
技术摘要:
可以使用一系统和方法来评估软组织。膝关节置换软组织评估可以使用可调节间隔器,例如尺寸可变的物理间隔器或可充气囊状体,与在运动范围测试期间测量力、压力、间隙距离等的传感器一起。一方法可以包括在运动测试范围内使可调节间隔器的内侧部件和外侧部件保持相等的 全部
背景技术:
为了帮助外科医生改变骨头以及将植入物定位和定向到所需位置,已经开发了计 算机辅助手术。计算机辅助手术可能包含多种设备,包括手术导航,术前计划和各种机器人 设备。计算机辅助手术具有潜力的一个领域是整形外科关节修复或置换手术。例如,软组织 平衡是关节修复的重要因素,因为不平衡可能导致关节不稳定。但是,在关节上进行整形外 科手术时,通常是用手进行软组织评估,而外科医生则定性地评估患者的运动范围的极限。 传统的技术可能导致错误或缺乏准确性。 附图说明 在不必须按比例绘制的附图中,在不同的视图中相似的数字可以描述相似的部 件。具有不同字母后缀的相似数字可以表示相似部件的不同实例。附图通过示例、而非限制 的方式大体上示出了本文档中讨论的各实施例。 图1示出了根据一些实施例的与机械臂一起使用的力传感器装置。 图2-3示出了根据一些实施例的手术计划用户界面。 图4示出了根据一些实施例的具有各种间隔器的eLibra设备。 图5-6示出了根据一些实施例的校准用户界面。 图7示出了根据一些实施例的用于使用eLibra设备的系统。 图8示出了根据一些实施例的力测量显示用户界面。 图9示出了根据一些实施例的可调节间隔器。 图10示出了根据一些实施例的手术技术。 图11示出了根据一些实施例的具有可独立调节的内侧和外侧部件的可调节间隔 器。 图12示出了根据一些实施例的可调节间隔器和显示出可调节间隔器的效果的图 形。 图13示出了根据一些实施例的用于将可调节间隔器与机器人手术设备一起使用 的系统。 图14示出了根据一些实施例的在局部膝关节置换术中使用的单髁可调节间隔器。 图15示出了根据一些实施例的流程图,该流程图示出了在外科膝关节手术中使用 可调节间隔器的技术。 图16示出了根据一些实施例的用于执行本文描述的技术的系统。 4 CN 111615359 A 说 明 书 2/12 页 图17示出了根据一些实施例的、可以在其上执行本文所讨论的技术中的任何一个 或多个的机器的示例的框图。
技术实现要素:
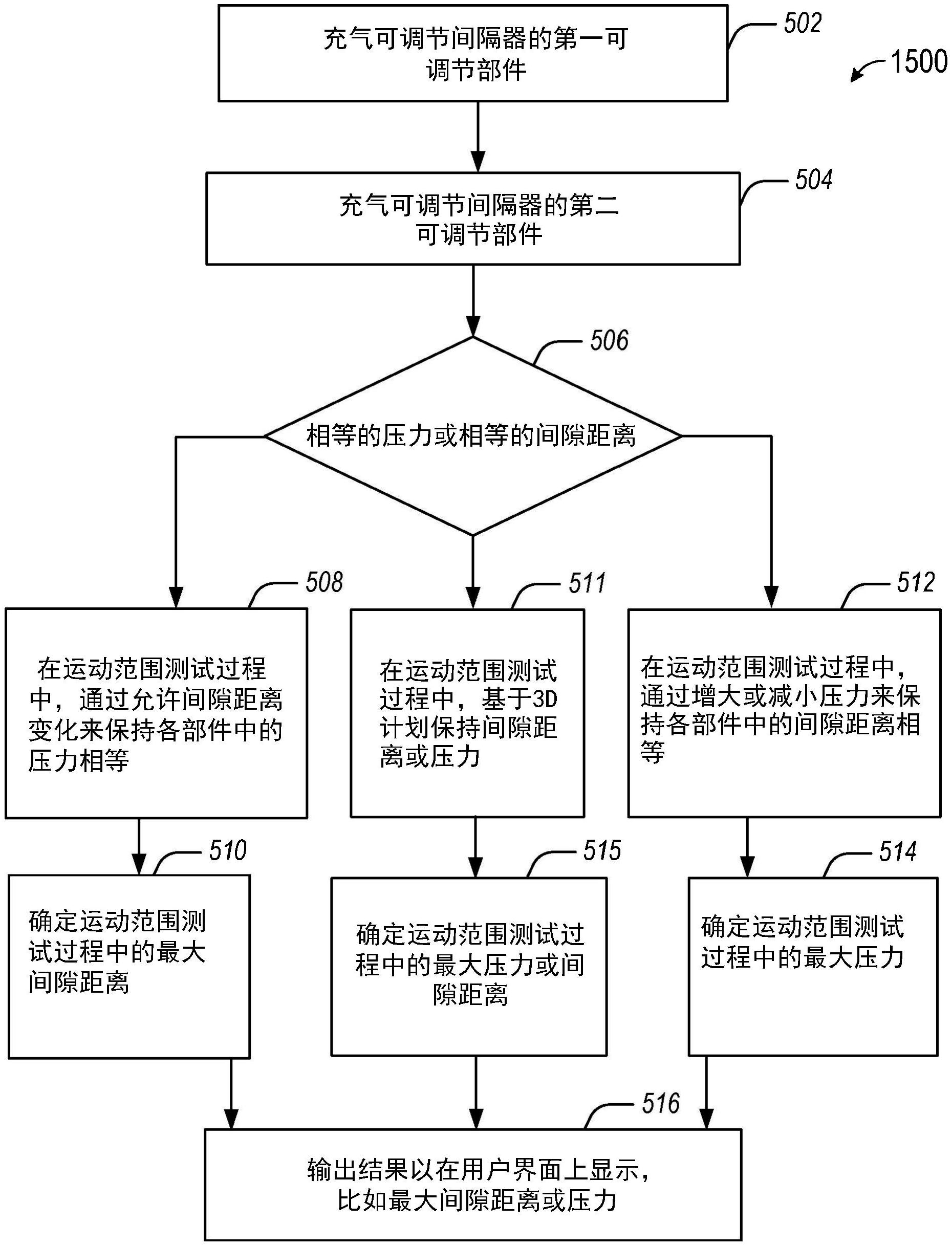
本文提供了用于机器人膝关节置换术中的软组织平衡的系统和方法。膝关节置换 术可受益于使用机器人设备来协助手术。膝关节置换术的一方面包括在整个膝盖运动范围 内检查膝盖的对准和运动学。当膝盖移动时,可以测量间隙距离或韧带上的张力以确定运 动学和对准。在一示例中,可以在运动范围测试过程中将间隔器插入膝盖,以在检查运动学 或对准时保持特定的张力或间隙距离。间隔器可以是电子设备,如下所述的,以传输力或张 力信息。在另一示例中,间隔器可以是可调节的,使得可调节的间隔器可以在运动范围测试 过程中保持固定的压力或间隙距离。在一示例中,间隔器可以在膝盖的内侧相对于外侧保 持不同的力或间隙距离。 图1示出了根据一些实施例的与机械臂一起使用的力传感器装置。