
技术摘要:
本发明公开了一种应用于隧道的基于MESH网络的智能救灾车辆,包括救灾车辆本体、MESH网络中转设备、灭火器、喷嘴、红外传感器、调节装置及摄像头以及用于提供电能的电池组,救灾车辆本体的前侧、后侧、左侧及右侧均设置有烟雾传感器,救灾车辆本体的前侧设置有第一超声 全部
背景技术:
电缆沟道使电力系统中最具代表性的消防难点,设备、设施能否安全运行,关键就 在电缆的安全。电缆沟道中一旦发生火灾,人员很难进入扑救。防灭电缆火灾的传统做法是 在这些场所做防火分区和封堵,一旦发生问题可使损失减小在一个防火分区内,这种方法 无法主动灭火。另一种方法是采用灭火保护装置,传统的喷淋系统最低需要68度(红色玻璃 球喷淋头)才能启动,此时火焰已经比较明显,难以控制,另一方面喷淋系统要求挖水池,敷 设管道,再加上电控装置、高压水泵等设备,其造价高,而且维护费用也很高。传统的灭火小 车传输摄像头视频信息采用的是传统WiFi形式或者有线形式,在火灾发生时,视频线缆存 在断裂风险。电缆沟道中的固定路由节点失效也将导致链路中断,均无法保证视频信号的 可靠传递,即视频监控系统没有自组织自恢复的能力。所以需要一种能够自动发现火源,有 针对地进行起火点灭火,尽可能减少损失,参与网络具有自组织自恢复的适应性强的灭火 装置。
技术实现要素:
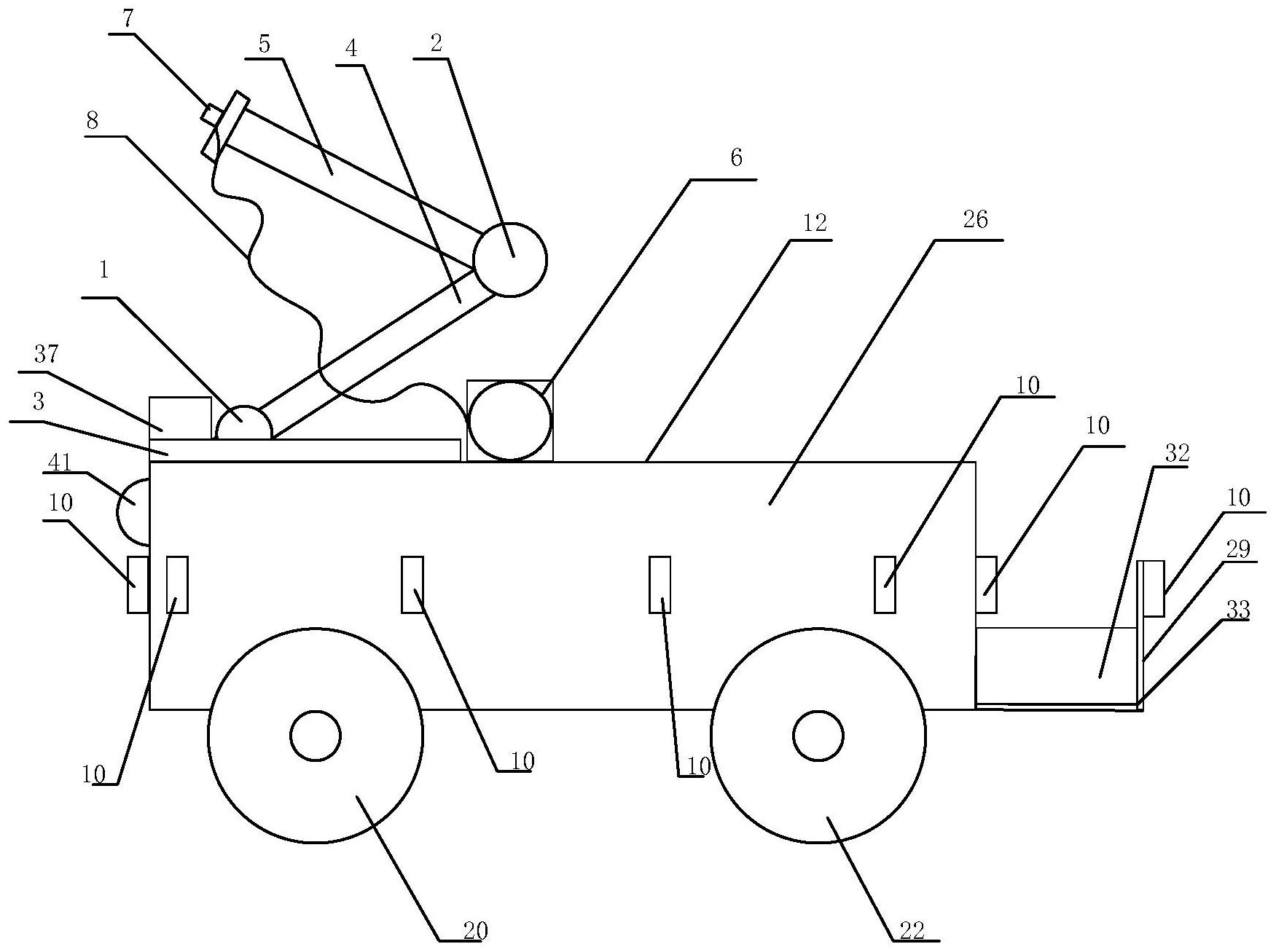
本发明的目的在于克服上述现有技术的缺点,提供了一种应用于隧道的基于MESH 网络的智能救灾车辆,该救灾车辆的灭火效果较好,且信息传输稳定,同时适应性较强。 为达到上述目的,本发明所述的应用于隧道的基于MESH网络的智能救灾车辆包括 救灾车辆本体、MESH网络中转设备、灭火器、喷嘴、红外传感器、调节装置及摄像头以及用于 提供电能的电池组, 救灾车辆本体的前侧、后侧、左侧及右侧均设置有烟雾传感器,救灾车辆本体的前 侧设置有第一超声波距离传感器及雾灯,救灾车辆本体的后侧设置有第二超声波距离传感 器,灭火器、红外传感器、调节装置及摄像头均设置于救灾车辆本体上,喷嘴设置于调节装 置上,灭火器的出口经阀门与喷嘴的入口相连通,MESH网络中转设备固定于救灾车辆本体 上,中心控制器与MESH网络中转设备、烟雾传感器的输出端、第一超声波距离传感器的输出 端、第二超声波距离传感器的输出端、灭火器的角行程执行器的控制端、红外传感器的输出 端、调节装置的控制端、摄像头的输出端及救灾车辆本体的控制端相连接。 