
技术摘要:
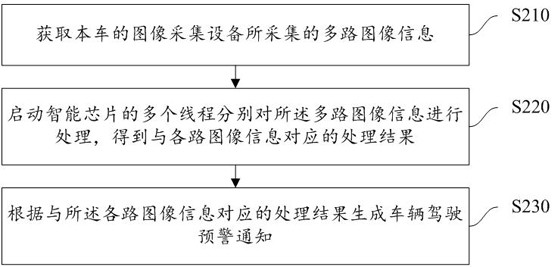
本申请的实施例提供了一种车辆驾驶预警方法、装置、计算机可读介质及电子设备。该车辆驾驶预警方法包括:获取本车的图像采集设备所采集的多路图像信息;启动智能芯片的多个线程分别对所述多路图像信息进行处理,得到与各路图像信息对应的处理结果;根据与所述各路图像 全部
背景技术:
目前,随着人们生活水平的逐渐提高,车辆的数量也与日俱增,进而使得交通安全 成为日益严峻的问题,也逐渐为人们重视。为减少交通事故的发生,对车辆驾驶风险进行提 前预警显得尤为必要,然而,现有车辆驾驶预警方法存在着各种不足,例如,常用的雷达、激 光、超声波等技术所需设备昂贵,不利于在所有车辆上推广使用,监测不全面,生成预警通 知不及时或者错误预警的情况。
技术实现要素:
本申请的实施例提供了一种车辆驾驶预警方法、装置、计算机可读介质及电子设 备,进而至少在一定程度上保证了车辆预警通知更准确,更全面,更及时,从而能够减少交 通事故的发生。 本申请的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本申请 的实践而习得。 根据本申请实施例的一个方面,提供了一种车辆驾驶预警方法,包括:获取本车的 图像采集设备所采集的多路图像信息;启动智能芯片的多个线程分别对所述多路图像信息 进行处理,得到与各路图像信息对应的处理结果;根据与所述各路图像信息对应的处理结 果生成车辆驾驶预警通知。 根据本申请实施例的一个方面,提供了一种车辆驾驶预警装置,包括:获取单元, 用于获取本车的图像采集设备所采集的多路图像信息;处理单元,用于启动智能芯片的多 个线程分别对所述多路图像信息进行处理,得到与各路图像信息对应的处理结果;生成单 元,用于根据与所述各路图像信息对应的处理结果生成车辆驾驶预警通知。 在本申请的一些实施例中,基于前述方案,所述图像采集设备包括本车的前置图 像采集设备,所述多路图像信息包括所述本车的前置图像采集设备采集的前方图像信息, 所述处理单元配置为:启动智能芯片对应的线程从所述前方图像信息提取前方车辆的图 像,所述前方车辆的图像用于确定所述本车与所述前方车辆的距离;根据所述本车与所述 前方车辆的距离以及所述本车的速度,确定所述前方车辆与所述本车的碰撞时间;将所述 碰撞时间与第一碰撞时间阈值进行比较,得到与所述前方图像信息对应的处理结果。 在本申请的一些实施例中,基于前述方案,所述生成单元配置为:若所述处理结果 指示所述前方车辆与所述本车的碰撞时间小于所述第一碰撞时间阈值,则生成车辆前向碰 撞预警通知。 在本申请的一些实施例中,基于前述方案,所述图像采集设备包括本车的红外图 像采集设备,所述多路图像信息包括所述本车的红外图像采集设备采集的本车驾驶员图像 4 CN 111583714 A 说 明 书 2/12 页 信息,所述处理单元配置为:启动智能芯片对应的线程从所述本车驾驶员图像信息提取本 车驾驶员的脸部特征信息;根据所述脸部特征信息,得到所述本车驾驶员异常状态监测结 果。 在本申请的一些实施例中,基于前述方案,所述生成单元配置为:根据所述本车驾 驶员异常状态监测结果生成车辆驾驶预警通知,所述车辆驾驶预警通知包括驾驶员疲劳驾 驶预警通知、驾驶员分神驾驶预警通知、驾驶员抽烟预警通知、驾驶员接打电话预警通知中 的至少一种。 在本申请的一些实施例中,基于前述方案,所述图像采集设备包括本车的侧置图 像采集设备,所述多路图像信息包括所述本车的侧置图像采集设备采集的后方图像信息, 所述处理单元配置为:启动智能芯片对应的线程从所述后方图像信息提取后方车辆的图 像,所述后方车辆的图像用于确定所述本车与所述后方车辆的距离;根据所述本车与所述 后方车辆的距离以及所述本车的速度确定所述后方车辆与所述本车的碰撞时间;将所述碰 撞时间与第二碰撞时间阈值进行比较,得到与所述后方图像信息对应的处理结果。 在本申请的一些实施例中,基于前述方案,所述生成单元配置为:若所述处理结果 指示所述后方车辆与所述本车的碰撞时间小于所述第二碰撞时间阈值,则生成车辆后向碰 撞预警通知。 在本申请的一些实施例中,基于前述方案,所述图像采集设备包括本车的内置图 像采集设备,所述多路图像信息包括所述本车的内置图像采集设备采集的车内图像信息, 所述处理单元配置为:启动智能芯片对应的线程从所述车内图像信息提取车内人员图像; 对所述车内人员图像进行人体识别,得到所述车内人员监测结果。 在本申请的一些实施例中,基于前述方案,所述生成单元配置为:若所述车内人员 监测结果为所述车内人员未系安全带,则生成未系安全带预警通知。 根据本申请实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机 程序,所述计算机程序被处理器执行时实现如上述实施例中所述的车辆驾驶预警方法。 根据本申请实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器; 存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执 行时,使得所述一个或多个处理器实现如上述实施例中所述的车辆驾驶预警方法。 本申请与现有技术相比,具有如下优点和有益效果: 1、本申请中,只需采用图像采集设备和智能芯片即可进行车辆驾驶预警处理,相比雷 达、激光、超声波等技术,节省了硬件成本。 2、一方面,本申请可以同时启动智能芯片的多个线程分别对多路图像信息进行处 理,考虑了多路图像信息,实现了对车辆驾驶过程的全面监测,并且保证了对各路图像信息 的及时、有效处理,另一方面,本申请在智能芯片上进行多路图像信息的处理,大大降低了 CPU的负载,提高了车辆预警通知的准确度。 应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不 能限制本申请。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施 5 CN 111583714 A 说 明 书 3/12 页 例,并与说明书一起用于解释本申请的原理。显而易见地,下面描述中的附图仅仅是本申请 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 这些附图获得其他的附图。在附图中: 图1示出了可以应用本申请实施例的技术方案的一个示例性系统架构的示意图。 图2示出了根据本申请的一个实施例的车辆驾驶预警方法的流程图。 图3示出了根据本申请的一个实施例的步骤S220的详细流程图。 图4示出了根据本申请的另一个实施例的步骤S220的详细流程图。 图5示出了根据本申请的另一个实施例的步骤S220的详细流程图。 图6示出了根据本申请的另一个实施例的步骤S220的详细流程图。 图7示出了根据本申请的一个实施例的车辆驾驶预警装置的框图。 图8示出了适于用来实现本申请实施例的电子设备的计算机系统的结构示意图。