本文所述的系 统和技术包括使由内华达州里诺市的Synvasive Technology提供的eLibra动态膝关节平 衡系统适应无线通信,以与Medtech SA ROSA机器人手术系统一起使用,用于全膝关节置换 术和部分膝关节置换术。 如图1所示,eLibra设备102将由eLibra设备捕获的力和张力数据无线传输到机器 人设备104。eLibra设备102可以通过板载加速度计和陀螺仪跟踪eLibra设备102的相对定 向,与机器人设备104(例如Medtech ROSA机器人)的光学跟踪系统相结合,允许在整个运动 范围内的膝盖内侧隔室和外侧隔室中的力的图表如在图1中显示出来。 使用eLibra和ROSA膝盖应用的这种组合在全膝关节置换术中平衡膝关节的方法 可以如下所述地进行。 在膝关节置换术中在执行任何股骨切除之前,可以使用试验设备检查膝盖的张 力。如图2所示,描述了机器人设备应用程序的膝盖计划屏幕,示出了股骨部件的预期v/v (内翻/外翻),胫骨切割的v/v,内侧隔室上的远侧切除的厚度,外侧隔室的远侧切除,内侧 隔室和外侧隔室两者的近侧切除,或者内侧隔室和外侧隔室的后部切除,在一示例中。 计划屏幕可以显示后部斜率和屈曲角度值,该角度值表示在计划如图2中所示的 切除时使用的屈曲值。 图3显示了如何将来自eLibra设备的信息合并到机器人膝盖应用程序的计划屏幕 中的示例。在图3的左手侧,显示出eLibra间隔器的所记录力值在内侧隔室中为62牛顿,在 外侧隔室中为77牛顿。这些力值是预计在外科医生按照本文图5和图6中制定的计划进行切 除的示例中发生的。 如图3所示,在此示例中,膝盖处于27度屈曲和2度内翻,在伸展过程中使用带4号 eLibra设备的间隔器产生62牛顿的力,而在此示例中在伸展过程中使用带-1号间隔器产生 77牛顿的力。 如图4所示,此eLibra间隔器值可以通过使用方差尺寸(variance size)从-4mm 至-3、-2、-1、0mm等,直到正1、正2、正3、正4毫米的垫片来实现。 可替代地,如图9所示,不使用垫片,可以使用类似于授予Synvasive Technology 的美国专利9,808,356中描述的那些的可调节间隔工具、通过一个或多个螺钉的旋转来调 5 CN 111615359 A 说 明 书 3/12 页 节内侧和外侧隔室的平台高度。平台调节也可以通过电测设备、潜在地在机器人设备的控 制下进行。例如,当膝盖运动经过整个运动范围时,通过利用光学跟踪检测腿部定向的变 化,机器人系统可以无线地调节可调节间隔器的内侧和外侧隔室的高度。 图5显示了如何使用eLibra间隔器以及所记录的屈曲和定位值来计划全膝关节置 换的切除。 在此示例中,在内侧隔室上计划了总共15毫米的骨切除(远侧8.0 近侧7.0)。如果 所计划的植入物尺寸为19毫米,那么该计划将导致内侧隔室过度填充(overstuff)4毫米。 因此,为了利用此计划切除测试和测量内侧隔室中的张力,eLibra设备应该在内侧隔室中 装载尺寸为4毫米的间隔器。 在外侧隔室中,为了使用这些计划测试切除所承受的张力,分别为10毫米的近侧 切除和远侧切除的组合导致所计划的骨切除总共为20毫米。如果所计划的植入物尺寸为19 毫米,那么这将导致外侧隔室中的松弛和1毫米的填充不足,因此将使用-1毫米的eLibra间 隔器来测量在伸展过程中该计划切除(图5)承受的力。 