
技术摘要:
一种适用于低轨敏捷卫星的双组元推进变轨方法,针对双组元推进变轨系统的特点,改进传统变轨控制流程,通过注入轨控块数据实现了轨控前后自主进行卫星状态设置,能够短时间内完成变轨,有效减少卫星测控圈次,通过轨控期间多贮箱平衡排放及轨控后长期状态下切换为单份 全部
背景技术:
低轨敏捷卫星配置有控制力矩陀螺用于实现高精度敏捷姿态控制,推力器作为姿 态控制备份手段。随着航天任务要求越来越多样化,对敏捷卫星的轨道机动能力也提出了 更高的要求,考虑大范围轨道机动能力、推进效率以及对推进剂携带规模的较高需求,单组 元推进系统已不适用,应用了适用于中低轨卫星的一次增压双组元推进系统。 传统的低轨卫星变轨方法自主性差,轨控前后均需要手动注入指令进行卫星的状 态设置,如取消/引入偏流角操作、星敏/红外定姿切换等,在轨完成一次轨控操作耗时较 长,一般需要3个测控圈次;在轨控过程中只能通过喷气进行姿态控制,无备份姿态控制手 段,且增加了燃料消耗;双组元推进系统虽然在高轨、深空等卫星中广泛应用,但由于低轨 遥感卫星需要全寿命周期实施轨道机动和维持任务以及敏捷卫星高精度姿态控制对卫星 质心偏心的要求,高轨卫星双组元推进系统的变轨方法无法适用于低轨敏捷卫星。针对上 述问题,亟须设计相应的变轨方法,解决低轨敏捷卫星双组元推进的变轨问题。
技术实现要素:
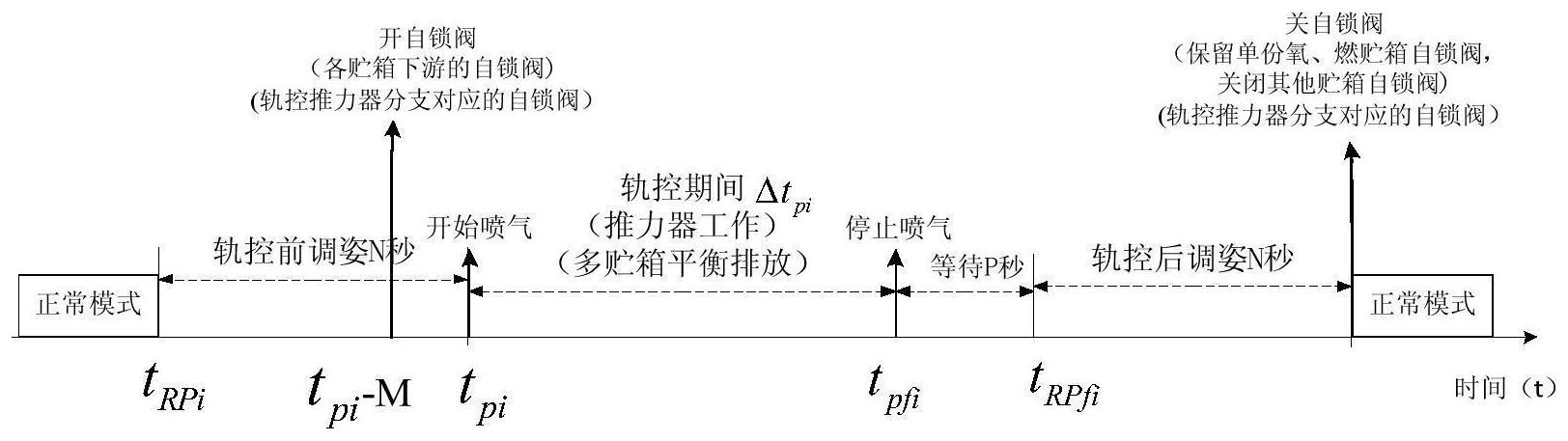
本发明解决的技术问题是:针对目前现有技术中,传统的低轨卫星变轨方法自主 性差、变轨前后均需手动注入指令、轨控操作耗时长、无备份姿态控制手段、燃料消耗多且 双组元推进系统在低轨敏捷卫星缺乏应用方法的问题,提出了一种适用于低轨敏捷卫星的 双组元推进变轨方法。 本发明解决上述技术问题是通过如下技术方案予以实现的: 一种适用于低轨敏捷卫星的双组元推进变轨方法,具体步骤为: (1)根据变轨任务所需轨控数据块格式生成变轨任务所需轨控数据块,并通过地 面控制站向卫星上注轨控数据块; (2)于待变轨卫星上进行轨控数据块解析,自主进行轨控前卫星状态设置,记录星 上时间t并获取变轨任务时间参数; 所述变轨任务时间参数包括轨控调姿开始时刻tRPi、轨控开始喷气时刻tpi、轨控时 长Δtpi、轨控结束后调姿时刻tRPfi; (3)根据星上时间t及变轨任务时间参数控制待变轨卫星由对地运行模式进入轨 控模式进行变轨,于变轨完成后重新转入对地运行模式,自主进行轨控后卫星状态设置,完 成变轨任务。 所述待变轨卫星包括卫星本体及双组元推进变轨系统,所述双组元推进变轨系统 包括推进剂贮箱、轨控推力器、姿控推力器、阀体、连接管路,其中: 推进剂贮箱:为轨控推力器、姿控推力器提供推进剂,包括氧化剂贮箱、燃烧剂贮 4 CN 111605738 A 说 明 书 2/5 页 箱,于卫星进行变轨规程中配合工作,各贮箱均配置自锁阀控制贮箱内推进剂排放; 轨控推力器:通过喷气进行卫星轨道机动控制,包括轨控推力器C组、轨控推力器D 组,所述轨控推力器C组、轨控推力器D组互为备份; 姿控推力器:通过喷气进行卫星姿态控制,包括姿控推力器A组、姿控推力器B组, 所述姿控推力器A组、姿控推力器B组互为备份; 所述推进剂贮箱通过阀体及连接管路与轨控推力器、姿控推力器连通。 