
技术摘要:
一种适用于机械手在手操作的目标旋转检测方法,它包括步骤一:对检测系统进行标定和初始化;步骤二:计算机械手坐标系下的作业目标质心的初始坐标区间和初始旋转半径区间;步骤三:利用力/力矩传感器实时检测作业目标的受力状态,依据检测结果判断此时作业目标所处的条 全部
背景技术:
近些年机器人的应用场景越来越广泛,对机器人的目标操作能力的要求也越来越 高,特别是机器人的目标自主抓取和灵巧操作能力。为了顺利完成任务,机器人在抓取作业 目标后,在手目标不能出现意外旋转,否则容易引起作业目标位姿发生变化甚至目标掉落, 进而造成机器人作业任务失败。因此,对于机器人而言,目标旋转的在手检测能力对顺利完 成目标作业任务具有重要意义。 作业目标的在手操作是机器人实现灵巧作业的重要前提,机器人在手操作的研究 更是成为近些年来机器人领域的研究热点。然而,面向机械手在手操作的目标旋转检测方 法较少。现有方法包括采用阵列式触觉传感器检测目标旋转,具体体现为当目标发生旋转 后,传感器的阵列传感点的相应数量或者位置发生变化,进而判断目标发生旋转。这种方法 虽然具有一定的可行性,但触觉传感器技术不够成熟且该方法很难区分目标的滑动状态和 旋转状态。视觉传感器也可以用于目标的旋转状态的检测,具体体现为利用视觉传感器对 目标形状和机械手状态进行识别并进行连续跟踪,通过检测目标和机械手之间是否发生相 对位移,进而判断目标是否发生旋转。该类方法的视觉处理算法通常较为复杂,为了保证检 测的实时性,需要专用处理器进行算法实现,不利于机器人控制系统的软硬件集成;此外, 当视觉出现遮挡问题时,该类旋转检测方法极易失效;因此,基于视觉传感器的旋转检测方 法很难在机器人检测目标旋转的过程中进行实际应用。此外,公开号为CN207884454U的对 旋转物体转动位置进行检测及控制的装置,其结构属于大型结构,在机械手上无法进行安 装,且所提检测方法完全依托于该装置才能实现,故无法应用于机械手抓取目标时的目标 旋转检测。公开号CN106796118A的用于无接触地检测旋转构件的转动角度的传感器组件, 所提方法的检测原理是涡流效应,该方法只能用于金属目标的旋转检测,无法完全覆盖机 器人全部的作业目标。公开号为CN106796119A的用于无接触地检测旋转构件的转动角度的 传感器组件,同样是基于涡流效应原理检测金属目标的旋转,并不能满足不同材料目标的 旋转检测要求。 综上所述,针对机器人的目标抓取和操作领域,迫切需要一种可有效检测目标旋 转的方法。