在如图6所示的屈曲中,此处的计划要求进行9毫米的后部切除和7毫米的近侧切 除,因此计划在内侧隔室中进行16毫米的总骨切除。植入物尺寸仍为19毫米将导致内侧隔 室中3毫米的过度填充,那么在这些计划的切除中用于测量屈曲时承受的力所需的eLibra 间隔器将为3毫米。 在外侧上类似,计划的骨切除为17毫米,近侧切除10毫米,后部切除7毫米,植入物 尺寸为19毫米将导致外侧隔室中2毫米的过度填充,因此将需要2毫米的eLibra间隔器尺寸 来准确地测量在这些计划的切除中所承受的张力。 外科医生可以调整计划切除,测试并记录在屈伸和伸展过程中eLibra设备所捕获 的力,然后根据需要重复进行,直到该计划产生所需的预期张力值。然后,外科医生可以根 据最终计划进行股骨切除。 切割完成后,根据计划值完成切除,并且可以使用试验植入物在整个运动范围内 确认张力,例如在与eLibra设备相关的专利申请中所述的(例如美国申请序列No .13/ 709506,在此其被整体通过引用方式并入本文)。 如图7所示,可以将eLibra设备插入股骨和胫骨之间,并且可以使患者的腿部在从 屈曲到伸展的整个运动范围内移动,并且eLibra设备将记录(或ROSA机器人的CAS系统将记 录)在整个运动范围内的力值。在图8中,在内侧隔室中经受的力(以牛顿为单位)是实线,而 外侧隔室是虚线。屈曲的角度值通过eLibra设备的角度跟踪(可以使用附加传感器,比如惯 性测量单元(IMU)、加速计、陀螺仪等进行)或者机器人设备的跟踪(可以,通过对股骨和胫 骨的光学跟踪或利用与膝盖的一部分接触以利用机器人设备的内部加速度计或陀螺仪跟 踪膝盖,来跟踪患者腿部的屈曲/伸展度)来捕获。 本文描述了将可调节间隔器用于外科膝关节手术、例如在膝关节置换术中评估软 组织的系统和方法。本文所述的系统可包括使用具有可独立调节部件(例如,内侧部件和外 侧部件)的可调节间隔器来进行软组织评估。在一示例中,在软组织评估过程中可独立调节 的部件可以使用独立的压力或独立的间隙距离来控制。本文所述的可调节间隔器系统和方 法可以与机器人手术设备一起使用。 机器人为在外科手术领域协助外科医生提供了有用的工具。机器人设备可以协助 6 CN 111615359 A 说 明 书 4/12 页 外科手术领域执行诸如下述的任务:活组织检查,用于功能性手术(例如,刺激大脑皮层、深 层脑刺激)的电极植入,开放性颅骨外科手术,内窥镜介入,其他“钥匙孔(key-hole)”手术, 关节置换手术,例如全或部分膝关节置换,髋关节置换,肩部植入手术等等。在一示例中,手 术过程可以使用手术机器人。手术机器人可以包括用于执行操作的机械臂。跟踪系统可以 用于确定手术机器人或机械臂在坐标系或手术区域内的相对位置。手术机器人可以具有不 同的坐标系统或跟踪系统(例如,使用手术机器人的已知运动)。机械臂可以包括手术机器 人的机械臂的末端执行器,其可以使用诸如陀螺仪、磁力镜、加速度计等的传感器。在一示 例中,处理器可以用于处理信息,例如跟踪信息,操作参数,施加的力,位置等。 图10示出了根据一些实施例的外科技术1000。技术1000使用机器人手术设备来辅 助外科手术程序,诸如切除,运动范围测试或软组织平衡测试。