
技术摘要:
本发明公开了一种有手势控制功能的车辆、车辆的手势控制方法和存储介质。本发明车辆包括车身、人脸跟踪模块、手势识别模块、驱动模块和控制模块,人脸跟踪模块用于跟踪人脸,手势识别模块用于进行手势识别,驱动模块用于驱动车身进行运动,控制模块用于根据手势识别结 全部
背景技术:
遥控车辆能够广泛应用于仓储运输以及机器人作业等领域。现有遥控车辆普遍是 基于惯性传感技术,需要操作人员佩戴安装有惯性传感器的可穿戴智能设备,操作人员做 出各种手势,可穿戴智能设备测量人手运动的加速度和角度等信息,转化为对车辆的控制 指令来控制车辆。由于需要佩戴可穿戴智能设备,现有技术有较高的使用成本,同时因硬件 复杂度较高而存在较高的故障率。
技术实现要素:
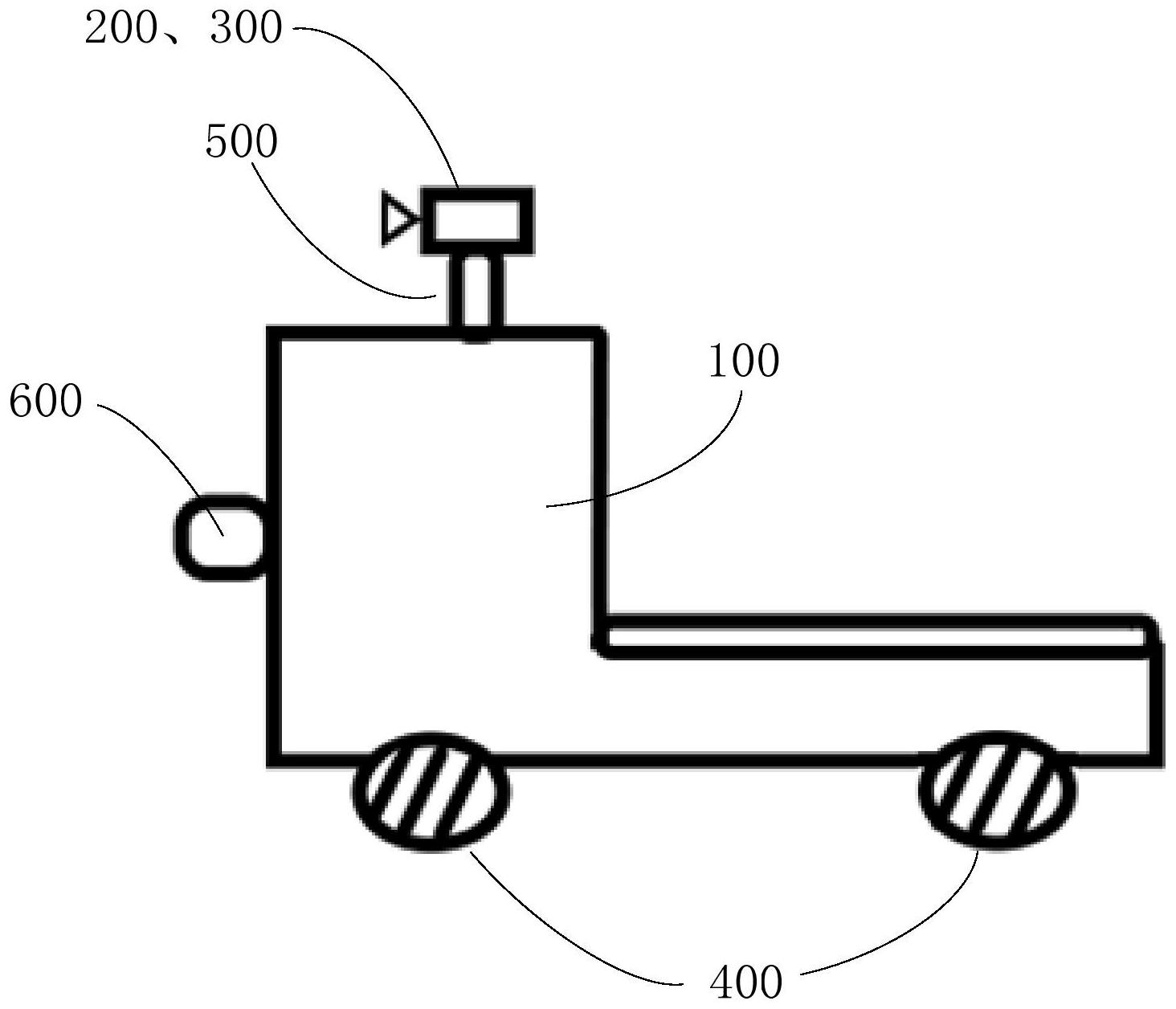
针对上述至少一个技术问题,本发明的目的在于提供一种有手势控制功能的车 辆、车辆的手势控制方法和存储介质。 一方面,本发明实施例包括一种有手势控制功能的车辆,包括: 车身; 人脸跟踪模块,安装在所述车身上,用于识别出视野中的人脸,跟踪人脸使得人脸 保持在视野内; 手势识别模块,安装在所述车身上,具有广角视野,用于跟随所述人脸跟踪模块的 跟踪及进行手势识别; 驱动模块,用于驱动所述车身进行运动; 控制模块,用于获取手势识别结果,根据所述手势识别结果控制所述驱动模块。 进一步地,所述人脸跟踪模块包括红外摄像头,所述手势识别模块包括双目鱼眼 镜头,所述红外摄像头和所述双目鱼眼镜头安装在同一云台稳定器上,所述云台稳定器安 装在所述车身上。 进一步地,所述识别出视野中的人脸,跟踪人脸使得人脸保持在视野内,包括: 所述红外摄像头对视野进行拍摄以获得第一图像; 将所述第一图像发送到所述控制模块; 所述控制模块执行OpenCV TLD跟踪算法,识别人脸在所述第一图像的当前帧中的 位置,预测人脸在所述第一图像的下一帧中的位置; 所述控制模块根据人脸在所述第一图像的当前帧中的位置以及在下一帧中的位 置,确定所述云台稳定器的动作方向; 所述控制模块根据所确定的所述动作方向,控制所述云台稳定器转动或不转动。 进一步地,所述跟随所述人脸跟踪模块的跟踪及进行手势识别,包括: 所述云台稳定器带动所述手势识别模块与所述人脸跟踪模块同步地转动或不转 动; 4 CN 111736596 A 说 明 书 2/7 页 所述双目鱼眼镜头对视野进行拍摄以获得第二图像; 将所述第二图像发送到所述控制模块; 所述控制模块使用双目立体匹配算法,将所述第二图像的二维坐标转换成为抛物 面上的三维坐标; 所述控制模块根据所述三维坐标确定深度信息; 所述控制模块使用经过训练的人工智能模型确定所述第二图像中的手掌图像; 所述控制模块根据所述手掌图像的深度信息确定三维手势图像; 所述控制模块根据所述三维手势图像确定手势识别结果。 