
技术摘要:
本发明适用于计算机技术领域,提供了一种水位测量方法、装置、计算机设备及存储介质,所述水位测量方法包括:获取当前位置信息以及大地高程值,当前位置信息与大地高程值是由星站差分GPS接收机确定;根据所述当前位置信息以及预设的位置‑高程异常值模型确定高程异常值 全部
背景技术:
当前国内经济加大了从陆地、近海走向远海的进程,沿海远距离航道疏浚工程将 越来越多。而在远距离航道疏浚工程中,对实时水位的确定至关重要。 然而,现有的较为常用的水位测量方法技术中,岸边布设潮位遥报仪实时测绘水 位存在着受无线电通信距离的限制,在远距离船舶施工工程中难以实现,获取的水位值不 能实时的传输到施工船舶;采取抛压力式验潮仪需要先采集数据,再对数据进行处理,导致 水位数据的实时性不好,获取的水位不能准确反映施工船舶所在位置的实际水位值。 可见,现有的水位测量方法在用于远距离实时水位测量时,还存在着难以精确获 取实时水位的技术问题。
技术实现要素:
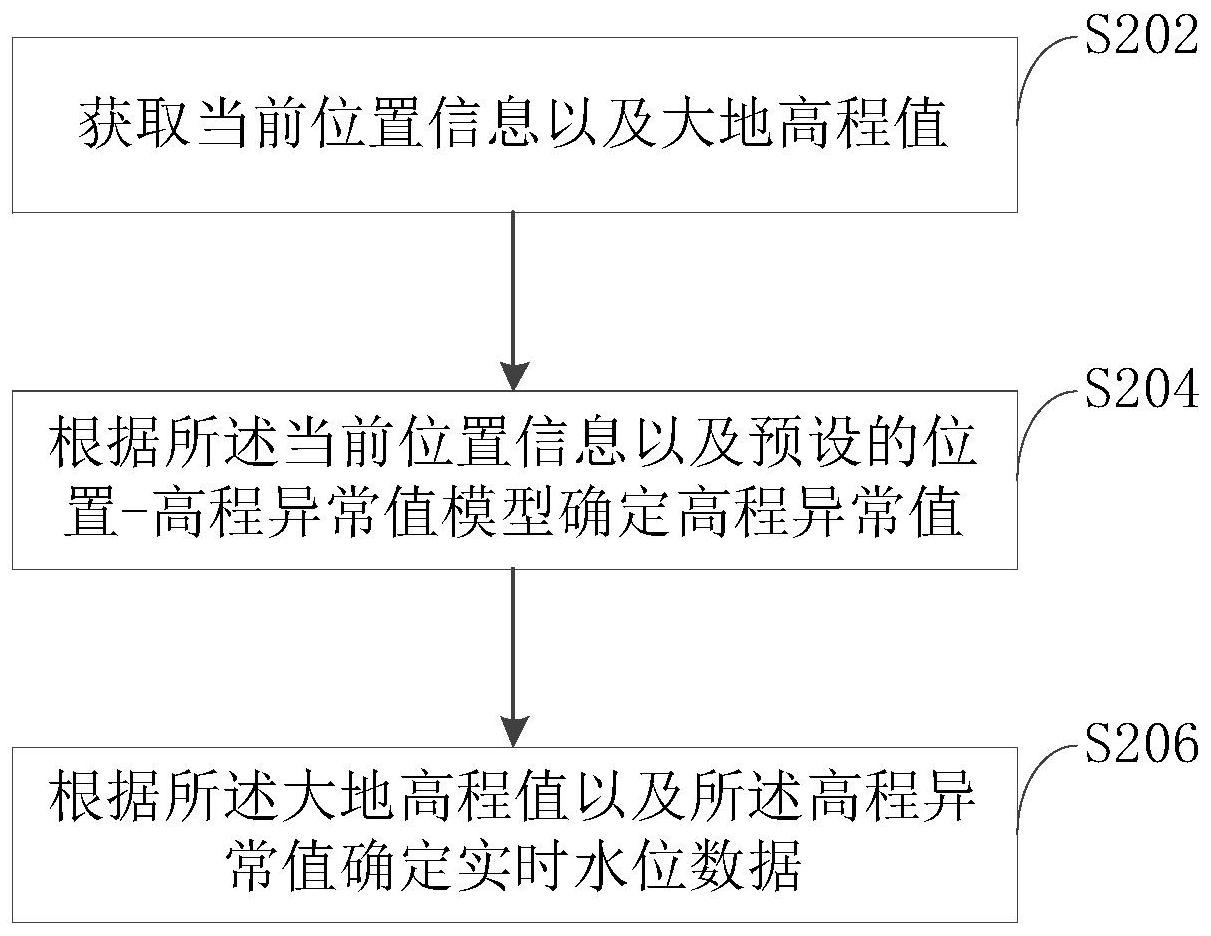
本发明实施例的目的在于提供一种水位测量方法,旨在解决现有的水位测量方法 在用于远距离实时水位测量时,还存在着难以精确获取实时水位的技术问题。 本发明实施例是这样实现的,一种水位测量方法,包括: 获取当前位置信息以及大地高程值;所述当前位置信息与所述大地高程值是由星 站差分GPS接收机确定; 根据所述当前位置信息以及预设的位置-高程异常值模型确定高程异常值;所述 预设的位置-高程异常值模型是基于预设的测绘数据并通过EGM 2008模型构建的; 根据所述大地高程值以及所述高程异常值确定实时水位数据。 本发明实施例的另一目的在于提供一种水位测量装置,包括: 位置信息与大地高程值获取单元,用于获取当前位置信息以及大地高程值;所述 当前位置信息与所述大地高程值是由星站差分GPS接收机确定; 高程异常值确定单元,用于根据所述当前位置信息以及预设的位置-高程异常值 模型确定高程异常值;所述预设的位置-高程异常值模型是基于预设的测绘数据并通过EGM 2008模型构建的; 实时水位数据计算单元,用于根据所述大地高程值以及所述高程异常值确定实时 水位数据。 