
技术摘要:
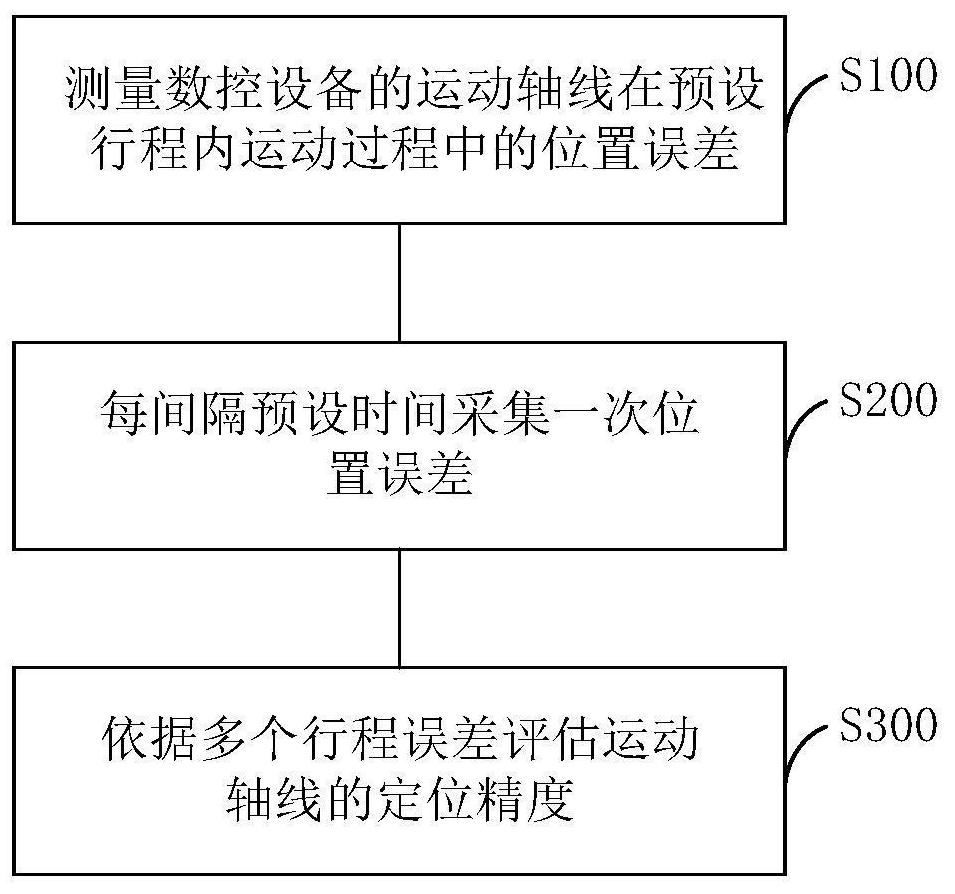
本发明的实施例提供了一种数控设备的定位精度可靠性评估方法,涉及数控设备技术领域。数控设备的定位精度可靠性评估方法包括检测数控设备的运动轴线在预设行程内运动过程中的位置误差;每间隔预设时间采集一次位置误差;依据多个位置误差评估运动轴线的定位精度。在本 全部
背景技术:
数控机床是机械制造重要的基础装备,由加工程序载体、数控装置、伺服驱动装 置、机床主体和其他辅助装置等部分构成,属机械、电子、液压、计算机、测量、微电子等一体 化的精密、复杂设备,广泛应用于汽车、航空航天、通讯、核电、轨道交通、机械制造等领域。 数控机床的定位精度的可靠性是衡量机床加工性能的一个重要指标。
技术实现要素:
本发明的目的在于提供了一种数控设备的定位精度可靠性评估方法,其能够提高 定位精度评估的可靠性。 本发明的实施例可以这样实现: 本发明实施例公开了一种数控设备的定位精度可靠性评估方法,所述数控设备的 定位精度可靠性评估方法包括: 检测所述数控设备的运动轴线在预设行程内运动过程中的位置误差; 每间隔预设时间采集一次所述位置误差; 依据多个所述位置误差评估所述运动轴线的定位精度。 在本发明可选的实施例中,所述依据多个所述位置误差评估所述运动轴线的定位 精度的步骤包括: 所述运动轴线在运动过程中,每运动间隔距离后停留间隔时间,其中,所述间隔时 间大于所述预设时间; 从多个所述位置误差中筛选出所述运动轴线在停止时采集的所述位置误差及对 应的运动轴线的位置信息; 依据多个具有所述位置信息的所述位置误差评估所述运动轴线的定位精度。 在本发明可选的实施例中,所述依据多个具有所述位置信息的所述位置误差评估 所述运动轴线的定位精度的步骤包括: 依据所述位置信息及所述位置误差绘制位置误差特性曲线; 依据所述位置误差特性曲线分析所述定位精度,评估并调整所述定位精度。 在本发明可选的实施例中,所述数控设备的定位精度可靠性评估方法还包括: 所述数控设备在所述预设行程内多次往复运动; 记录所述数控设备在一次运动时的时间信息; 依据所述时间信息及多个所述位置误差评估所述运动轴线的所述定位精度。 在本发明可选的实施例中,所述依据多个所述时间信息及多个所述位置误差评估 所述运动轴线的所述定位精度的步骤包括: 4 CN 111580455 A 说 明 书 2/6 页 从多个所述时间信息及多个所述位置误差中筛选预设位置在所述时间信息时对 应的所述位置误差; 依据具有时间信息的所述位置误差评估所述运动轴线的定位精度。 在本发明可选的实施例中,所述依据具有时间信息的所述位置误差评估所述运动 轴线的定位精度的步骤包括: 依据所述时间信息及所述位置误差绘制在所述预设位置处的时间误差特性曲线; 依据所述时间误差特性曲线分析所述定位精度,评估并调整所述定位精度。 