救灾车辆本体包括底板、不锈钢平台、设置于底板底部的左前置麦克纳姆轮、右前 置麦克纳姆轮、左后置麦克纳姆轮、右后置麦克纳姆轮、第一直流驱动电机、第二直流驱动 电机、第三直流驱动电机及第四直流驱动电机,其中,第一直流驱动电机的输出轴与左前置 麦克纳姆轮相连接,第二直流驱动电机的输出轴与右前置麦克纳姆轮相连接,第三直流驱 动电机的输出轴与左后置麦克纳姆轮,第四直流驱动电机的输出轴与右后置麦克纳姆轮相 连接,第一直流驱动电机的控制端、第二直流驱动电机的控制端、第三直流驱动电机的控制 4 CN 111544810 A 说 明 书 2/5 页 端及第四直流驱动电机的控制端与中心控制器相连接,底板的前端设置有前置板,底板的 后端设置有后置板,底板的左端设置有左侧板,底板的右端设置有右侧板,不锈钢平台位于 底板的上方,且不锈钢平台的底部与前置板、后置板、左侧板及右侧板相连接; 各烟雾传感器设置于前置板上、后置板上、左侧板上及右侧板上; 第一超声波距离传感器及雾灯设置于前置板上,第二超声波距离传感器设置于后 置板上; 灭火器、红外传感器、调节装置及摄像头设置于不锈钢平台上。 所述调节装置包括机械臂底座、第一机械臂、第二机械臂、用于驱动第一机械臂在 竖平面内转动的第一进步电机以及用于驱动第二机械臂在竖平面内转动的第二步进电机, 其中,机械臂底座固定于不锈钢平台上,第一机械臂的下端连接于机械臂底座上,第一机械 臂的上端与第二机械臂的下端相连接,喷嘴设置于第二机械臂的上端,第一步进电机的控 制端及第二步进电机的控制端均与中心控制器相连接。 还包括控制步进电机、从动轮、连杆、撞块及压缩弹簧,其中,底板上设置有内置 仓,内置仓的一端开口,MESH网络中转设备位于内置仓内,MESH网络中转设备通过压缩弹簧 与内置仓中未开口的一端相连接,控制步进电机的输出轴与从动轮相连接,连杆的一端与 从动轮相连接,连杆的另一端与撞块相连接,撞块位于内置仓的开口位置处,压缩弹簧弹出 MESH网络中转设备后,通过撞块对MESH网络中转设备进行限位,控制步进电机的控制端与 中心控制器相连接。 