
技术摘要:
本申请实施例提供了一种卫星姿态控制系统的极性测试装置,用于在地面测试卫星姿态控制系统的极性时,显著提高测试效率。本申请实施例提供的卫星姿态控制系统包括,包括工作台、机械臂以及控制设备,工作台用于安装待测卫星;当触发第一测试任务时,控制设备向机械臂发 全部
背景技术:
卫星发射至太空后,入轨阶段或者在轨运行过程中,往往都涉及到卫星姿态的控 制,该卫星姿态指的是卫星的空间指向状态,通过调整卫星姿态,使得卫星在移动过程中或 者原地空间位置时的姿态调整至目标姿态状态,以进行相关的移动或者工作。 从上述可看出,卫星姿态的精确控制,对于卫星的运行具有重要意义。卫星在地面 阶段,需要对卫星姿态控制系统所涉及的组件进行测试,若测试出异常,则需对卫星姿态控 制系统所涉及的组件进行维护,以保证卫星姿态控制系统可正常工作。 而在对现有技术的研究和实践过程中,本申请实施例的发明人发现,现有技术中, 在测量卫星姿态控制系统所涉及的组件的极性时,往往是通过人工进行手动测量的,这意 味着需要耗费大量的人工成本以及时间成本,测试效率较低。
技术实现要素:
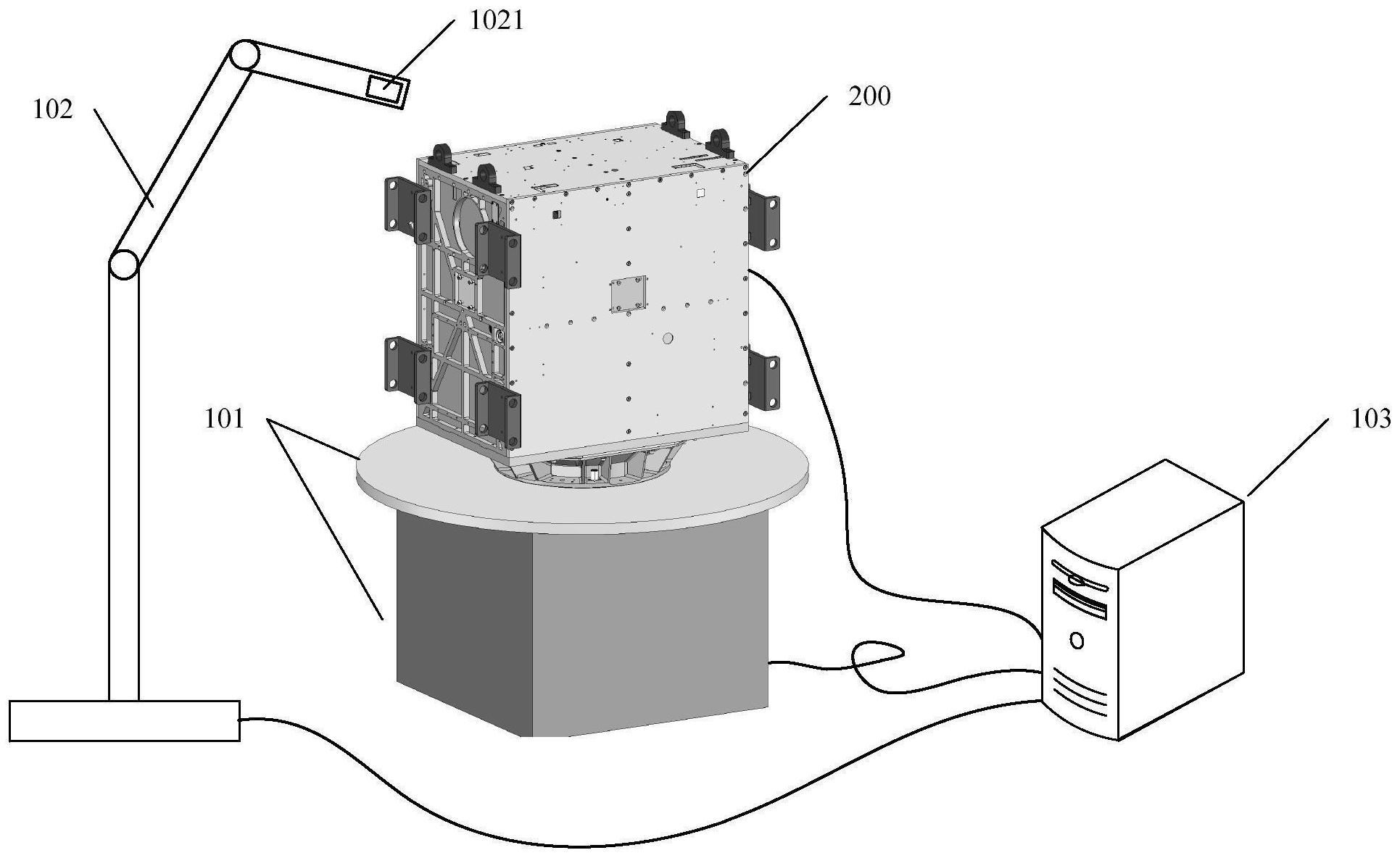
本申请实施例提供了一种卫星姿态控制系统的极性测试装置,用于在地面测试卫 星姿态控制系统的极性时,显著提高测试效率。 本申请实施例提供的一种卫星姿态控制系统的极性测试装置,装置包括工作台、 机械臂以及控制设备,工作台用于安装待测卫星; 当触发第一测试任务时,控制设备向机械臂发送第一控制信号,机械臂在第一控 制信号的控制下,通过安装于机械臂的模拟设备模拟对应的模拟信号,改变待测卫星的卫 星姿态控制系统的姿态状态,控制设备根据第一控制信号对应的第一极性测量值范围以及 采集到的卫星姿态控制系统的第一实际极性测量值,分析卫星姿态控制系统在第一测试任 务下的极性测试结果。 在又一种示例性的实现方式中,第一测试任务具体用于测试卫星姿态控制系统中 太阳敏感器的极性,机械臂在第一控制信号的控制下,将自身的空间位置调整至目标空间 位置,并将安装于机械臂的太阳模拟器模拟出的模拟太阳光源调整至目标模拟太阳光源, 第一极性测量值范围包括目标空间位置以及目标模拟太阳光源两者所对应的太阳角范围, 第一实际极性测量值包括太阳角实际测量值。 在又一种示例性的实现方式中,第一测试任务具体用于测试卫星姿态控制系统中 星敏感器的极性,机械臂在第一控制信号的控制下,将自身的空间位置调整至目标空间位 置,并将安装于机械臂的星模拟器模拟出的模拟星图调整至目标模拟星图,第一极性测量 值范围包括目标空间位置以及目标模拟星图两者所对应的星敏姿态角范围,第一实际极性 测量值包括星敏姿态角实际测量值。 