技术1000包括发起3D计划, 比如使用机器人手术设备(例如,Medtech SA ROSA机器人手术系统)的用户界面。技术1000 包括执行胫骨切割的操作,例如使用ROSA或其他机械臂进行全或部分膝关节置换术。技术 1000包括在运动范围测试过程中捕获平衡的操作,例如使用可充气设备或机械臂。可充气 设备在下面进行更详细描述。 技术1000可包括使用来自运动范围测试的反馈来调整计划(例如,基于运动范围 测试自动更改术前计划的参数,例如平衡信息,最大或最小距离,运动范围,或角度)。技术 1000可以包括执行远侧切割,诸如使用机械臂。技术1000可以包括评估软组织中的平衡,比 如屈曲或伸展平衡,使用可充气设备或机械臂(例如,具有被附接到机械臂远端上的末端执 行器的工具的Rosa机械臂)。 在一示例中,技术1000可以包括使用光学跟踪器来跟踪手术的部件。例如,被跟踪 部件可以包括股骨,胫骨,机械臂(例如,被附接到机械臂远端的末端执行器),工具等。技术 1000可以包括执行运动范围测试以评估在伸展和屈曲之间的范围内的膝关节中的软组织 张力,压力或间隙距离。光学跟踪器可用于确定运动范围测试过程中骨头或软组织的各种 属性。例如,在整个运动范围测试过程中胫骨(或股骨)行进的距离,在运动范围测试过程中 的骨头角度(例如,最大屈曲角度或最大伸展角度),各个点处或整个运动范围测试过程中 的间隙距离(可能包括单独的内侧和外侧间隙距离或整个范围内的组合或最大间隙距离) 等。 在一示例中,所述间隙距离可以在运动范围测试过程中在用户界面上显示。可以 基于所计划的切除(或多次切除,例如胫骨切割或股骨切割)来显示间隙距离。可以在用户 界面上显示所计划的切除,与整个运动范围测试过程中的间隙距离一起,以显示基于所计 划的切除和所评估的间隙距离可能出现的差异或问题。在一示例中,当将所述间隙距离与 未切除的骨(例如,骨的表面)一起使用时,会出现潜在的误差,因为用于切除后的膝盖的最 终间隙距离不包括表面误差。例如,骨刺可能会引发间隙测量问题,内翻畸形可能会影响松 弛度,错误状态可能会影响间隙测量,或者来自间隔器工具的外侧和内侧松弛(laxity)可 能会引起测量问题(例如,由于韧带在侧面,因为旋转的原因,测得的松弛度可能与实际松 弛度不同。 技术1000可以包括建立术前计划并在用户界面上显示具有所计划的切除的膝盖。 然后,在整个运动范围测试过程中确定间隙距离时,间隙距离与所计划的切除被显示在用 户界面上。预先计划的切除的可视化与实际测得的间隙距离信息的这种结合允许利用实际 7 CN 111615359 A 说 明 书 5/12 页 的间隙距离反馈来评估所计划的切除。这种组合还允许使用所计划的切除来评估最终的间 隙距离,而不是预先切除间隙距离,这可能最终并不准确。该组合还允许在所计划的切除之 后准确地计划软组织平衡(例如,股骨相对于胫骨的旋转)将是什么样,而无需实际执行切 除。这允许进行准确的计划,并且可以对切除进行修改。 在一示例中,技术1000可以包括通过参考平面(例如,胫骨切除平面或股骨水平 面)来显示测量的间隙距离和实际间隙距离和所计划的切除。在一示例中,股骨水平面可以 与所确定的胫骨平面一起使用,该胫骨平面从股骨水平面偏置几度。在另一示例中,可以在 运动范围测试之前执行胫骨切割。