进一步地,所述根据所述三维坐标确定深度信息,包括: 使用公式 dx=dz cotβ和 计算所述深 度信息;其中,(x1,y1,z1)为所述三维坐标,(dx,dy,dz)为所述深度信息,α和β为中间结果。 进一步地,所述驱动模块包括: 第一麦克纳姆轮,设置于所述车身的第一位置; 第二麦克纳姆轮,设置于所述车身的第二位置; 第三麦克纳姆轮,设置于所述车身的第三位置; 第四麦克纳姆轮,设置于所述车身的第四位置; 第一驱动电机,用于驱动所述第一麦克纳姆轮; 第二驱动电机,用于驱动所述第二麦克纳姆轮; 第三驱动电机,用于驱动所述第三麦克纳姆轮; 第四驱动电机,用于驱动所述第四麦克纳姆轮。 进一步地,所述车辆还包括: 测距模块,安装在所述车身上,与所述控制模块连接,用于获取所述车身与障碍物 之间的距离并发送到所述控制模块;所述控制模块将所述车身与障碍物之间的距离与预设 的安全距离进行比较。 进一步地,所述车辆还包括: 警报模块,安装在所述车身上,与所述控制模块连接,用于获取警报信号进行警 报;所述警报信号由所述控制模块确定所述车身与障碍物之间的距离小于预设的安全距离 的情况下发出。 另一方面,本发明实施例还包括一种车辆的手势控制方法,包括: 识别出视野中的人脸,跟踪人脸使得人脸保持在视野内; 跟随对人脸的跟踪,进行手势识别; 获取手势识别结果,根据所述手势识别结果控制车身进行运动。 另一方面,本发明实施例还包括一种存储介质,其中存储有处理器可执行的指令, 所述处理器可执行的指令在由处理器执行时用于执行实施例中的车辆的手势控制方法。 本发明的有益效果是:通过手势识别模块来识别使用人员做出的手势,根据手势 识别结果来控制和驱动车辆,避免了现有技术中依赖佩戴可穿戴智能设备来进行控制,使 得使用人员能够以裸手做出手势来控制车辆,具有较好的便捷性,也避免了使用复杂的硬 件导致的高故障率。另一方面,使用人脸跟踪模块来跟踪使用人员的人脸,人脸跟踪模块可 5 CN 111736596 A 说 明 书 3/7 页 以连带手势识别模块对使用人员进行跟踪,手势识别模块的更广的视野能够更容易地捕捉 到使用人员的手势,即使因为使用人员与车辆之间的相对位置发生变动,也能够保持较高 的手势识别正确率,从而适合复杂的使用环境。 附图说明 图1为本发明实施例中车辆的结构第一示意图; 图2为本发明实施例中车辆的结构第二示意图。











