
技术摘要:
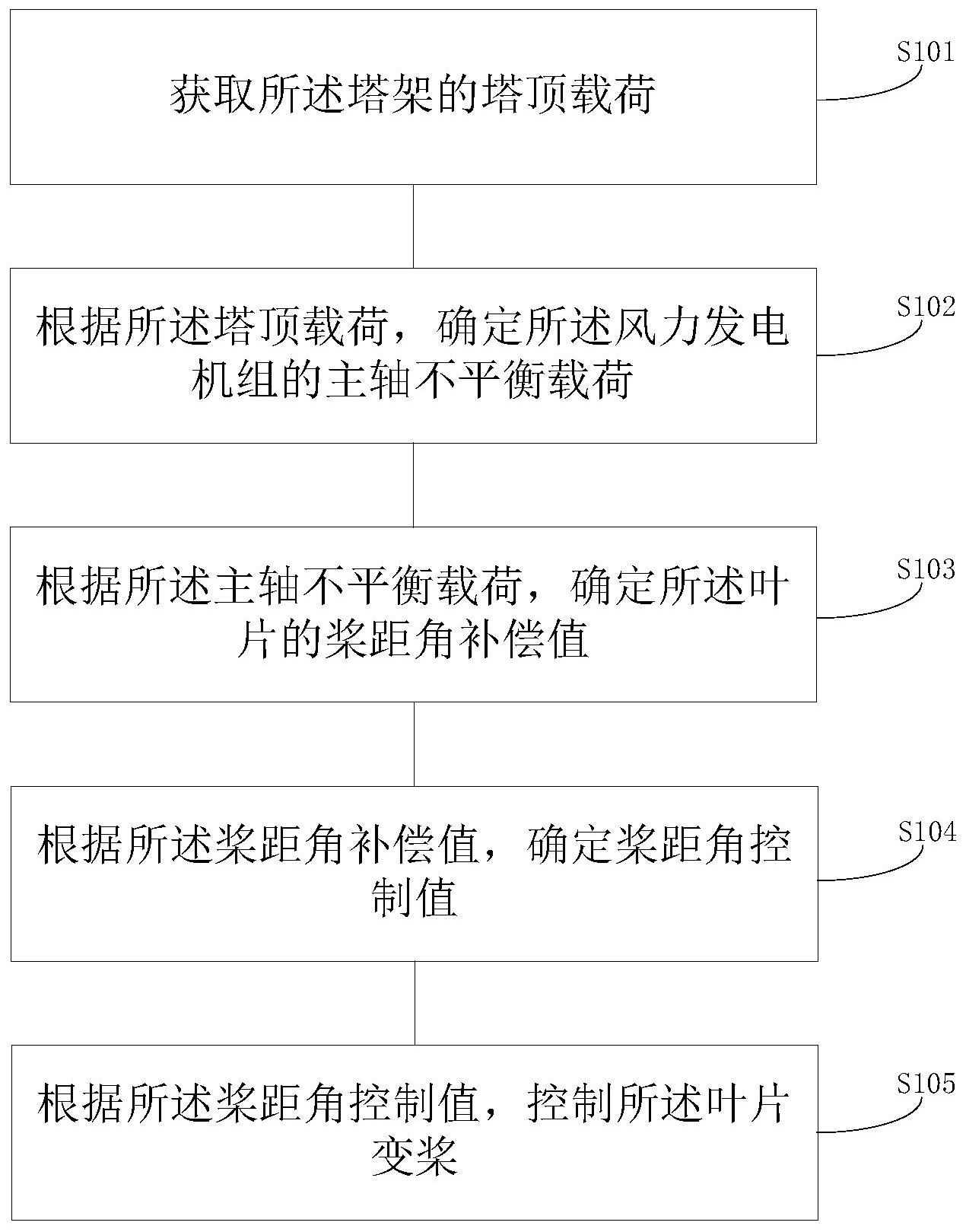
本申请提供一种风力发电机组及其控制方法和系统、计算机可读存储介质。所述方法包括:获取所述塔架的塔顶载荷;根据所述塔顶载荷,确定所述风力发电机组的主轴不平衡载荷;根据所述主轴不平衡载荷,确定所述叶片的桨距角补偿值;根据所述桨距角补偿值,确定桨距角控制 全部
背景技术:
业内习知,随着风电技术的发展,风力发电机逐渐趋向于大兆瓦、高塔架、大叶轮、 轻量化设计。对于大叶轮机组,叶根疲劳载荷、轮毂不平衡载荷和偏航的不平衡载荷会显著 增大。为实现叶轮和塔架的轻量化设计,机组需要采用独立变桨控制策略,以降低疲劳载 荷。 传统的独立变桨控制主要是借助在风机叶片根部贴装载荷传感器,通过测量叶片 根部挥舞方向和摆振方向的载荷,经过派克变换得到风轮旋转平面上的不平衡载荷。 但是叶根载荷传感器安装成本较高并且难以维护,因此需要寻找更为可靠的确定 机组不平衡的方法。
技术实现要素:
本申请提供一种风力发电机组及其控制方法和系统、计算机可读存储介质。 根据本申请实施例的第一方面,提供一种应用于风力发电机组的变桨控制方法, 所述风力发电机组包括塔架和叶片,所述方法包括: 获取所述塔架的塔顶载荷; 根据所述塔顶载荷,确定所述风力发电机组的主轴不平衡载荷; 根据所述主轴不平衡载荷,确定所述叶片的桨距角补偿值; 根据所述桨距角补偿值,确定桨距角控制值;及 根据所述桨距角控制值,控制所述叶片变桨。 可选地,所述方法包括:根据所述塔顶载荷、所述风力发电机组的重量与尺寸、所 述风力发电机组的传动链扭矩、所述风力发电机组的传动链仰角、所述风力发电机组的风 轮推力以及所述风力发电机组的机舱的偏航角度,确定所述主轴不平衡载荷。 可选地,所述方法包括:从安装在所述塔架顶部的载荷传感器获得所述塔顶载荷。 可选地,所述主轴不平衡载荷包括在dq坐标系的一个坐标轴上的第一不平衡载荷 分量和另一个坐标轴上的第二不平衡载荷分量;确定所述风力发电机组的主轴不平衡载 荷,包括: 根据所述塔顶载荷在塔顶坐标系的Z轴方向上的Z轴载荷分量、所述传动链扭矩以 及所述传动链仰角,确定所述第一不平衡载荷分量;和/或 根据所述塔顶载荷在塔顶坐标系的X轴方向上的X轴载荷分量、所述塔顶载荷在塔 顶坐标系的Y轴方向上的Y轴载荷分量、所述风力发电机组的重量与尺寸、所述传动链仰角、 所述风轮推力以及所述机舱的偏航角度,确定所述第二不平衡载荷分量。 