
技术摘要:
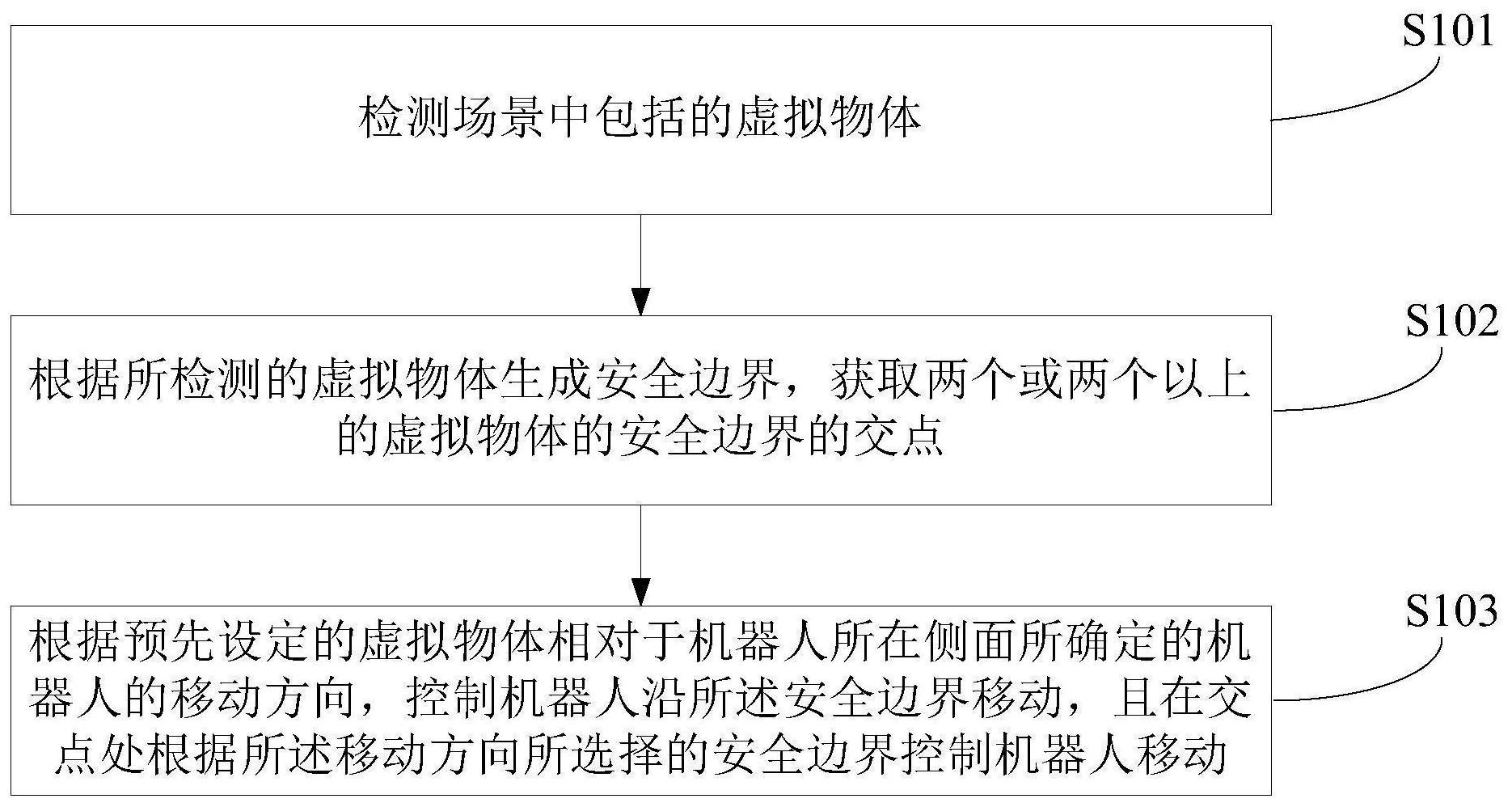
一种机器人的移动控制方法包括:检测场景中包括的虚拟物体;根据所检测的虚拟物体生成安全边界,获取两个或两个以上的虚拟物体的安全边界的交点;根据预先设定的虚拟物体相对于机器人所在侧面所确定的机器人的移动方向,控制机器人沿所述安全边界移动,且在交点处根据 全部
背景技术:
随着智能技术的发展,机器人应用越来越广泛,通过机器人可以智能地完成各种 任务。包括如扫地机器人、巡逻机器人、语音播报机器人等。当机器人在执行任务时,可能会 存在机器人没有探测到的障碍物,或者会存在其它禁止机器人移动的虚拟物体,比如不可 离开的禁区、不可进入的禁区或虚拟墙等。 当场景中仅存在多个虚拟物体时,机器人根据现有的避障算法,可能无法有效的 在包括多个虚拟物体的场景中执行任务,不利于保障机器人的安全性。
技术实现要素:
有鉴于此,本申请实施例提供了一种机器人及其移动控制方法和装置,以解决无 法有效的在包括多个虚拟物体的场景中执行任务,不利于保障机器人的安全性的问题。 本申请实施例的第一方面提供了一种机器人的移动控制方法,所述机器人的移动 控制方法包括: 检测场景中包括的虚拟物体; 根据所检测的虚拟物体生成安全边界,获取两个或两个以上的虚拟物体的安全边 界的交点; 根据预先设定的虚拟物体相对于机器人所在侧面所确定的机器人的移动方向,控 制机器人沿所述安全边界移动,且在交点处根据所述移动方向所选择的安全边界控制机器 人移动。 结合第一方面,在第一方面的第一种可能实现方式中,在所述控制机器人沿所述 安全边界移动的步骤之前,所述方法还包括: 根据机器人所设置的虚拟物体检测装置的位置,确定机器人的移动方向。 结合第一方面的第一种可能实现方式,在第一方面的第二种可能实现方式中,所 述根据机器人所设置的虚拟物体检测装置的位置,确定机器人的移动方向的步骤包括: 当虚拟物体检测装置位于机器人前进方向的左侧时,所述移动方向为虚拟物体位 于机器人左侧时所对应的机器人的前进方向; 当虚拟物体检测装置位于机器人前进方向的右侧时,所述移动方向为虚拟物体位 于机器人右侧时所对应的机器人的前进方向。 结合第一方面、第一方面的第一种可能实现方式或第一方面的第二种可能实现方 式,在第一方面的第三种可能实现方式中,所述根据预先设定的虚拟物体相对于机器人所 在侧面所确定的机器人的移动方向,控制机器人沿所述安全边界移动的步骤包括: 当所述虚拟物体为环状区域时,获取所述环状区域对应的内安全边界和外安全边 界; 4 CN 111552286 A 说 明 书 2/8 页 当所述移动方向为虚拟物体位于机器人右侧时所对应的机器人的前进方向时,确 定机器人沿所述内安全边界的移动方向为逆时针方向,机器人沿所述外安全边界的移动方 向为顺时针方向; 当所述移动方向为虚拟物体位于机器人左侧时所对应的机器人的前进方向时,确 定机器人沿所述内安全边界的移动方向为顺时针方向,机器人沿所述外安全边界的移动方 向为逆时针方向。 