被切割的胫骨平面可以使用,或者可以对于股骨平面偏 置几毫米。在一示例中,可以使用股骨水平面,因为它在整个运动范围内(例如,与松弛无关 或基于切除的松弛,而不是骨头所在的位置或股骨水平面)对骨的运动是不可知的。 在一示例中,当膝盖展开时,韧带可能在一侧,这导致间隙距离的测量或软组织平 衡出现问题。使用所测量的间隙距离使用预先计划的切除,并考虑到用于参考的平面,可以 以更一致的方式进行测量。 在一示例中,运动范围测试可以包括参考骨头模型(例如,术前计划)来对齐胫骨, 以及对齐用于胫骨的追踪器(股骨也可以被对齐和追踪)。然后执行所述运动范围测试。在 整个运动范围测试中跟踪胫骨(例如,通过跟踪在整个运动范围内从计划的股骨或胫骨切 除到股骨或胫骨的间隙)。可以在用户界面上显示某一点处或整个范围内的间隙距离(例 如,最大间隙距离,整个运动范围内的间隙距离的动画或在运动范围的可选角度时的间隙 距离)。用户界面可以显示从预先计划的切除到股骨(例如,而不是从未切除的胫骨到未切 除的股骨)的间隙距离。 间隙距离可以使用光学跟踪器来测量,可以使用贯穿本公开内容描述的可调节间 隔器,例如可独立调节的内侧和外侧间隔器,或者位置传感器(例如,iAssist)。因为在运动 范围测试过程中可能会发生自然旋转,所以使用可独立调节的内侧和外侧间隔器可以允许 在整个运动范围内测量不同的间隙距离。 图11示出了根据一些实施例的具有可独立调节的内侧和外侧部件(分别为1104和 1106)的可调节间隔器1102。可调节间隔器1102可以在膝盖内使用,例如用于全或部分膝关 节置换术(例如,如以上关于图10所述)。可调节间隔器1102可以用于测量,确定或改变患者 的股骨和胫骨之间的间隙距离或压力差。例如,可调节间隔器1102可被放置在胫骨和股骨 之间(例如,在技术1000中在如上所述的胫骨切除之后)并且被充气以测量间隙距离或压 力,例如在整个运动范围测试过程中。 可调节间隔器1102可以由一个或多个泵(例如,内侧泵1105或外侧泵1107,或具有 阀的单一泵,该阀被配置为控制内侧部件1104还是外侧部件1106被充气)来充气。可调节间 隔器1102的内侧部件1104和外侧部件1106可以被独立地充气,调节(例如,经历充气中的增 大或放气),或被控制(例如,压力保持)。 可调节间隔器1102的内侧部件1104和外侧部件1106可被独立地充气到特定的间 隙距离。例如,如图11中的例子所示,在左侧,内侧部件1104被充气到18毫米(mm),而外侧部 件1106被充气到12毫米。这些间隙距离可以对应于内力,如在图11的右侧所示的。图11中的 例子示出内侧部件1104中压力为35牛顿(N),外侧部件1106中压力为52牛顿。间隙距离和力 还可以对应于由一个或多个泵施加的压力。对于图11的例子,内侧泵1105施加每平方英寸7 8 CN 111615359 A 说 明 书 6/12 页 磅(psi)的压力,对应于35N,这也可以对应于18mm的间隙距离。外侧泵1107施加12psi,对应 于52N和12mm的间隙距离。在一示例中,外科医生可以利用可调节间隔器1102将膝盖展开到 期望的力,并且可以在用户界面上输出实现内侧和外侧之间的平衡所需的股骨旋转。 