
技术摘要:
本发明公开了用于为人类运动(包括髋部运动和踝部运动)提供辅助的软外套系统和方法。传感器反馈用于确定致动可穿戴式机器人系统以传递期望的关节运动辅助的适宜分布。考虑使用者动力学和运动学的变化以及可穿戴式机器人系统的构造、材料和适配,以便提供针对使用者和当 全部
背景技术:
在过去十年中,已经开发了许多下肢外骨骼以在各种条件下辅助人类步态。一些 装置被设计成辅助受损的或健全的人,而其他装置被设计成使得负荷运输更容易。通常,这 些装置由能够对穿戴者提供高辅助扭矩的刚性外骨骼结构组成。然而,刚性框架可能会限 制穿戴者的自然运动,并且当它们与穿戴者的生物关节不对准时可能施加不期望的力。此 外,刚性装置可能特别是在远端区域上具有大的惯性,这可能阻碍穿戴者的运动并且从控 制的角度提供挑战。 已经开发了利用主要柔软、柔性或半柔性部件(例如,织物)的外套来解决外骨骼 的这些问题特征中的一些问题。许多这种外套的共形、不引人注目和顺应性质减轻了与刚 性外套相关的许多上述问题,但是反过来又引起了新的问题。软外套通常不像刚性外骨骼 那样承载,因此在外套中产生的力最终传递到使用者的身体并由其承载。因此,舒适性和安 全性考虑可能限制能够被产生以辅助运动的力的量。此外,由于软外套可能直接穿戴在使 用者的皮肤上或穿在衣服上,所以舒适性可能是关键的设计考虑。然而,通常,针对舒适性 的设计考虑通常与针对维持用于通过其传递负荷的有效系统刚度的设计考虑冲突。特别 地,许多舒适的织物当被置于张力下时易于拉伸。这种拉伸可以有效地从外套中排出能量, 使得与使用更高模量的材料相比,需要提供更大的电机和消耗更大量的功率以产生与人体 相同的辅助力。此外,拉伸可能导致外套的元件变得与其在身体上的预期位置不对准和/或 移位,可能导致不舒服,不自然的关节扭矩和增加的功率要求。软外套的固有顺应性和非线 性机械结构还可能使得难以精确和可靠地将期望量的力传递到使用者身体的各个部分以 辅助运动。因此,需要一种用于辅助运动的轻质、舒适的外套,其被构造成在身体上保持期 3 CN 111568701 A 说 明 书 2/45 页 望的位置和对准,并且通过其提供有效的负荷路径和传递特性。 除了致动软外套的机械挑战之外,另一个挑战在于在关节运动学和肌肉活动模式 中给出相当大的变化性来提供有效的帮助。用于控制运动辅助的现有方法使用历史数据或 预定常数来估计辅助的开始,并且因此不能解决穿戴者的当前步法的正常或不可预测的变 化。特别地,许多控制系统利用来自先前步法的历史或预定数据来估计在当前步法期间将 被辅助的运动的开始。其他系统可以被构造成在设置为与普通人的步态周期的某些部分相 对应的预定的、恒定的时间偏移上施加功率。