
技术摘要:
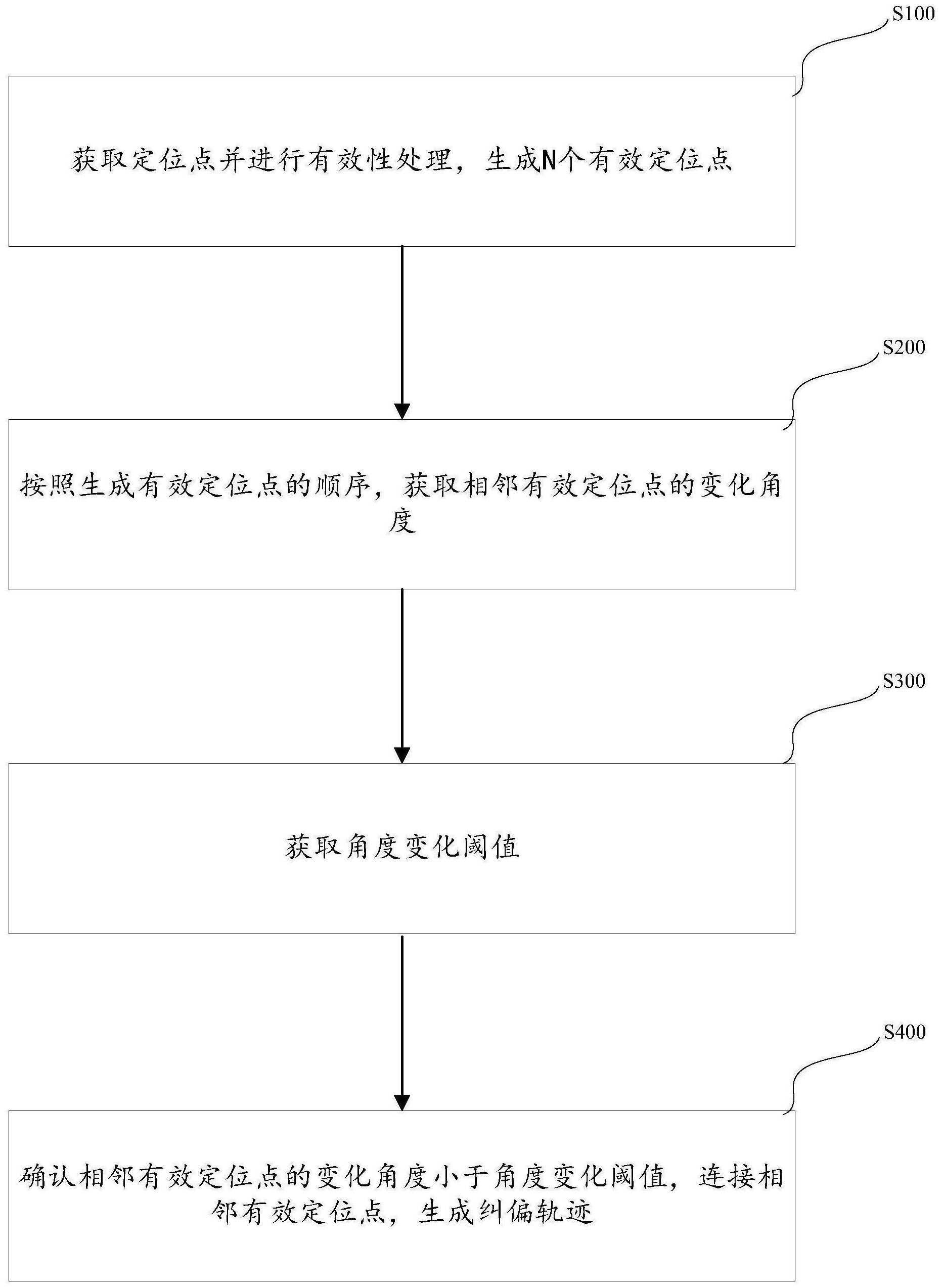
本发明提供了一种轨迹纠偏方法,包括如下步骤:获取定位点并进行有效性处理,生成N个有效定位点;按照生成有效定位点的顺序,获取相邻有效定位点的变化角度;获取角度变化阈值;确认相邻有效定位点的变化角度小于角度变化阈值,连接相邻有效定位点,生成纠偏轨迹。去除 全部
背景技术:
运动的轨迹是由大量的定位点所组成的。而定位精度主要受到卫星信号遮挡,信 号折射,大气层或电离层干扰等环境因素影响。在高大建筑密集或天气情况不好的地方, GPS信号经过多次的折、反射,造成信号误差,会出现漂移的现象。GPS漂移会导致很多问题, 当GPS终端静止的时候,其经纬度经常在变,偶尔变化还比较大;可能会出现用户在家休息 一天,却在外行走了几十公里的情况。而且,如果该用户恰巧在运动后突发诸如心脏病突发 的紧急状态,恰巧该用户处于香港这类卫星定位效果极差的地区,无法依靠轨迹找到该用 户,会对该用户带来巨大的伤害。
技术实现要素:
为解决上述至少一技术问题,本发明的主要目的是,提供一种轨迹纠偏方法及装 置。 为了解决上述技术问题,本发明采用的技术方案为:一种轨迹纠偏方法,所述方法 用于可穿戴式设备,包括如下步骤: 获取定位点并进行有效性处理,生成N个有效定位点; 按照生成有效定位点的顺序,获取相邻有效定位点的变化角度; 获取角度变化阈值; 确认所述相邻有效定位点的变化角度小于所述角度变化阈值,连接所述相邻有效 定位点,生成纠偏轨迹; 其中,N为正整数,且大于等于2。 进一步的,所述连接所述相邻的所述有效定位点的步骤之前,还包括: 按照所述生成有效定位点的顺序,获取多个相邻所述有效定位点所围成的面积及 面积阈值范围; 确认所述多个相邻所述有效定位点所围成的面积处于所述面积阈值范围。 具体的,所述连接所述相邻的所述有效定位点的步骤,具体包括: 对第1个有效定位点及第N个有效定位点进行直线连接,生成第1辅助直线; 预设直线距离阈值; 获取第i个有效定位点与所述第1辅助直线的直线距离; 确认所述第i个有效定位点与所述第1辅助直线的直线距离小于所述直线距离阈 值,将所述第i个有效定位点分别连接所述第1个有效定位点及所述第N个有效定位点,以及 删除所述第1辅助直线; 其中,i为正整数,且i小于N。 进一步地,当所述第i个有效定位点与所述辅助直线的直线距离大于所述直线距 4 CN 111597457 A 说 明 书 2/8 页 离阈值时,还包括如下步骤: 对第k个有效定位点及第M个有效定位点进行直线连接,生成第j辅助直线; 获取第j个有效定位点与所述第k个辅助直线的直线距离; 确认所述第j个有效定位点与所述第k个辅助直线的直线距离小于所述直线距离 阈值,将所述第j个有效定位点分别连接所述第k个有效定位点及所述第M个有效定位点,以 及 删除所述第j辅助直线; 其中,M、k、j为正整数,k小于M,j不等于k且小于M。 