本发明实施例的另一目的在于提供一种计算机设备,包括存储器和处理器,所述 存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行 如上述所述水位测量方法的步骤。 本发明实施例的另一目的在于提供一种计算机可读存储介质,所述计算机可读存 储介质上存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如上 4 CN 111551234 A 说 明 书 2/8 页 述所述水位测量方法的步骤。 本发明实施例提供的一种水位测量方法,通过获取通过星站差分GPS接收机接收 到的当前位置信息以及大地高程值之后,先根据所述当前位置信息以及预先设定好的位 置-高程异常值模型确定高程异常值,再直接利用大地高程值以及高程异常值来确定实时 水位数据。本发明实施例提供的水位测量方法利用星站差分GPS接收机接收卫星差分信号 来获取高精度的位置信息,不再受到无线电通信距离的限制,且需要用到的大地高程值矫 正过程是基于预先设定好的位置-高程异常值模型来矫正的,可以较好实现实时水位测量, 在用于指导船舶施工的过程中具有显著的实际意义。 附图说明 图1为本发明实施例提供的水位测量方法的应用环境图; 图2为本发明实施例提供的一种水位测量方法的步骤流程图; 图3为本发明实施例提供的另一种水位测量方法的步骤流程图; 图4为本发明实施例提供的又一种水位测量方法的步骤流程图; 图5为本发明实施例提供的一种确定高程异常值的步骤流程图; 图6为本发明实施例提供的一种构建位置-高程异常值模型的步骤流程图; 图7为本发明实施例提供一种确定深度精准面大地高模型的步骤流程图; 图8为本发明实施例提供的一种水位测量装置的结构示意图; 图9为本发明实施例提供的一种用于执行水位测量方法的计算机设备的内部结构 图。