这在使用者的步态变化的情况下可能是有问 题的,在现实生活中通常是这样。因此,需要一种被构造成实时地适应使用者的运动并且因 此以适当的时机和幅度提供辅助功率的控制系统。 另一个挑战是,在由于性别、年龄、身高、体重和诸如行动速度等空间-时间因素引 起的穿戴者动力学的相当大变化性的情况下,提供有效的辅助。现有的控制系统不能解决 这些变化,而是提供未针对外套的特定穿戴者定制的一种尺寸适合所有的辅助幅度。因此, 需要一种被构造成适应外套的特定穿戴者和/或正在进行的活动特性的辅助幅度的控制系 统。
技术实现要素:
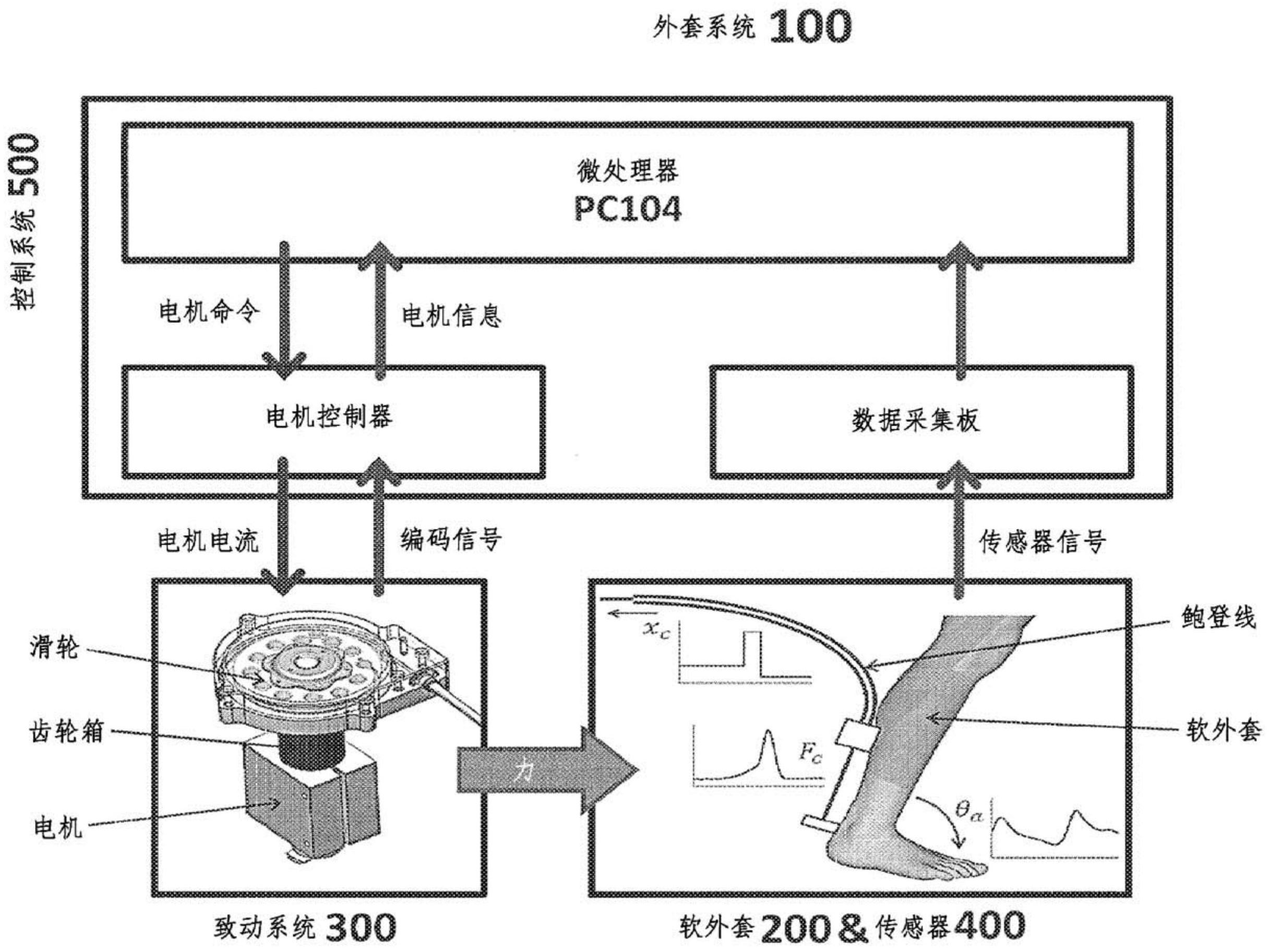
本发明公开了使用外套系统为人类运动提供辅助的系统和方法。在各种实施方案 中,外套可以被致动以向人体施加辅助力,以加强由下层肌肉组织产生的力。可以使用各种 传感器来监测在外套中产生的力以及使用者身体的运动,以便确定用于致动外套的合适分 布,从而在适当的时机传送期望水平的辅助。 在各种实施方案中考虑使用者动力学和运动学的变化以及可穿戴式机器人系统 的构造、材料和适配,以便提供针对使用者和当前活动定制的辅助。在各种实施方案中,外 套可以使用迭代方法致动,该迭代方法将外套中产生的实际力或积分功率与期望的那些进 行比较,从而确保适当的致动幅度,而不管外套系统的使用者之间的适配和身体特性的变 化。在各种实施方案中,提供的辅助幅度可能受到诸如体重和空间-时间(如行动速度)等影 响身体的生物负荷的因素所影响。此外,在各种实施方案中,身体运动和步态事件的实时检 测可以用于在任何给时机针对使用者的实际运动定制辅助的时机,从而解决使用者的运动 或步态的正常或不可预测的变化。 在各种实施方案中,运动辅助可以提供给使用者的髋关节以辅助运动。在各种实 施方案中,这可以包括确定在使用者的当前步态周期期间由外套系统产生的期望峰值力或 积分功率,从而产生致动分布,根据所述致动分布可以致动外套以产生所述期望峰值力或 积分功率,监测髋关节的角度的实时测量,以检测髋关节何时达到最大屈曲角度,和响应于 检测到髋关节的角度已经达到最大屈曲角度,根据所述致动分布来致动可穿戴式机器人系 统,以辅助使用者的髋关节的伸展运动。 在各种实施方案中,运动辅助可以提供给使用者的踝关节以辅助运动。在一个实 施方案中,可以在踝关节的站姿背屈和站姿跖屈运动的一个或组合期间提供辅助。可以通 过实时监测传感器测量以检测脚跟着地和踝部旋转方向的随后变化来确定适当的时机,踝 部旋转方向指示从站姿背屈运动到站姿跖屈运动的过渡。响应于检测到踝关节的测量旋转 速度的方向的第一变化,外套可以被致动以辅助使用者的踝关节的跖屈运动。