可选地,所述方法包括:根据所述风力发电机组的功率、桨距角、环境风速以及环 4 CN 111608857 A 说 明 书 2/11 页 境空气密度,确定所述风轮推力。 可选地,根据所述风力发电机组的功率、桨距角、环境风速以及环境空气密度,确 定所述风轮推力,包括: 根据所述风力发电机组的功率、桨距角、环境风速以及环境空气密度与风轮推力 的第一关系对应表,确定所述风轮推力。 可选地,所述方法包括: 确定所述机舱的轴线在初始位置时相对于所述载荷传感器的安装轴线的相对角 度; 计算所述机舱在运行中的实测偏航角度和所述相对角度的差值,为所述偏航角 度。 可选地,确定所述机舱在初始位置时相对于所述载荷传感器的相对角度,包括: 控制所述机舱转动至少一圈; 获取所述载荷传感器在所述机舱转动过程中所测得的多个载荷值; 根据所述多个载荷值,确定所述相对角度。 可选地,根据所述主轴不平衡载荷,确定所述叶片的桨距角补偿值,还包括:确定 主轴不平衡载荷补偿量,根据所述主轴不平衡载荷和所述主轴不平衡载荷补偿量,确定所 述桨距角补偿值。 可选地,确定所述主轴不平衡载荷补偿量,包括: 根据所述风力发电机组的功率、桨距角、环境风速以及环境空气密度,确定所述主 轴不平衡载荷补偿量。 可选地,根据所述风力发电机组的功率、桨距角、环境风速以及环境空气密度,确 定所述主轴不平衡载荷补偿量,包括: 根据所述风力发电机组的功率、桨距角、环境风速以及环境空气密度与主轴不平 衡载荷补偿量的第二关系对应表,确定所述主轴不平衡载荷补偿量。 可选地,根据所述主轴不平衡载荷及所述主轴不平衡载荷补偿量,确定所述桨距 角补偿值,包括: 将所述主轴不平衡载荷减去所述主轴不平衡载荷补偿量后至少经过PI计算,确定 所述桨距角补偿值。 可选地,根据所述桨距角补偿值,确定所述桨距角控制值,包括: 获得所述风力发电机组基于转速控制的统一桨距角; 将所述桨距角补偿值经过D-Q反变换得到所述叶片的桨距角变换值; 根据所述桨距角变换值与所述统一桨距角,确定所述桨距角控制值。 可选地,获得所述风力发电机组基于转速控制的统一桨距角,包括: 根据所述风力发电机组的发电机转速和发电机转速的设定点,确定所述统一桨距 角。 根据本申请实施例的第二方面,提供一种应用于风力发电机组的变桨控制系统, 包括一个或多个处理器,用于实现如上任一项实施例所述的变桨控制方法。 根据本申请实施例的第三方面,提供一种计算机可读存储介质,其上存储有程序, 该程序被处理器执行时,实现如上任一项实施例所述的变桨控制方法。 