具体的,所述获取定位点并进行有效性处理的步骤中,包括: 预设合理距离范围; 按照定位点获取的顺序,获取相邻定位点间的距离; 确认所述相邻定位点间的距离不属于所述合理距离范围,确认该定位点为第一消 除定位点; 去除所述第一消除定位点。 具体的,所述获取定位点并进行有效性处理的步骤中,包括: 按照定位点获取顺序,对多个定位点进行直线连接,生成有效甄别直线; 获取偏移阈值; 若第二消除定位点与所述效甄别直线的距离小于所述偏移阈值,去除所述所述第 二消除定位点,以及 删除所述有效甄别直线。 进一步地,所述生成纠偏轨迹的步骤包括: 根据所述有效定位点,获取道路轨迹; 按照所述道路轨迹对连接的相邻有效定位点的轨迹进行平滑处理。 具体的,所述按照生成有效定位点的顺序,获取相邻的有效定位点变化角度的步 骤中,具体包括: 获取第M个生成的有效定位点与第M-1个生成的有效定位点间的角度信息; 获取第M个生成的有效定位点与第M 1个生成的有效定位点间的角度信息。 本发明第二方面提供了一种轨迹纠偏系统,所述系统用于可穿戴式设备,其特征 在于,包括: 定位获取模块,用于获取定位点并进行有效性处理,生成N个有效定位点; 角度获取模块,用于按照生成有效定位点的顺序,获取相邻有效定位点的变化角 度;以及, 用于获取角度变化阈值; 生成模块,用于确认所述相邻有效定位点的变化角度小于所述角度变化阈值,连 接所述相邻有效定位点,生成纠偏轨迹; 其中,N为正整数,且大于等于2。 本发明第三方面提供了一种智能手表,其特征在于,包括处理系统,所述处理系统 应用了上述的方法。 本发明的有益效果在于:获取定位点并进行有效性处理,从而去除明显偏移的定 5 CN 111597457 A 说 明 书 3/8 页 位点及过于密集的定位点,以此挑选出有效定位点,可以节约计算资源,降低计算成本,有 助于准确、快速的确定运动的位置。按照生成有效定位点的顺序,获取相邻有效定位点的变 化角度;其运行的速度更快,定位更准。相邻有效定位点的变化角度与角度变化阈值的差 值,获得较为便捷。应用连接所述相邻有效定位点的方式,生成纠偏轨迹,其所需的计算资 源较小,计算效果更佳。 附图说明 下面结合附图详述本发明的具体结构: 图1为本发明的轨迹纠偏方法的第一实施例的基本流程图; 图2为本发明的轨迹纠偏方法的第二实施例中获取定位点并进行有效性处理的基 本流程图; 图3为本发明的的轨迹纠偏方法的第三实施例中获取定位点并进行有效性处理的 另一基本流程图; 图4为本发明的的轨迹纠偏方法的第四实施例中连接相邻的有效定位点的基本流 程图; 图5为本发明的的轨迹纠偏方法的第五实施例中连接相邻的有效定位点的另一流 程图; 图6为本发明的轨迹纠偏装置的第一实施例的基本流程图。











