
技术摘要:
本发明涉及一种基于前视声呐图像的水下目标跟踪方法,能够准确跟踪水下目标的位置,进行水下目标实时快速检测,将GPS、姿态传感器、云台、PC、前视声纳设备安装调试完成;通过PC控制云台在探测范围内运动,并给定跟踪目标;获取信息数据;根据前视声纳回拨信号的强度将 全部
背景技术:
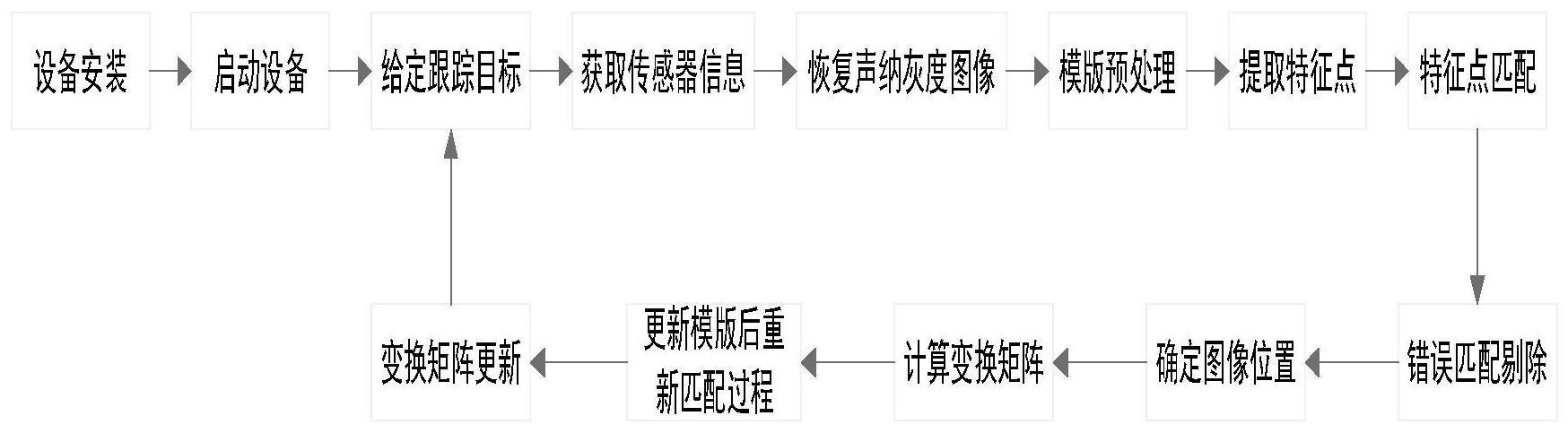
本发明的目的在于提供一种基于前视声呐图像的水下目标跟踪方法,准确跟踪目 标的位置,而且检测速度快,具有实时性的特点。 为达上述目的,本发明采用下述技术方案: 一种基于前视声呐图像的水下目标跟踪方法,包括图像预处理、基于FAST和ORB算 法的声纳图像特征点提取、声纳图像匹配、基于GMS算法的错误匹配点剔除、基于网格框架 的快速模板定位等几个关键部分。其次,在专利权人的发明专利《前视声纳图像拼接方法和 系统》(专利申请号201010215541.8)的基础上,实现水下目标跟踪,步骤如下: (1)将GPS、姿态传感器以及云台安装在船上:云台安装在船头支架上,其水平旋转 面与船甲板面平行,旋转中心尽量在船体中轴线上,GPS安装在船体中心位置,姿态传感器 安装位置要保证其中心线与船体中轴线重合。云台控制器和PC放置在船上,计算机通过串 口联线连接到云台控制器、姿态传感器和GPS,并通过网线连接前视声纳。 (2)启动PC、GPS、姿态传感器设备、云台、前视声纳;检查各部分数据链路通讯是否 正常。 8 CN 111596296 A 说 明 书 2/8 页 (3)通过PC控制云台在探测范围内运动,并给定跟踪目标。 (4)同时获取各个传感器的信息数据,包括以下四种传感器信息: ①从串口读取云台反馈的姿态信息; ②从串口读取姿态传感器发送的船体姿态信息; ③从串口读取GPS信息; ④从网络读取声纳回波信息。 (5)根据前视声纳回拨信号的强度将声纳信息恢复为声纳的灰度图像。 从声纳介绍到的信号为采样点声波的回波强度,将回波强度看作图像的灰度值, 即可得到声纳的灰度图像,变换公式如下: I(x,y)=F(S(i,j)); 其中,I(x,y)为声纳图像在(x,y)的灰度,S(i,j)为声纳信号在(i,j)的回波强度, F(x)为变换方程。 (6)从获取的声纳图像中选取目标作为模板图像,然后把下一声的声纳图像作为 待搜索图像,将两个图像都进行必要的预处理。 (7)首先利用基于模板和机器学习的角点检测算法FAST快速提取特征点,再利用 ORB算法在找到较优的前n个特征点后使用灰度质心方法为FAST找到的特征点添加主方向, 以快速计算精确的主方向分量,得到两组特征点集合。 (8)将两个特征点集合进行匹配,输出为一个特征点对集合Q,表示两个特征点集 合中点的对应关系。匹配算法包括BF算法和FLANN算法。 (9)匹配后得到若干个特征点,再利用优化后的GMS算法将这些特征点的正确匹配 与错误匹配分离开来。GMS算法将运动平滑度作为一个统计量,能够对误匹配点进行剔除。 (10)采用网格框架来计算网格中的特征点数,从而得到有效分数最大的区域,也 即目标图像。 (11)通过传感器信息计算出当前目标图像变换到大地坐标下的变换矩阵T。 (12)根据该变换矩阵T,就可以知道大地坐标系投影平面的每个像素点与当前声 纳图像中的像素点的变换关系;将当前匹配结果作为模板图像,下一声的声纳图像作为待 搜索图像,重复匹配过程,再经过获取四种传感器信息,经过坐标变换计算出当前匹配结果 变换到大地坐标下的变换矩阵T*。 (13)将新计算的变换矩阵T*替换变换T,得到当前的目标位置的变换矩阵。 (14)重复(3)~(13)即可实现基于前视声纳图像匹配的水下目标跟踪。 本发明具有如下显而易见的突出特点和显著优点: 本发明提供了一种基于前视声呐图像的水下目标跟踪方法,实现前视声纳DIDSON 图像匹配跟踪目标。通过云台运动参数,GPS和惯性传感器信号计算出目标的位置信息,并 进行实时跟踪。这种方法避免了水下复杂光学环境和水下运动目标特性的影响,降低了跟 踪过程中目标偏离和丢失的可能。使用ORB和GMS算法避免了传统模板匹配算法的鲁棒性差 或是低时效性的特点,提高了图像匹配的实时性。 附图说明 图1为本发明方法的算法流程图。 9 CN 111596296 A 说 明 书 3/8 页 图2为坐标关系图。
技术实现要素:
下面结合附图,对本发明的具体实施例如下详述。 实现目标跟踪的步骤是: (1)将GPS、姿态传感器以及云台安装在船上;云台安装在船头支架上,其水平旋转 面与甲板平行,旋转中心尽量在船的中轴线上,GPS安装在船体中心位置,姿态传感器安装 位置要保证其中心线与船体中轴线重合。云台控制器和PC放置在船上,连接各部分的数据 线。 (2)启动PC、GPS、姿态传感器、云台、前视声纳;检查各部分数据链路通讯是否正 常。 (3)通过PC控制云台在探测范围内运动,并给定跟踪目标。 (4)同时获取各个传感器的信息数据,包括以下四种传感器信息: ①从串口读取云台反馈的姿态信息; ②从串口读取姿态传感器发送的船体姿态信息; ③从串口读取GPS信息; ④从网络读取声纳回波信息。 (5)根据前视声纳回拨信号的强度将声纳信息恢复为声纳的灰度图像;从声纳接 收到的信号为采样点声波的回波强度,将回波强度看作图像的灰度值,即可得到声纳的灰 度图像,变换公式如下: I(x,y)=F(S(i,j)); 其中,I(x,y)为声纳图像在(x,y)的灰度,S(i,j)为声纳信号在(i,j)的回波强度, F(x)为变换方程。 (6)从获取的声纳图像中选取目标作为模板图像,然后把下一声的声纳图像作为 待搜索图像,将两个图像都进行必要的预处理。 (7)首先利用基于模板和机器学习的角点检测算法FAST快速提取特征点,再利用 ORB算法在找到较优的前n个特征点后使用灰度质心方法为FAST找到的特征点添加主方向, 以快速计算精确的主方向分量。图像角点区域的灰度矩可以表示为: 其中,x和y的取值范围在半径为S的领域中,I(x,y)为图像中图像坐标为(x,y)处 像素点的灰度值,p和q决定了图像的阶数,于是灰度矩心c就可由三个不同灰度矩m00、m01和 m10来表示: 此时可判定特征地点的主方向为: θ=arctan(m01,m10) (8)在特征点的周围选取n个特征点对,并且将这些点对的比对结果组合起来作为 10 CN 111596296 A 说 明 书 4/8 页 描述子,利用BRIEF算法进行有限的可比点对,从而进行灰度值之间的比较: 其中,p(x)是特征点周围的图像领域在x=(u,v)T处的灰度值。选择n个特征点对 就确定了一个长度为n的二进制比特串,如下式: ORB算法是针对BRIEF算法的缺点进行改进来实现特征点描述的。BRIEF对平面旋 转非常敏感,ORB将所提取的角点主方向应用于BRIEF,将其改进为具备旋转不变性的 rBRIEF(Rotated BRIEF)。