
技术摘要:
本申请涉及人机交互技术领域,具体而言,涉及一种人机交互设备、方法及计算机可读存储介质。本申请实施例提供的人机交互设备包括处理组件和摄像组件,处理组件与摄像组件连接。处理组件用于采集人机交互设备所在环境的语音信息,并确定出语音信息对应的语音方位,以根 全部
背景技术:
人机交互是一门研究系统与目标用户之间交互关系的学问,人机交互系统可以是 各种各样的机器(人机交互设备),也可以是计算机化的系统和软件。对于人机交互设备而 言,现有技术中,其通常是固定设置的机器设备,例如,会议影音设备、银行业务办理设备、 车站订票设备等,在现有人机交互设备的使用过程中,目标用户需要固定在人机交互设备 的某一定点位置,例如,面向人机交互设备中摄像组件的位置,如此,才能够实现目标用户 与人机交互设备的正常交互行为,因此,现有技术中,人机交互设备的自动化程度相对较 弱。
技术实现要素:
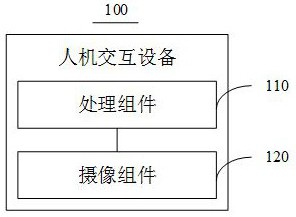
本申请的目的在于,提供一种人机交互设备、方法及计算机可读存储介质,以解决 上述问题。 第一方面,本申请提供的人机交互设备,包括处理组件和摄像组件,处理组件与摄 像组件连接; 处理组件用于采集人机交互设备所在环境的语音信息,并确定出语音信息对应的语音 方位,以根据语音方位生成旋转控制指令,并将旋转控制指令发送给摄像组件; 摄像组件用于根据旋转控制指令执行旋转动作,以将摄像组件的拍摄面旋转至与语音 方位对应的第一目标位置处,并采集第一目标位置处的场景图像。 结合第一方面,本申请实施例还提供了第一方面的第一种可选的实施方式,处理 组件包括语音采集装置和处理器件,语音采集装置与处理器件连接,处理器件还与摄像组 件连接; 语音采集装置用于采集人机交互设备所在环境的语音信息,并确定出语音信息对应的 语音方位,以将语音方位发送给处理器件; 处理器件用于根据语音方位生成旋转控制指令,并将旋转控制指令发送给摄像组件。 结合第一方面,本申请实施例还提供了第一方面的第二种可选的实施方式,人机 交互设备还包括第一显示器件,第一显示器件与处理组件连接; 摄像组件还用于将场景图像发送给处理组件; 处理组件还用于从场景图像中确定出第一人物图像,以根据第一人物图像生成目标显 示图像,并将目标显示图像发送给第一显示器件; 第一显示器件用于对目标显示图像进行显示。 在上述实施方式中,人机交互设备还包括第一显示器件,第一显示器件与处理组 件连接,而摄像组件还用于将场景图像发送给处理组件,处理组件还用于从场景图像中确 5 CN 111741225 A 说 明 书 2/8 页 定出第一人物图像,以根据第一人物图像生成目标显示图像,并将目标显示图像发送给第 一显示器件,第一显示器件则用于对目标显示图像进行显示,从而增强目标用户与人机交 互设备的可互动性。 结合第一方面的第二可选的实施方式,本申请实施例还提供了第一方面的第三种 可选的实施方式,处理组件用于从场景图像中确定出第一人物图像,以及第一人物图像的 第一表情信息,以根据第一表情信息模拟出第二人物图像,作为目标显示图像,并将目标显 示图像发送给第一显示器件。 结合第一方面,本申请实施例还提供了第一方面的第四种可选的实施方式,处理 组件还与第二显示器件连接; 处理组件还用于从场景图像中确定出第一人物图像,并将第一人物图像发送给第二显 示器件; 第二显示器件用于对第一人物图像进行显示。 在上述实施方式中,处理组件还与第二显示器件连接,而处理组件还用于从场景 图像中确定出第一人物图像,并将第一人物图像发送给第二显示器件,第二显示器件则用 于对第一人物图像进行显示,如此,人机交互设备便能够应用到远程会议系统中,从而提高 人机交互设备的可应用范围。 结合第一方面的第四种可选的实施方式,本申请实施例还提供了第一方面的第五 种可选的实施方式,处理组件用于从场景图像中确定出第一人物图像之后,获取与第一人 物图像对应的人物身份信息,并将第一人物图像和人物身份信息发送给第二显示器件; 第二显示器件用于对第一人物图像和人物身份信息进行显示。 结合第一方面的第二种、第三种、第四种或第五种可选的实施方式,本申请实施例 还提供了第一方面的第六种可选的实施方式,处理组件从场景图像中确定出第一人物图像 之后,还用于从第一人物图像中确定出目标人脸,以及确定出目标人脸在场景图像中的位 置信息,以根据位置信息生成微调指令,并将微调指令发送给摄像组件; 摄像组件用于根据微调指令执行微调动作,以将摄像组件的拍摄面调整至与第一人物 图像对应的第二目标位置处。 