在本发明可选的实施例中,所述预设位置为多个,所述依据具有时间信息的所述 位置误差评估所述运动轴线的定位精度的步骤还包括: 依据多个依据所述时间误差特性曲线分析所述定位精度,评估并调整所述定位精 度。 在本发明可选的实施例中,所述数控设备的定位精度可靠性评估方法包括: 在预设温度下检测所述数控设备的运动轴线在所述预设行程内运动过程中的所 述位置误差。 在本发明可选的实施例中,所述检测所述数控设备的运动轴线在运动过程中的位 置误差的步骤包括: 激光干涉仪检测所述运动轴线在运动过程中的实际行程;其中,所述激光干涉仪 的反射镜跟随所述运动轴线运动,所述激光干涉仪的光路与数控设备的运动轴线平行; 依据所述实际行程及所述预设行程计算所述位置误差。 在本发明可选的实施例中,所述激光干涉仪的最大循环次数大于所述数控设备的 运动次数。 本发明实施例的有益效果:数控设备的定位精度可靠性评估方法包括检测数控设 备的运动轴线在预设行程内运动过程中的位置误差;每间隔预设时间采集一次位置误差; 依据多个位置误差评估运动轴线的定位精度。在本发明实施例中,依据采集到的多个位置 误差评估定位精度能够提高评估的可靠性。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对 范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这 些附图获得其他相关的附图。 图1为本发明的实施例提供的数控设备的定位精度可靠性评估方法的流程图; 图2为本发明的实施例提供的数控设备的定位精度可靠性评估方法的步骤S100的 子步骤的流程图; 图3为本发明的实施例提供的数控设备的定位精度可靠性评估方法的步骤S300的 子步骤的流程图; 图4为本发明的实施例提供的数控设备的定位精度可靠性评估方法的步骤S330的 子步骤的流程图; 图5为本发明的实施例提供的数控设备的定位精度可靠性评估方法的步骤S350的 5 CN 111580455 A 说 明 书 3/6 页 子步骤的流程图; 图6为本发明的实施例提供的数控设备的定位精度可靠性评估方法的步骤S354的 子步骤的流程图; 图7为本发明的实施例提供的数控设备的定位精度可靠性评估方法在第一个一小 时内的位置误差特性曲线; 图8为本发明的实施例提供的数控设备的定位精度可靠性评估方法在第一个二小 时内的位置误差特性曲线; 图9为本发明的实施例提供的数控设备的定位精度可靠性评估方法在第二个二小 时内的位置误差特性曲线; 图10为本发明的实施例提供的数控设备的定位精度可靠性评估方法在第三个二 小时内的位置误差特性曲线。











