
技术摘要:
本发明提供了一种六自由度模拟器气电混合控制的方法,属于训练器技术领域,包括:空气压缩机向总储气罐内充气直至储气罐的气压达到控制阀的设定值;通过气悬浮支撑单元自动监测储气罐的压力范围;当储气罐压力下降低于设定范围时,空气压缩机向总储气罐内充气;当储气 全部
背景技术:
现有的六自由度模拟训练器,多使用电动缸进行支撑及运动控制。当负载较大时, 电动缸平衡负载的消耗较大,对于电动缸的速度和精准性的控制效果不好,影响训练的使 用体验。
技术实现要素:
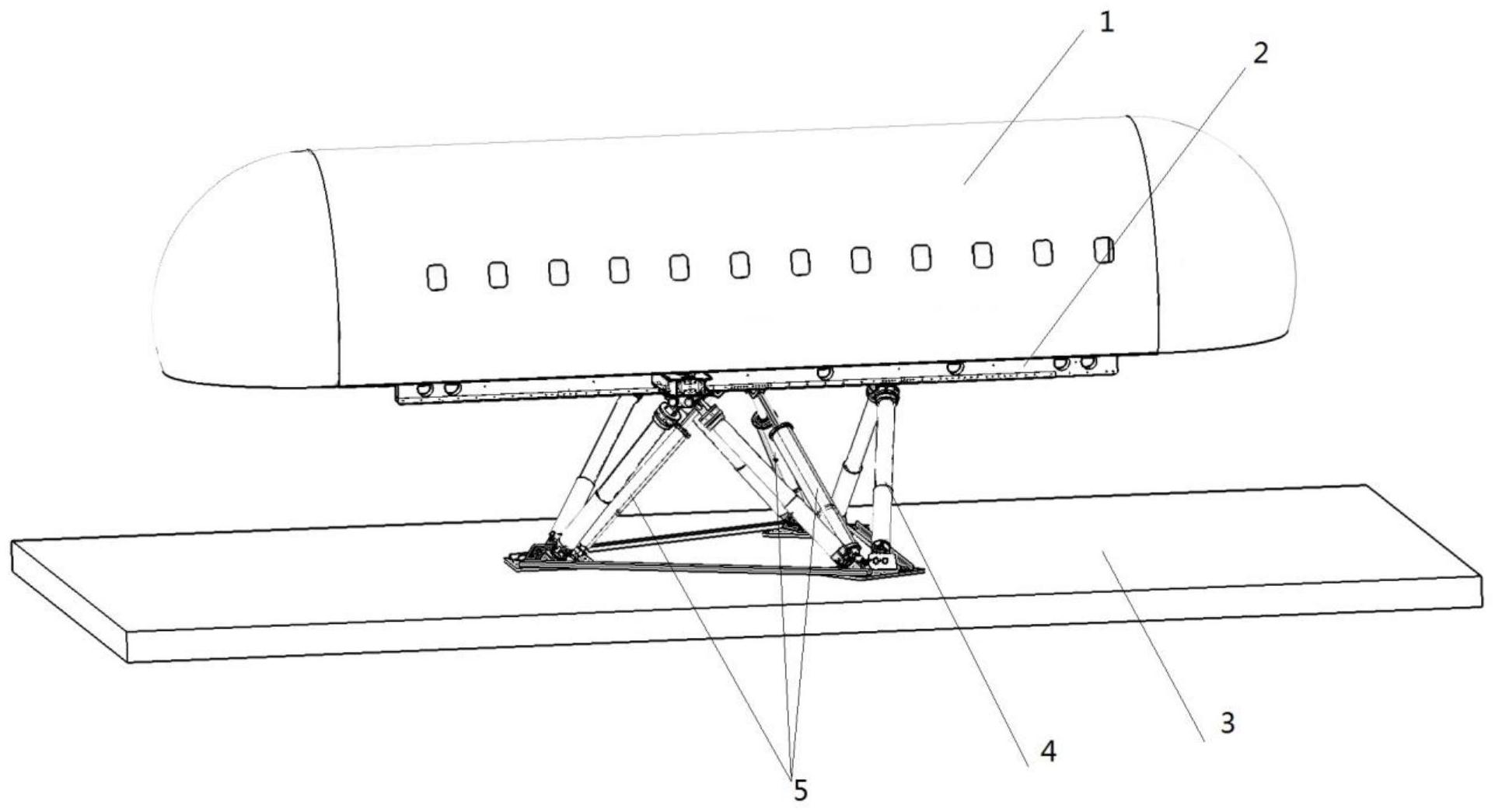
针对上述存在的技术不足,本发明的目的是提供一种六自由度模拟器气电混合控 制的方法,使气悬浮支撑单元产生的向上的支撑力,通过控制六自由度模拟器的压力来进 行调节,得到最佳的空气压力值,满足气悬浮支撑系统支撑和平衡平台自重和部分负载的 目的,从而提高了整个系统的响应速度;同时因为空气的压缩性,对平台又有一定的缓冲作 用,加强了平台的安全性。 为解决上述技术问题,本发明采用如下技术方案: 一种六自由度模拟器气电混合控制的方法,基于电、气动混合控制的六自由度模 拟训练器,其特征在于,包括: 空气压缩机接通电源后,开始向总储气罐内充气,当储气罐的气压达到控制阀的 设定值时,空气压缩机停止运动; 当训练器的电动运动平台运动时,气悬浮支撑单元自动监测储气罐的压力范围; 当储气罐压力下降低于设定范围时,空气压缩机自动开启,向总储气罐内充气; 当由于环境变化等因素使储气罐内压力升高超过安全设定值时,控制阀的安全阀 门自动放气降压,保证气悬浮支撑单元的安全。 本发明的有益效果在于:本发明的方法,使气悬浮支撑单元产生的向上的支撑力, 通过控制六自由度模拟器的压力来进行调节,得到最佳的空气压力值,满足气悬浮支撑系 统支撑和平衡平台自重和部分负载的目的,从而提高了整个系统的响应速度;同时因为空 气的压缩性,对平台又有一定的缓冲作用,加强了平台的安全性。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他的附图。 图1为本发明实施例提供的一种电、气动混合控制的六自由度模拟训练器的结构 示意图; 图2为本发明实施例提供的一种电、气动混合控制的六自由度模拟训练器的工作 3 CN 111722652 A 说 明 书 2/3 页 原理框图。 附图标记说明: 训练仓1、顶板2、基座3、电动缸4、气动缸5。