在又一种示例性的实现方式中,第一测试任务具体用于测试卫星姿态控制系统中 磁强计的极性,机械臂在第一控制信号的控制下,将自身的空间位置调整至目标空间位置, 4 CN 111580492 A 说 明 书 2/10 页 并将安装于机械臂的磁力矩器输出的模拟磁矩调整至目标模拟磁矩,第一极性测量值范围 包括目标空间位置以及目标模拟磁矩两者所对应的磁矩范围,第一实际极性测量值包括磁 强计测得的磁矩实际测量值。 在又一种示例性的实现方式中,当触发用于测量卫星姿态控制系统中磁力矩器的 极性的第二测试任务时,控制设备向待测卫星发送第二控制信号,待测卫星在第二控制信 号的控制下,将安装于待测试卫星的磁力矩器输出的磁矩调整至目标磁矩,控制设备根据 目标磁矩以及安装于机械臂的磁强计的当前空间位置两者所对应的磁矩范围,以及根据磁 强计测得的磁矩实际测量值,分析磁力矩器在第二测试任务下的极性测量结果。 在又一种示例性的实现方式中,当触发用于测量卫星姿态控制系统中陀螺仪的极 性的第三测试任务时,控制设备向工作台发送第三控制信号,工作台在第三控制信号的控 制下,进行旋转,进而使得待测卫星在工作台的作用力下旋转并改变陀螺仪的极性,控制设 备根据第三控制信号对应的转速范围以及采集到的陀螺仪的转速实际测量值,分析陀螺仪 在第三测试任务下的极性测试结果。 在又一种示例性的实现方式中,当触发用于测量卫星姿态控制系统中反作用飞轮 的极性的第四测试任务时,控制设备向待测卫星发送第四控制信号,待测卫星在第四控制 信号的控制下,旋转反作用飞轮,进而使得工作台在反作用飞轮的作用力下转动,控制设备 根据第四控制信号对应的工作台的目标转速范围以及采集到的工作台的实际转速,分析反 作用飞轮在第四测试任务下的极性测试结果。 在又一种示例性的实现方式中,当触发用于测量卫星姿态控制系统中闭环逻辑的 极性的第五测试任务时,控制设备向工作台发送第五控制信号,工作台在第五控制信号的 控制下,进行旋转,控制设备还向待测卫星发送第六控制信号,以使得阻尼控制系统进行阻 尼控制,控制设备根据第五控制信号以及第六控制信号两者所对应的工作台的目标转速变 化范围,以及根据采集到的工作台的实际转速变化,分析闭环逻辑在第五测试任务下的极 性测试结果。 在又一种示例性的实现方式中,当触发用于测量卫星姿态控制系统中磁力计、陀 螺仪或者反作用飞轮的极性的第六测试任务时,控制设备将第六测试任务拆分为用于测试 X轴的极性对应的第一子测试任务、用于测试Y轴的极性对应的第二子测试任务以及用于测 试Z轴的极性对应的第三子测试任务,X轴、Y轴以及Z轴构成系统坐标系; 控制设备分别执行第一子测试任务、第二子测试任务或者第三子测试任务,在测 试过程中向机械臂发送第七控制信号,还向工作台发送第八控制信号,还向待测卫星发送 第九控制信号; 机械臂在第七控制信号的控制下,将自身的空间位置调整至目标空间位置,并将 安装与机械臂的磁力矩器输出的模磁矩调整至目标模拟磁矩;工作台在第八控制信号的控 制下,进行旋转,进而使得待测卫星在工作台的作用力下旋转并改变陀螺仪的极性;待测卫 