技术实现要素:
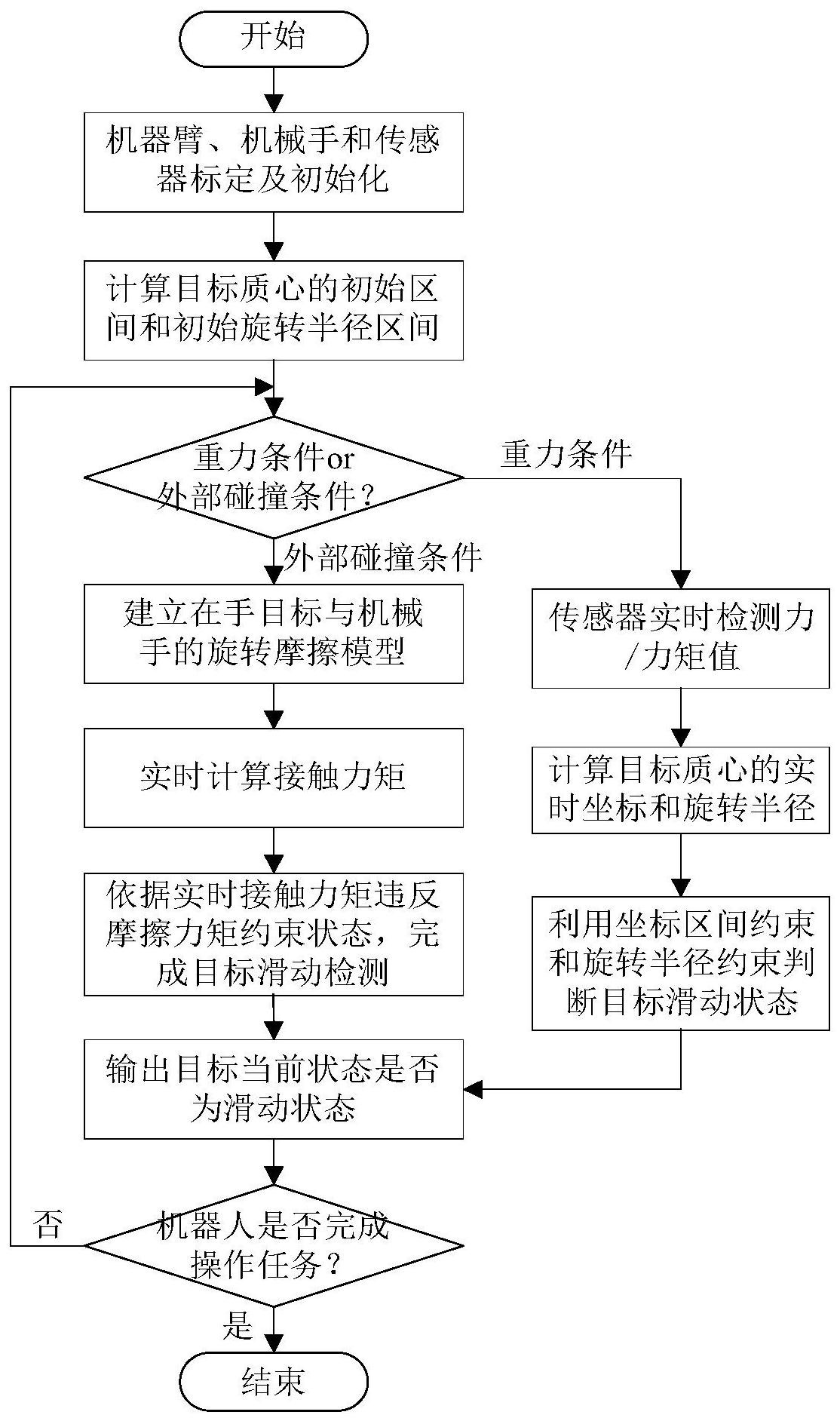
本发明是为克服现有技术不足,提出一种适用于机械手在手操作的目标旋转检测 方法。这种方法利用安装于机械手指尖处的双力/力矩传感器,检测机器人抓取目标后的受 力状态,通过纯重力条件和外部碰撞条件的旋转判别条件,通过不同条件下的旋转检测方 法完成对作业目标的旋转检测,实现机器人对各条件下目标旋转进行在手检测。该旋转检 6 CN 111604901 A 说 明 书 2/7 页 测方法有助于提高机器人对目标状态的感知能力,对机器人完成作业目标的稳定抓取和灵 巧操作具有重要意义。 本发明所采用的技术方案如下: 步骤一:对检测系统进行标定和初始化,包括机械臂、机械手和力/力矩传感器的 标定和初始化; 步骤二:控制机械臂和机械手对目标进行抓取,抓取完成时刻记为初始时刻t0,在 时间区间[t0,t1]内,利用力/力矩传感器检测作业目标的受力状态,通过区间运算和质心位 置模型,计算机械手坐标系O-XYZ下的作业目标质心的初始坐标区间 和初始旋转半 径区间 步骤三:利用力/力矩传感器实时检测作业目标的受力状态,依据检测结果判断此 时作业目标所处的条件; 如果力/力矩传感器为无脉冲波动输出,则采用纯重力条件的旋转检测方法进行 目标旋转检测;在纯重力条件下,利用力/力矩传感器的力输出值和力矩输出值,根据步骤 二中作业目标的质心坐标P(x,y,z)和质心旋转半径d的计算方法,计算出当前i时刻作业目 标的质心坐标Pi(x,y,z)和质心旋转半径di,通过判别i时刻的质心坐标Pi(x,y,z)和质心旋 转半径di是否满足质心的初始坐标区间 和初始旋转半径区间 的约束,从而 检测作业目标是否发生旋转; 如果力/力矩传感器的输出值出现脉冲波动,则采用外部碰撞条件的旋转检测方 法进行目标旋转检测;在外部碰撞条件下,建立作业目标与机械手的旋转摩擦模型和接触 面的摩擦力矩约束FRM; FRM={M|||M||≤Mf=F(η,Fn)} 根据机械手的实际结构,计算机械手和作业目标的接触摩擦力矩值Mf, 