
技术摘要:
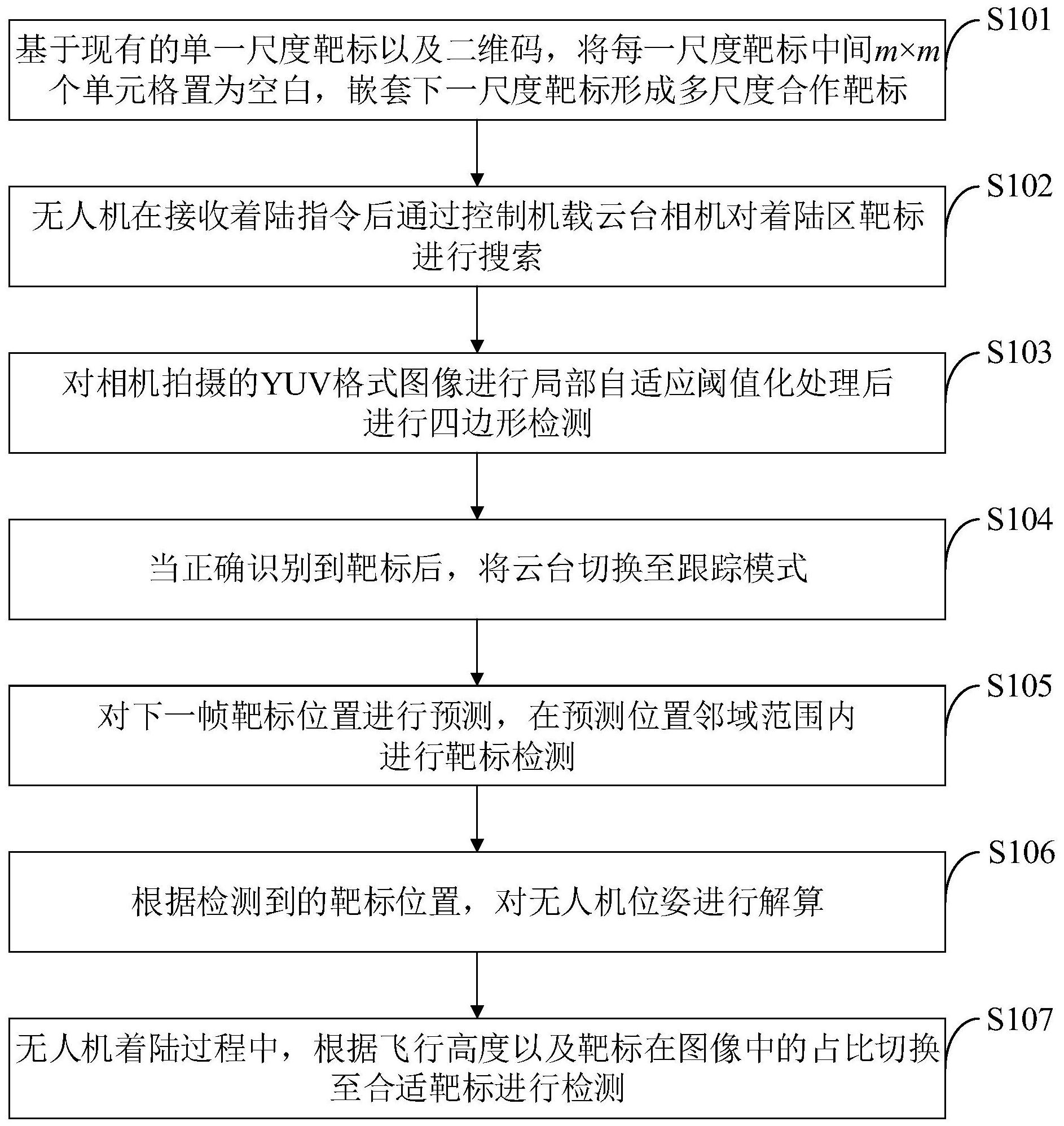
本发明属于无人机靶标设计与识别技术领域,公开了一种多尺度合作靶标设计与在线检测识别方法及系统,将每一尺度靶标中间m×m个单元格置为空白,嵌套下一尺度靶标形成多尺度合作靶标;无人机在接收着陆指令后通过控制机载云台相机对着陆区靶标进行搜索;对相机拍摄的YUV 全部
背景技术:
目前,无人机由于其灵活的应用方式受到了各界的青睐。然而,无人机的回收一直 以来是一个令人困扰的问题。据统计资料表明,世界航空史上有三分之一以上的飞行事故 发生在回收过程,无人机因回收失败而导致的事故更是占所有飞行事故的80%以上。因此, 各国科研工作者针对如何可靠、安全、快速地回收无人机开发了基于视觉引导的无人机着 陆/着舰系统。 基于视觉引导的无人机着陆/着舰是指在无人机回收阶段,通过无人机机载计算 机与云台相机载荷,完成着陆区域检测、跟踪与相对位姿解算,并依据解算信息实现对无人 机航迹规划、运动控制。进而实现不依赖于无线通信与GPS的向合作着陆场自主降落。基于 视觉引导的无人机自主回收过程需要使用靶标图案指示降落区域位置,现有靶标设计包 括:“H”形靶标、“T”形靶标、圆形靶标、正方形靶标等常规几何图案。现有靶标设计与识别技 术存在靶标特征点提取精度不高、靶标误识别率高、无法提供靶标ID信息、不具备不同距离 下的可识别性等问题,导致视觉引导系统误差较大甚至失效。 综上所述,现有技术存在的问题是:传统单一尺度靶标存在因距离过近导致靶标 图案溢出视野导致靶标无法检测,提取特征,继而影响无人机位姿解算以实现精准着陆的 问题。 现有视觉引导无人机着陆主要存在以下三个难点: (1)着陆/着舰区域稳定、快速识别; (2)靶标区域特征点的精确提取以及位姿解算算法。 (3)无人机状态估计以及航迹规划与运动控制。 再者,现有靶标设计与识别技术存在靶标靶标误识别率高(自然场景中存在相似 图案)、无法提供靶标ID信息(无法分辨不同靶标)、不具备不同距离下的可识别性等问题, 导致视觉引导系统误差较大甚至失效。 解决上述技术问题的意义:现有无人机自主回收系统主要依赖于GPS导航,然而 GPS精度较差、稳定性不高;使用RTK技术的自主回收系统组成复杂、成本高昂。本技术利用 无人机自身的机载云台与计算能力,实现了低成本、高精度、高可靠的自主回收。可广泛应 用于森林消防、边境巡检、电力检修、智慧农田等领域。通过“回收-换电-再释放”的方式缓 解无人机续航较短的问题,为无人机长时间工作提供技术保障。
技术实现要素:
针对现有技术存在的问题,本发明提供了一种多尺度合作靶标设计与在线检测识 别方法,旨在解决现有技术中由于靶标图案溢出视野导致靶标无法检测,提取特征,继而影 5 CN 111598952 A 说 明 书 2/9 页 响无人机位姿解算以实现精准着陆的问题。本发明提供的多尺度合作靶标设计与在线检测 识别方法主要解决了