结合第一方面,在第一方面的第四种可能实现方式中,所述在交点处根据所述移 动方向所选择的安全边界控制机器人移动的步骤包括: 当所述交点为第一虚拟物体第一安全边界和第二虚拟物体的第二安全边界所相 交形成的交点时,确定交点处的第一安全边界的第一移动方向和第二安全边界的第二移动 方向; 根据机器人移动方向所对应的机器人与虚拟物体的相对关系,结合第一移动方向 与第二移动方向的相对关系,确定机器人移动的安全边界。 结合第一方面,在第一方面的第五种可能实现方式中,所述方法还包括: 获取所述虚拟物体的类型; 当所述虚拟物体为不可离开禁区时,所述安全边界包括根据所述不可离开禁区所 确定的内安全边界; 当所述虚拟物体为不可进入禁区时,所述安全边界包括根据所述不可进入禁区所 确定的外安全边界。 结合第一方面,在第一方面的第六种可能实现方式中,所述机器人为扫地机器人。 本申请实施例的第二方面提供了一种机器人的移动控制装置,所述机器人的移动 控制装置包括: 虚拟物体检测单元,用于检测场景中包括的虚拟物体; 交点检测单元,用于根据所检测的虚拟物体生成安全边界,获取两个或两个以上 的虚拟物体的安全边界的交点; 移动控制单元,用于根据预先设定的虚拟物体相对于机器人所在侧面所确定的机 器人的移动方向,控制机器人沿所述安全边界移动,且在交点处根据所述移动方向所选择 的安全边界控制机器人移动。 本申请实施例的第三方面提供了一种机器人,包括存储器、处理器以及存储在所 述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实 现如第一方面任一项所述机器人的移动控制方法的步骤。 本申请实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储 介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至 7任一项所述机器人的移动控制方法的步骤。 本申请实施例与现有技术相比存在的有益效果是:对于场景中包括两个或两个以 上的虚拟物体时,根据虚拟物体生成安全边界,控制机器人沿所述安全边界移动,且虚拟物 体所确定的安全边界存在交点时,根据虚拟物体相对于机器人所在侧面所确定的机器人的 移动方向,来选择边界控制机器人移动,从而能够有效的实现机器人在多个虚拟物体的场 景中移动,提高机器人使用的安全性。 5 CN 111552286 A 说 明 书 3/8 页 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例或现有技术描述 中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些 实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些 附图获得其他的附图。 图1是本申请实施例提供的一种机器人的移动控制方法的实现流程示意图; 图2是本申请实施例提供的虚拟物体相交示意图; 图3是本申请实施例提供的虚拟物体的安全边界相交示意图; 图4是本申请实施例提供的虚拟物体在交点移动的示意图; 图5是本申请实施例提供的一种机器人移动控制装置的示意图; 图6是本申请实施例提供的机器人的示意图。