其中,η是机械手与作业目标的接触旋转摩擦系数,通过先验旋转实验获取,Fn为 机械手的抓取力,R和r分别是机械手指尖的外径和内径; 通过力/力矩传感器检测实时接触力矩Mi,判断实时接触力矩Mi是否满足摩擦力矩 约束FRM,从而检测作业目标是否发生旋转; 步骤四:机器人完成当前状态下作业目标的旋转检测后,若作业目标当前状态不 产生旋转,则完成对作业目标的操作任务;若作业目标当前状态产生旋转,重复步骤三,直 至作业目标当前状态不产生,直至机器人完成对作业目标的操作任务。 本发明相比现有技术的有益效果: 一、本发明的目标旋转的检测方法,可以基于机械手处的传感器信息对目标发生 旋转的外部条件进行判别,实现了纯重力条件和外部碰撞条件下的目标旋转检测。具体检 测方法包括:纯重力条件下目标旋转的检测方法是借助力/力矩传感器检测作业目标处的 力和力矩,利用区间运算和质心位置模型计算目标质心的初始坐标区间和初始旋转半径区 间;通过判断质心的实时坐标和旋转半径是否满足坐标区间和旋转半径区间的约束,进而 检测作业目标是否发生旋转。而外部碰撞条件下目标旋转的检测方法是建立机械手与作业 7 CN 111604901 A 说 明 书 3/7 页 目标的旋转摩擦模型和摩擦力矩约束,通过判别实时接触力矩是否满足摩擦力矩约束,进 而检测作业目标是否发生旋转。通过本发明的检测方法,机器人可以有效地检测机械手进 行在手操作时的目标旋转状态,避免因目标旋转而造成机器人对目标的操作失误,提升了 机器人在手操作目标的能力。 二、本发明的目标旋转检测方法,可以判别目标发生旋转的外部条件,即纯重力条 件和外部碰撞条件,进而通过各外部条件下的旋转检测方法,实现机器人对在手目标的旋 转检测。通过本发明的检测方法检测在手目标的旋转状态,机器人可以根据当前的状态采 取操作策略,避免出现目标意外掉落的情况,提高了机器人对目标状态的感知能力和目标 操作的稳定性,特别适用于机器人对作业目标进行抓取和在手操作的领域,对提升机器人 的在手感知和灵巧作业能力具有重要意义。 三、本发明在机器人智能作业领域具有较大的实用价值,特别是当机器人的作业 目标是未知参数目标时,本发明的目标旋转检测方法可以辅助机器人对目标的操作状态进 行感知,进而在一定程度上可以提升机器人对未知参数目标的智能操作水平。 下面结合附图并通过