所述轨控前卫星状态设置具体为:自主取消偏流角修正,自主进行定姿方式注入, 自主进行姿控方式设置。 所述轨控后卫星状态设置具体为:自主引入定姿方式、设置姿控方式,自主恢复偏 流角修正。 所述轨控推力器、姿控推力器均设置有一个自锁阀,当需要运行时自锁阀打开。 所述步骤(3)中,变轨任务具体步骤为: 记录星上时间t,当星上时间t到达轨控调姿开始时刻tRPi时,将卫星由对地运行模 式转入轨控模式,对星上时间t进行判断; 当轨控调姿开始时刻tRPi<星上时间t<轨控开始喷气时刻tpi时,对卫星进行轨控前 调姿,直至卫星变轨推力方向与变轨任务期望方向一致; 当轨控开始喷气时刻tpi>星上时间t>轨控开始喷气时刻tpi-M时,打开所有卫星氧 化剂贮箱、燃烧剂贮箱的自锁阀,将氧化剂贮箱与燃烧剂贮箱接通,并确定变轨所需轨控推 力器,打开选取的轨控推力器的自锁阀;所述M为喷气准备时间,根据双组元推进系统机械 阀门响应时间确定; 当星上时间t到达轨控开始喷气时刻tpi时,控制轨控推力器点火进行轨道机动控 制,所有推进剂贮箱共同工作以保证燃料平衡排放及卫星质心位置不变; 轨控推力器喷气达到轨控时长Δtpi后,停止喷气; 当星上时间t到达轨控结束后调姿时刻tRPfi时,对卫星进行轨控后调姿,直至卫星 姿态恢复到对地运行姿态; 当星上时间t到达tRPfi N时刻,将卫星由轨控模式转入对地运行模式,仅保留一个 推进剂贮箱自锁阀打开,关闭其余推进剂贮箱自锁阀及对应轨控推力器的自锁阀,自主进 行轨控后卫星状态设置,所述N为预留的调姿时间,根据要调姿的角度及系统设计的姿态角 速度确定。 所述姿控推力器可同时协助轨控推力器进行轨道控制。 所述姿控推力器A组中任一推力器与B组中对称位置推力器一一对应,可根据任务 需求作为轨控推力器备份。 所述轨控推力器C、D组于卫星本体坐标系下安装于卫星本体-Z面中心位置,C组轨 控推力器轴线平行于Z轴,对称于Y轴安装,D组轨控推力器轴线平行于Z轴,对称于X轴安装。 所述轨控推力器喷气达到轨控时长Δtpi后,停止喷气后需保持该状态Ps,P根据轨 控后卫星姿态的稳定时间确定。 本发明与现有技术相比的优点在于: (1)本发明提供的一种适用于低轨敏捷卫星的双组元推进变轨方法,通过改进变 轨控制流程,只需注入轨控块,轨控前后自主进行卫星状态设置,有效减少卫星测控圈次, 5 CN 111605738 A 说 明 书 3/5 页 能够短时间内完成变轨,减小变轨时间对成像任务的影响; (2)本发明于变轨期间采用控制力矩陀螺进行姿态控制,减少了燃料消耗,喷气控 制作为备份姿控手段,提高了在轨实施的可靠性; (3)本发明采用变轨期间多贮箱同时使用,以保证推进剂贮箱的平衡排放,可以确 保整星质心在卫星本体坐标系内的XOY平面不变,保证卫星高精度、敏捷机动特性,同时长 期采用单份贮箱工作确保贮箱隔离,提高了低轨全寿命周期推进的安全性。 附图说明 图1为发明提供的双组元推进系统轨控推进流程示意图;











