
技术摘要:
本申请涉及机械设备技术领域,尤其涉及一种机械限位机构,其包括旋转座、弹簧臂、载物部和加强臂,并且弹簧臂、旋转座、加强臂和载物部组成四连杆机构,通过弹簧臂的转动使载物部上下运动,通过弹簧臂和加强臂的接触进行限位。当弹簧臂和加强臂带动载物部向下运动时, 全部
背景技术:
平衡臂系统,是一种依靠弹簧(机械弹簧或气弹簧)平衡末端重物负载,在一定的 空间范围内,使得负载不借助其他外力实现自由悬浮的装置。目前,此装置在医院中,在无 影灯、监护显示器等设备系统中大量应用。作为一种悬挂系统,在医院设备应用环境中,平 衡臂系统中功能弹簧部件,在允许的设计负载重量内,有较高的可靠性。但出于医疗器械设 备的检测标准要求,必须得有机械限位方式,以应对弹簧失效(机械弹簧疲劳、弹簧断离、气 弹簧失效等)导致得负载坠落风险。
技术实现要素:
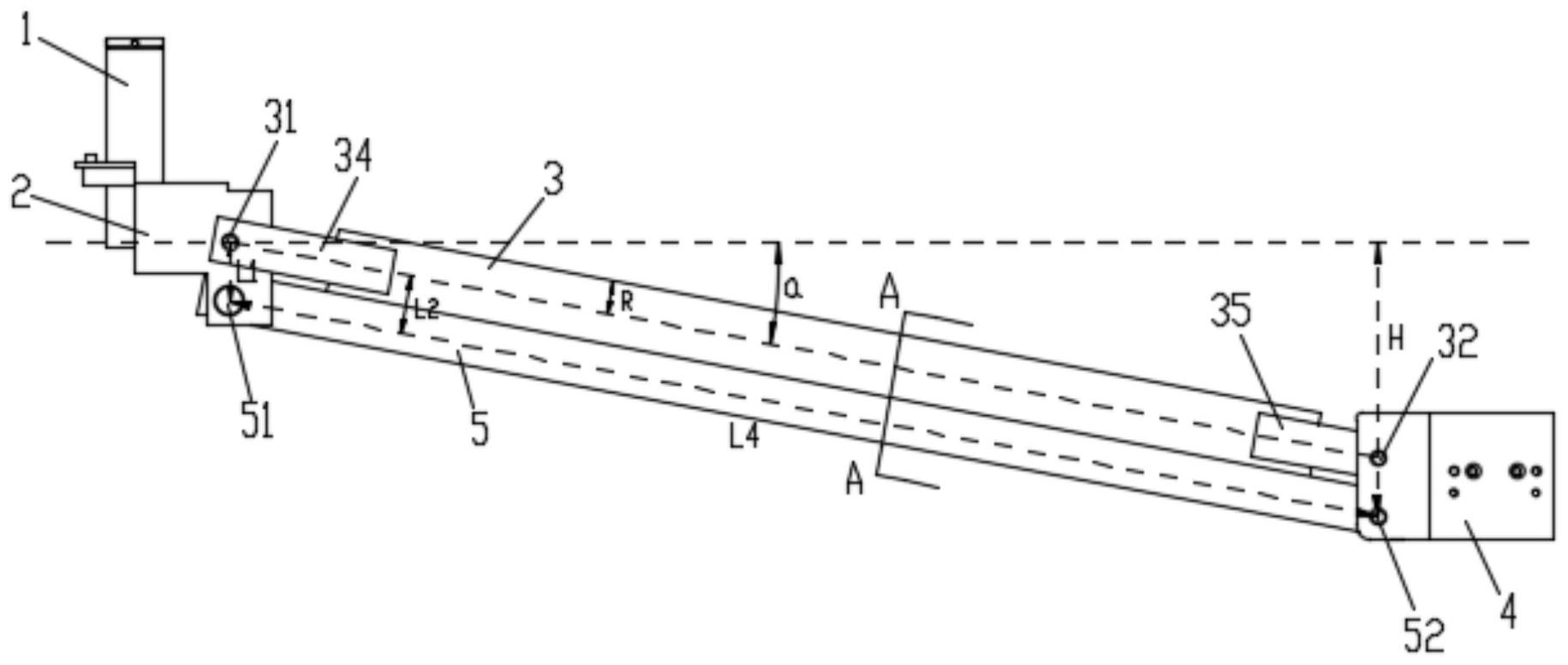
本申请提供了一种机械限位机构,能够防止负载坠落。 本申请的提供了一种机械限位机构,其包括: 旋转座; 弹簧臂,所述弹簧臂的第一端与所述旋转座连接; 载物部,所述载物部用于载物,且所述弹簧臂的第二端与所述载物部连接; 加强臂,所述加强臂的第一端与所述旋转座连接,所述加强臂的第二端与所述载 物部连接,使所述弹簧臂、所述旋转座、所述加强臂和所述载物部组成四连杆机构; 通过所述弹簧臂和所述加强臂的接触实现所述弹簧臂和所述加强臂的限位,且限 位的高度的变化通过调整所述弹簧臂的尺寸和/或所述加强臂的尺寸实现。 进一步地,所述弹簧臂的第一端通过第一转轴与所述旋转座连接,所述弹簧臂的 第二端通过第二转轴与所述载物部连接; 所述加强臂的第一端通过第三转轴与所述旋转座连接,所述加强臂的第二端通过 第四转轴与所述载物部连接。 进一步地,所述加强臂用于与所述弹簧臂接触的部位和所述第四转轴轴心之间的 距离L3与所述弹簧臂的半径R之间的关系为: 其中,L1为所述第一转轴和所述第三转轴的轴心距,L4为所述第三转轴和所述第 四转轴的轴心距,h为所述加强臂用于与所述弹簧臂接触的部位与所述弹簧臂外壁之间形 成的间隙,H为载物部下降的距离。 进一步地,所述弹簧臂设置为圆柱形结构,所述加强臂设置为槽状结构,所述槽状 结构的开口朝向所述弹簧臂;所述槽状结构内部设置有支撑件,所述支撑件沿所述槽状结 构的高度方向延伸,且所述支撑件的顶部用于与所述弹簧臂抵接。 进一步地,沿着所述加强臂的臂长方向,所述加强臂的槽状结构包括设置于所述 4 CN 111609031 A 说 明 书 2/7 页 槽状结构两端的端板,并且所述端板均连接所述槽状结构的侧壁; 所述端板朝向所述弹簧臂的一侧形成为曲面,并且所述曲面与所述弹簧臂的截面 形状吻合。 