5 CN 111608857 A 说 明 书 3/11 页 根据本申请实施例的第四方面,提供一种风力发电机组,包括: 塔架; 机舱,安装于塔架顶部; 载荷传感器,设置于所述塔架顶部,用于获取塔顶载荷; 风轮,安装于机舱,且包括轮毂和安装于轮毂的叶片; 变桨驱动装置,与所述叶片连接; 如上实施例所述的变桨控制系统,用于控制所述变桨驱动装置驱动叶片变桨。 根据本申请实施例提供的技术方案,获取塔顶载荷,根据塔顶载荷确定主轴不平 衡载荷,进而进行变桨控制,塔顶位置固定不变,塔顶安装的机舱相对塔顶的运动较少,因 此可以获得较准确的塔顶载荷和主轴不平衡载荷,从而独立变桨控制的可靠性更高。 应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不 能限制本申请。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施 例,并与说明书一起用于解释本申请的原理。 图1是本申请一示例性实施例示出的一种风力发电机组的立体结构示意图。 图2是本申请一示例性实施例示出的一种应用于风力发电机组的变桨控制方法的 流程示意图。 图3是本申请一示例性实施例示出的一种应用于风力发电机组的塔顶坐标系示意 图。 图4是本申请一示例性实施例示出的一种应用于风力发电机组的机舱与塔架的位 置关系示意图。 图5是本申请一示例性实施例示出的一种应用于风力发电机组的机舱轴线与载荷 传感器的位置关系示意图。 图6是本申请一示例性实施例示出的一种应用于风力发电机组的风轮推力的仿真 建模示意图。 图7是本申请一示例性实施例示出的一种风轮推力计算模块的建模过程示意图。 图8是本申请一示例性实施例示出的一种应用于风力发电机组的机舱的偏航角度 的确定流程示意图。 图9是本申请一示例性实施例示出的一种应用于风力发电机组的主轴不平衡载荷 补偿量的仿真建模示意图。 图10是本申请一示例性实施例示出的一种主轴不平衡载荷补偿量的计算模块的 建模过程示意图。 图11是本申请一示例性实施例示出的一种应用于风力发电机组的变桨控制方法 的控制逻辑图。 图12是本申请一示例性实施例示出的一种应用于风力发电机组的桨距角控制值 的确定流程示意图。 图13是本申请一示例性实施例示出的一种风力发电机组的变桨控制系统的结构 6 CN 111608857 A 说 明 书 4/11 页 框图。 图14是本申请另一示例性实施例示出的一种风力发电机组的变桨控制系统的结 构框图。