在一个实施 4 CN 111568701 A 说 明 书 3/45 页 方案中,外套系统可以被构造成分别独立地控制在背屈和跖屈运动期间传递到踝关节的负 和正功率。 附图说明 下面将参照附图进一步解释本公开的实施方案。所示的附图不一定按比例绘制, 而是通常重点放在示出本公开实施方案的原理。 图1示出了软外套的代表性实施方案; 图2示出了软外套的代表性实施方案; 图3A示出了软外套的代表性实施方案的前视图; 图3B示出了软外套的代表性实施方案的后视图; 图3C示出了软外套的代表性实施方案的侧视图; 图4A示出了腰部锚固构件的代表性实施方案的前视图; 图4B示出了腰部锚固构件的代表性实施方案的后视图; 图4C示出了腰部锚固构件的替代实施方案的前视图; 图4D示出了腰部锚固部的实施方案,其中连接元件接合腰部锚固构件的前部; 图4E示出了腰部锚固部的实施方案,其中连接元件接合腰部锚固构件的侧部; 图5示出了大腿锚固部的代表性实施方案; 图6A示出了小腿锚固部的代表性实施方案的前视图; 图6B示出了小腿锚固部的代表性实施方案的后视图; 图6C示出了小腿锚固部的实施方案; 图6D示出了包括可以在特定方向上用织物颗粒定向的织物的小腿锚固部; 图6E示出了用于将小腿锚固部与连接元件连接的代表性联接元件的前视图; 图6F示出了用于将小腿锚固部与连接元件连接的代表性联接元件的后视图; 图6G示出了具有Y形带和通过环插入的两个销子的代表性联接元件, 图6H示出了用于联接和致动连接元件与小腿锚固部的代表性机构; 图7A示出了脚部锚固构件的实施方案,其中锚固构件包括靴子; 图7B示出了代表性加强部件。 图7C示出了安装在靴子上的代表性加强部件; 图7D示出了鞋类加强部的实施方案; 图8A示出了连接元件的代表性实施方案的立体图; 图8B示出了连接元件的代表性实施方案的立体图; 图8C示出了连接元件的代表性实施方案的立体图; 图9A示出了基层的实施方案的前视图; 图9B示出了基层的实施方案的后视图; 图9C示出了基层的实施方案的侧视图; 图10示出了用于在软外套中产生张力的代表性致动系统; 图11示出了位于远离软外套的一部分的电机,线缆连接到电机上并在其间延伸; 图12A示出了包括腰部锚固部和沿着大腿后部的大腿锚固部的软外套的实施方 案; 5 CN 111568701 A 说 明 书 4/45 页 图12B示出了包括腰部锚固部和沿着大腿前部的大腿锚固部的软外套的实施方 案; 图12C示出了包括小腿锚固部和脚部锚固部的软外套的实施方案; 图12D示出了包括腰部锚固部、脚部锚固部和在其间延伸的连接元件的软外套的 实施方案; 图12E示出了包括具有第一模块和第二模块的两个模块的软外套的实施方案; 图13示出了被构造成将由致动系统产生的力的一部分分配到使用者身体的各个 