星在第九控制信号的控制下,旋转反作用飞轮,进而使得工作台在反作用飞轮的作用力下 转动; 控制设备根据第一子测试任务、第二子测试任务以及第三子测试任务分别对应的 磁矩范围,磁矩范围与目标空间位置、目标模拟磁矩两者对应,以及根据在执行第一子测试 任务、第二子测试任务以及第三子测试任务时分别采集到的陀螺仪的转速实际测量值,分 5 CN 111580492 A 说 明 书 3/10 页 析磁力计在第一子测试任务、第二子测试任务以及第三子测试任务下的极性测试结果;控 制设备根据第一子测试任务、第二子测试任务以及第三子测试任务分别对应的转速范围, 以及根据在执行第一子测试任务、第二子测试任务以及第三子测试任务时分别采集到的陀 螺仪的转速实际测量值,分析陀螺仪在第一子测试任务、第二子测试任务以及第三子测试 任务下的极性测试结果;控制设备根据第一子测试任务、第二子测试任务以及第三子测试 任务分别对应的工作台的目标转速范围,以及根据在执行第一子测试任务、第二子测试任 务以及第三子测试任务时分别采集到的工作台的实际转速,分析反作用飞轮在第一子测试 任务、第二子测试任务以及第三子测试任务下的极性测试结果。 在又一种示例性的实现方式中,控制设备与待测卫星之间通过无线通信连接进行 信号的传输;或者,工作台通过滑环连接结构安装待测卫星,控制设备通过滑环连接结构与 待测卫星建立有线通信连接,以进行信号的传输。 从以上技术方案可以看出,本申请实施例具有以下优点: 在本申请实施例中,针对于卫星姿态控制系统的极性测量,配置了卫星姿态控制 系统的极性测量装置,该装置包括了工作台、机械臂以及控制设备,在将待测卫星安装于工 作台后,可通过机械臂上的模拟设备模拟对应的模拟信号,改变待测卫星的卫星姿态控制 系统的姿态状态,从而控制设备可根据预测的极性测量值范围以及实际极性测量值,分析 待测卫星的卫星姿态控制系统的极性是否存在异常,通过工作台、机械臂以及控制设备三 者,不仅可完成待测卫星的卫星姿态控制系统中不同组件的极性测试,且还可实现高效率 的自动化测试,从而可显著节省现有技术中需要的大量时间成本以及人工成本,进而在卫 星的研发以及制造过程中可显著缩短卫星的研制周期以及制造效率。 附图说明 图1为本申请实施例卫星姿态控制系统的极性测试装置的一种结构示意图; 图2为本申请实施例的一种应用场景示意图; 图3为本申请实施例太阳敏感器的极性测试的一种流程示意图; 图4为本申请实施例星敏感器的极性测试的一种流程示意图; 图5为本申请实施例磁强计的极性测试的一种流程示意图; 图6为本申请实施例磁力矩器的极性测试的一种流程示意图; 图7为本申请实施例陀螺仪的极性测试的一种流程示意图; 图8为本申请实施例反作用飞轮的极性测试的一种流程示意图; 图9为本申请实施例闭环逻辑的极性测试的一种流程示意图。