结合第一方面的第六种可选的实施方式,本申请实施例还提供了第一方面的第七 种可选的实施方式,摄像组件包括第一旋转控制部件和摄像头,第一旋转控制部件和摄像 头分别与处理组件连接; 第一旋转控制部件用于接收微调指令,并根据微调指令执行微调动作,以带动摄像头 在第一方向上旋转,将摄像头的拍摄面调整至与第一人物图像对应的第二目标位置处,第 一方向为竖直方向。 结合第一方面,本申请实施例还提供了第一方面的第八种可选的实施方式,摄像 组件包括第二旋转控制部件和摄像头,第二旋转控制部件和摄像头分别与处理组件连接; 第二旋转控制部件用于接收旋转控制指令,并根据旋转控制指令执行旋转动作,以带 动摄像头在第二方向上旋转,将摄像头的拍摄面旋转至与语音方位对应的第一目标位置 处,第二方向为水平方向。 结合第一方面,本申请实施例还提供了第一方面的第九种可选的实施方式,人机 交互设备还包括收纳壳和升降控制组件,升降控制组件分别与处理组件和摄像组件连接; 6 CN 111741225 A 说 明 书 3/8 页 处理组件还用于在接收到开机控制指令或关机控制指令时,将开机控制指令或关机控 制指令发送给升降控制组件; 升降控制组件用于在接收到开机控制指令时,控制摄像组件从收纳壳中升起,以暴露 于收纳壳的外部,以及用于在接收到关机控制指令时,控制摄像组件从暴露于收纳壳外部 的位置处,收纳至收纳壳的内部。 结合第一方面,本申请实施例还提供了第一方面的第十种可选的实施方式,人机 交互设备还包括投影主机,投影主机与处理组件连接; 摄像组件还用于将场景图像发送给处理组件; 处理组件还用于从场景图像中确定出投影区域特征图像,并通过线性滤波差分法对投 影区域特征图像进行颜色分割,获得特征区域; 处理组件还用于根据特征区域,进行特征点匹配,并根据特征点匹配结果,对投影主机 的投影画面进行梯形校正。 结合第一方面的第十种可选的实施方式,本申请实施例还提供了第十方面的第十 一种可选的实施方式,线性滤波差分法可以通过以下计算公式表示: 其中,f为线型滤波的差分值,c表示差分增量,o表示滤波范围,L表示光强值,i表示按 行扫描的像素值索引值。 第二方面,本申请实施例提供的人机交互方法,应用于上述第一方面,或第一方面 的任意一种可选的实施方式所提供的人机交互设备; 通过处理组件采集人机交互设备所在环境的语音信息,并确定出语音信息对应的语音 方位,以根据语音方位生成旋转控制指令,并将旋转控制指令发送给摄像组件; 通过摄像组件根据旋转控制指令执行旋转动作,以将摄像组件的拍摄面旋转至与语音 方位对应的第一目标位置处,并采集第一目标位置处的场景图像。 第三方面,本申请实施例还提供了一种计算机可读存储介质,计算机可读存储介 质上存储有计算机程序,计算机程序被执行时,实现上述第二方面所提供的人机交互方法。 本申请实施例提供的人机交互设备包括处理组件和摄像组件,处理组件用于采集 人机交互设备所在环境的语音信息,并确定出语音信息对应的语音方位,以根据语音方位 生成旋转控制指令,并将旋转控制指令发送给摄像组件,而摄像组件则用于根据旋转控制 指令执行旋转动作,以将摄像组件的拍摄面旋转至与语音方位对应的第一目标位置处,并 采集第一目标位置处的场景图像,其中,语音信息可以由目标用户发出,因此,摄像组件便 能够自动旋转至目标用户所在位置处,也即,第一目标位置处,从而实现目标用户与人机交 互设备的正常交互行为,从而提高了人机交互设备的自动化程度。 本申请提供的人机交互设备及计算机可读存储介质具有与上述第一方面所提供 的人机交互设备相同的有益效果,此处不作赘述。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使 用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看 7 CN 111741225 A 说 明 书 4/8 页 作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他相关的附图。 图1为本申请实施例提供的一种人机交互设备的示意性结构框图。 图2为本申请实施例提供的人机交互设备的另一种示意性结构框图。 图3为本申请实施例提供的一种人机交互设备的结构示意图。 图4为本申请实施例提供的人机交互设备的另一种示意性结构框图。 图5为本申请实施例提供的人机交互设备的另一种示意性结构框图。 图6为本申请实施例提供的人机交互设备的另一种结构示意图。 图7为本申请实施例提供的一种人机交互方法的步骤流程图。 附图标记:100-人机交互设备;110-处理组件;111-语音采集装置;112-处理器件; 120-摄像组件;121-第一旋转控制部件;122-摄像头;123-第二旋转控制部件;130-底座; 140-第一显示器件;150-投影主机。