进一步地,所述弹簧臂设置为圆柱形结构,所述加强臂靠近所述弹簧臂的面为弧 面,所述弧面与所述圆柱形面至少部分相适配,所述弧面用于与所述弹簧臂抵接,所述加强 臂设置为中空结构或实心结构。 进一步地,所述弹簧臂设置为圆柱形结构,所述加强臂靠近所述弹簧臂的面为平 面,所述平面用于与所述弹簧臂抵接。 进一步地,所述弹簧臂通过其第一限位部与所述加强臂接触,所述加强臂通过其 第二限位部用于与所述弹簧臂接触,所述第一限位部与所述第二限位部抵接,将所述弹簧 臂限位。 进一步地,所述弹簧臂包括杆体,所述杆体中设置有弹簧,所述弹簧一端与所述杆 体连接,另一端与所述旋转座连接,并使所述弹簧一直处于拉伸状态。 进一步地,所述第一连杆一端与所述弹簧臂固定连接,另一端与所述旋转座铰接; 所述第二连杆一端与所述弹簧臂固定连接,另一端与所述载物部铰接。 本申请提供的技术方案可以达到以下有益效果: 本申请所提供的机械限位机构包括旋转座、弹簧臂、载物部和加强臂,其中,弹簧 臂、旋转座、加强臂和载物部组成四连杆机构,通过弹簧臂的转动使载物部上下运动,在弹 簧臂的弹性件失效的情况下,通过弹簧臂和加强臂的接触进行限位。当弹簧臂和加强臂带 动载物部向下运动时,弹簧臂与加强臂抵接后,四连杆机构将无法进一步转动,从而实现机 械限位,能够防止载物部坠落;且无需增加额外的零部件,仅通过调整弹簧臂的尺寸和/或 加强臂的尺寸实现不同的限位高度,使用方便,且结构简单。 应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本 申请。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域 普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。 图1为本申请实施例提供的机械限位机构的结构示意图; 图2为本申请实施例提供的机械限位机构的主视图; 图3为本申请一实施例基于图2中A-A的剖视图; 图4为本申请另一实施例基于图2中A-A的剖视图; 图5为本申请又一实施例基于图2中A-A的剖视图; 图6为本申请再一实施例基于图2中A-A的剖视图; 图7为本申请实施例提供的机械限位机构的局部剖视图。 附图标记: 1-水平臂; 2-旋转座; 5 CN 111609031 A 说 明 书 3/7 页 3-弹簧臂; 31-第一转轴; 32-第二转轴; 33-第一限位部; 34-第一连杆; 35-第二连杆; 36-杆体; 37-弹簧; 4-载物部; 5-加强臂; 51-第三转轴; 52-第四转轴; 53-第二限位部; 54-支撑件。