电池组为锂电池组。 灭火器通过连接软管与喷嘴相连通。 本发明具有以下有益效果: 本发明所述的应用于隧道的基于MESH网络的智能救灾车辆在具体操作时,中心控 制器通过摄像头及红外传感器采集现场的视频信息,然后通过MESH网络中转设备发送至远 程的上位机中,使得远程操控人员可以观看到隧道内的实时视频,同时远程操作人员通过 MESH网络中转设备向中心控制器发送命令,以实现对中心控制器的控制,信息传输较为稳 定,另外,中心控制器通过各烟雾传感器获取环境中的烟雾浓度,并根据各烟雾传感器获取 的环境中的烟雾浓度判断着火点的方位,以控制救灾车辆本体的行进方向,同时通过第一 超声波距离传感器和第二超声波距离传感器获障碍物与救灾车辆本体之间的距离,当救灾 车辆与障碍物之间的距离小于预设距离时,则控制救灾车辆本体转动,并通过红外传感器 检测的数据使得救灾车辆本体对准火源,然后通过调节装置调节喷嘴的位置,使得喷嘴正 对火焰,最后再通过喷嘴将灭火介质喷向火焰,实现灭火,灭火效果较好,且适应性较强。 附图说明 图1为本发明的正视图; 图2为本发明的后视图; 图3为本发明的仰视图; 图4为本发明的内部示意图。 其中,1为第一步进电机、2为第二步进电机、3为机械臂底座、4为第一机械臂、5为 第二机械臂、6为灭火器、7为喷嘴、8为连接软管、9为角行程执行器、10为烟雾传感器、11为 5 CN 111544810 A 说 明 书 3/5 页 底板、12为不锈钢平台、13为电池组、14为中心控制器、15为第一MESH通信模块、16为第一直 流驱动电机、17为第二直流驱动电机、18为第三直流驱动电机、19为第四直流驱动电机、20 为左前置麦克纳姆轮、21为右前置麦克纳姆轮、22为左后置麦克纳姆轮、23为右后置麦克纳 姆轮、24为第一超声波距离传感器、25为第二超声波距离传感器、26为左侧板、27为右侧板、 28为前置板、29为后置板、30为内置仓、31为MESH网络中转设备、32为撞块、33为挡板、34为 连杆、35为从动轮、36为控制步进电机、37为摄像头、38为红外传感器、39为压缩弹簧、40为 第二MESH通信模块、41为雾灯。