部分的软外套; 图14A示出了位于线缆和腰部锚固部之间的界面处的力传感器; 图14B示出了位于连接元件和线缆之间的界面处的力传感器; 图15示出了控制系统的示例性实施方案; 图16A示出了将经由软外套传递到使用者身体的代表性力分布; 图16B示出了用于产生力分布的代表性致动分布; 图17A是将行动速度与施加在髋部上的生理功率的峰值大小进行比较的图; 图17B示出了与髋部辅助相关联的乘数可以随着步行速度基本线性地增加; 图17C示出了通过图17B的乘数调节的可以施加到髋关节的一些示例性调节峰值 力; 图18A是比较行动速度与施加在踝关节上的生理功率的峰值大小的图; 图18B示出了与踝部辅助相关联的乘数可以随着步行速度基本线性地增加; 图18C示出了通过图18B的乘数调节的可以施加到踝关节的一些示例性调节峰值 力; 图19A示出了在矢状面中的髋部运动范围; 图19B示出步行速度估计的验证; 图20是髋部控制架构的实施方案的示意图。 图21A示出了典型的步态周期; 图21B示出了腿筋的步态周期; 图21C示出臀大肌的步态周期; 图22A示出了用于辅助髋部运动的力的示例性应用; 图22B示出了用于辅助大腿运动的力的示例性应用; 图23A示出了相应的代表性髋部角度测量; 图23B示出了用于辅助髋关节伸展运动的代表性力分布; 图23C示出了用于辅助髋关节伸展运动的代表性致动分布; 图24是包括障碍物躲避检测单元的髋部控制架构的实施方案的示意图; 图25A是针对与障碍物躲避动作相关联的髋部运动实时监测的髋部角度数据的示 意图; 图25B是在髋部周围施加力的线缆的示意图。 图25C是软外套中的相应髋部辅助线缆的系统命令致动的示意图; 图26是踝部控制系统的实施方案的示意图。 图27示出了在步态周期中在30-60%期间在踝部处与下层肌肉同时产生力矩的外 6 CN 111568701 A 说 明 书 5/45 页 套; 图28A示出了踝关节的预张力和主动力区域; 图28B示出了踝关节的预张力和主动力区域; 图28C示出了踝关节的预张力和主动力区域; 图29A示出踝关节运动和所得到的功率之间的关系; 图29B示出踝关节力矩和所得到的功率之间的关系; 图29C是表示踝关节速度与所得到的功率之间的关系; 图29D示出了命令的线缆位置和所得到的力之间的关系;和 图29E示出了所产生的踝部辅助力和主动力之间的关系。 虽然上述附图阐述了本公开的实施方案,但是如在讨论中所指出的,还可以想到 其他实施方案。本公开通过表示而非限制的方式呈现了说明性实施方案。本领域技术人员 可以设计落入本公开实施方案的原理的范围和精神内的许多其他修改和实施方案。