BRIEF算法本身是不具有方向不变性的,为解决图像发生旋转所 带来的方向问题,ORB算法中使用可旋转的BRIEF算子,即尝试用之前特征点检测时算出的 主方向θ,得到其对应的旋转矩阵Rθ,与n对特征点对组成的矩阵进行校正,矩阵形式如下 式: 对矩阵进行旋转变换,旋转角度为角点的主方向,得到Qθ=RθQ,其中旋转矩阵Rθ 为: 这样,ORB便为每一个特征点获取了256位二进制字符串。之后可通过计算两个特 征点之间的汉明距离来表示两者的相似性。两幅图像特征点描述向量之间的汉明距离越 小,说明两个特征点越相似。匹配完成后后得到一个含若干个特征点对的集合。 (9)再利用优化后的GMS算法将这些特征点的正确匹配与错误匹配分离开来。GMS 算法将运动平滑度作为一个统计量,能够对误匹配点进行剔除。 图像对{Ia,Ib}分别有{N,M}数量的特征点,χ={x1,x2,K,xi,K,xN}是通过BF算法匹 配得到的两幅图像的特征点匹配,并且数量为|χ|=N。该模型提出的目标就是将这N个特征 点对中正确和错误的点对区分开来。{a,b}为图像对{Ia,Ib}内的一对区域,分别包含{n,m} 个特征点对, 是两幅图像特征点对在{a,b}区域内的一个子集,所以特征点对的相似 性度量方法Si可定义为: Si=|χi|-1 其中,-1表示在{a,b}内去掉原始的一个特征点对。 由于区域{a,b}很小,作者将考虑的因素限制在理想化的真假区域对,从而忽略了 部分相似的位置。定义fa为区域a中的有效特征点之一,fa是正确特征点的概率为t,可表示 为式: 在此基础上比较{a,b}处于相同或者不同位置时导出区域间点对的到达率。 如下式所示,考虑到特征点fa有可能出现错误匹配,那么在匹配错误的情况下,图 像Ib中与其匹配的点可能是M个特征点当中的任意一个。 11 CN 111596296 A 说 明 书 5/8 页 其中, 表示fa的最近邻特征点位于区域b这一事件, 表示fa匹配错误,该事件 发生的概率为1-t,m表示区域b内特征点的数量,M表示图像Ib中特征点的数量,β是避免区 域内窗口重叠等重复结构的干扰而添加的影响因子。 若Tab表示{a,b}所对应的区域是真实世界中相同的区域,而Fab表示{a,b}所对应 的区域是不同的区域。定义概率 表示在{a,b}是相同的区域的情况下,特征 点fa的最近邻位于区域b内的条件概率,则: 上式表示理解为条件概率 是由两部分构成:一部分是在{a,b}是相 同的区域的情况下,匹配正确;还有一部分是匹配错误的情况下,特征点fa的最近邻仍然位 于区域b内。也就是说, 这一事件的发生有两种可能性:第一种可能是fa正确匹配,第二种 可能是虽然fa匹配出错,但是其匹配点碰巧落在了区域b内。 定义概率 表示在{a,b}是不同区域的情况下,特征点fa的最近邻位 于区域b内的条件概率,则: 通过观察上式可以发现,当Fab发生时, 是 的一个子集,即当{a,b}所对应的 区域是不同的区域时,特征点fa的最近邻位于区域b内,则fa匹配一定是错误的,反之不成 立。 由于每个特征点的匹配是相对独立的,所以xi周围区域的特征点对数量Si可以近 似为以下分布: 上式表现了xi是正确匹配或者错误匹配时,其周围区域特征点对数量分布将呈现 巨大的差异性。基于两种情况下分布的差异性,该模型将特征点周围区域的匹配数量作为 12 CN 111596296 A 说 明 书 6/8 页 统计度量方法,用以区分某个特征点匹配是否正确。 (10)采用网格框架来计算网格中的特征点数,将模板图像与待搜索图像通过特征 点算法匹配完之后,得到了被搜索图像中的有效特征点集合Q。同样是利用Q来进行模板匹 配,与之前方法的差别在于,首先将待搜索图像都分格成网格状,然后统计每个网格中的特 征点数目。每个网格中包含的特征点的数量就是该网格中心坐标的权值,如下式所示: 其中,(Cix,Ciy)是网格i的中点坐标,ni表示的是该网格包含的特征点的数目。tx和 ty分别表示模板定位的中心位置的x坐标和y坐标。 这样,通过统计被搜索图像中与模板图像匹配的特征点的位置信息来确定模板的 最终位置,也即目标图像的位置。 (11)通过传感器信息计算出当前目标图像变换到大地坐标下的变换矩阵T。坐标 关系如图2所示,其中XYZO为大地坐标系,船体坐标系为X1Y1Z1O1,它在大地坐标系下的变换 矩阵可以通过GPS以及姿态传感器MAHRS测量出来,假设GPS测量出来的位置坐标为(x,y, z),MAHRS测量出来的船体的三个方向的姿态角度(航向,俯仰,横滚)为(ψ,θ,φ),那么船体 在大地坐标系下的变换矩阵为; 云台固定安装在船上,如图2中X2Y2Z2O2坐标系,云台的姿态通过PC进行控制,云台 想对于船的变换矩阵可以写为: 其中(α,β,λ)为云台相对于船体的姿态角度,角度包含了云台的安装角度以及控 制角度,(Δx,Δy,Δz)为云台相对于船体坐标系的位置,这个是由云台的安装位置来决定 的,可以通过测量得到;云台与声纳固定安装在一起,可以认为云台的位置和姿态就越是声 纳设备的位置和姿态。那么当前声纳在世界坐标系下的位置和姿态就可以通过下面的公式 计算, 13 CN 111596296 A 说 明 书 7/8 页 其中δx,δy,δz就是声纳图像在大地坐标系下的位置,矩阵 为声纳在大地坐标系下的姿态。因此这里问题的关键就是要把声纳当前姿态下的图像,投 影子啊姿态与大地坐标一致,即旋转矩阵为 位置为(0,0,-δz)的坐标系啊下,即 坐标系为X3Y3Z3O3。 图2中在声纳坐标系下即在X2Y2Z2O2坐标系下,P(x2,y2,z2)点在声纳DIDSON是成像 点坐标为(u,v),根据声纳的成像原理,它成像坐标变换为: 其中 η为OP向量与成像平面的夹角。那么同 一点在X3Y3Z3O3坐标系下的变换为: 公式可以写为: 那么由此可以得到: (12)根据该变换矩阵T,就可以知道大地坐标系投影平面的每个像素点与当前声 纳图像中的像素点的变换关系;将当前匹配结果作为模板图像,下一声的声纳图像作为待 搜索图像,重复匹配过程,再经过获取四种传感器信息,经过坐标变换计算出当前匹配结果 变换到大地坐标下的变换矩阵T*。 (13)将新计算的变换矩阵T*替换变换T,得到当前的目标位置的变换矩阵。 (14)重复(3)~(13)即可实现基于前视声纳图像匹配的水下目标跟踪。 上面对本发明实施例结合附图进行了说明,但本发明不限于上述实施例,还可以 根据本发明的发明创造的目的做出多种变化,凡依据本发明技术方案的精神实质和原理下 做的改变、修饰、替代、组合或简化,均应为等效的置换方式,只要符合本发明的发明目的, 14 CN 111596296 A 说 明 书 8/8 页 只要不背离本发明污泥原位处理的智能加药系统的技术原理和发明构思,都属于本发明的 保护范围。 15 CN 111596296 A 说 明 书 附 图 1/1 页 图1 图2 16