可调节间隔器1102可以包括一个或多个传感器,例如霍尔效应传感器,以精确地 测量内侧部件1104或外侧部件1106中的间隙距离。例如,内侧部件1104和外侧部件1106可 各自具有霍尔效应传感器,以独立地测量相应部件中的间隙距离。在一示例中,霍尔效应传 感器可以基于所述间隙距离输出与磁场的变化相对应的电压。例如,可以将磁体放置在内 侧部件1104或外侧部件1106的自由端上,并且可以使用霍尔效应传感器基于来自被从可调 节间隔器1102的基部移开的自由端的磁场的变化来确定部件1104或1106的距离变化。在该 示例中,霍尔效应传感器可以设置于可调节间隔器1102的基部上(例如,在与部件1104或 1106之一的自由端相反的一端上)。 内侧泵1105或外侧泵1107可以由泵控制器控制。泵控制器可以耦合到机器人手术 设备(例如,ROSA),由其操作,或设置于机器人手术设备(例如,ROSA)内。例如,可以使用机 器人手术装置的处理器来执行泵控制器。机器人手术设备的显示器(或外部显示器)的用户 界面可以用于显示与可调节间隔器1102,泵控制器或内侧/外侧泵1105/1107相关的信息 (例如,间隙距离,力,压力等)。 可以使用诸如霍尔效应传感器的距离传感器来确定可调节间隔器的内侧或外侧 部件中的间隙距离。在一示例中,可以使用一个距离传感器,例如在内侧或外侧部件的中心 位置。在另一示例中,可以使用两个距离传感器,例如在内侧或外侧部件的任一端。在另一 示例中,可以使用三个传感器(例如,在1108处示出的传感器),例如一个在中心位置,两个 在内侧或外侧比较的任一端。传感器的其他配置(例如,在部件的拐角处,在部件的中间)可 以用于增加间隙距离测量的准确性。可以使用其他测量技术,包括使用间隙距离的光学跟 踪,飞行时间传感器,张力传感器等。间隙距离的传感器测量结果可以类似地用在图9的可 调节间隔器上。 图12示出了根据一些实施例的可调节间隔器(1202和1204)以及示出了可调节间 隔器(1202和1204)的效果的图形1200和1201。可调节间隔器(1202和1204)可以在膝盖内使 用,例如用于全或部分膝关节置换术。可调节间隔器(1202和1204)可用于测量,确定或改变 患者的股骨和胫骨之间的间隙距离或压力差。例如,可调节间隔器(1202和1204)可以被放 置在胫骨和股骨之间(例如,在胫骨切除之后)并且被充气以测量间隙距离或压力,例如在 整个运动范围测试过程中。 可调节间隔器被示出为处于对应于图形1200的第一受控配置1202和对应于图形 1201的第二受控配置1204。第一配置1202包括控制可调节间隔器,使得可调节间隔器的内 侧部件和外侧部件中的压力是固定的。固定的压力意思是从一个或多个泵输出的压力对于 每个部件来说,可调节间隔器的内侧部件和外侧部件,是相等的(例如7psi)。换句话说,可 调节间隔器的内侧和外侧部件可以自由改变间隙距离(例如,间隙距离不相等),但是施加 的压力(在每个部件的气囊内施用的空气或其他流体)相同。固定的压力还可以在每个部件 内产生相等的力(例如35N)(例如,当从固定端施加到自由端时,如图12中的向上箭头所 示)。 图形1200说明了在整个运动范围测试过程中对于固定压力来说可调节间隔器 9 CN 111615359 A 说 明 书 7/12 页 1202的间隙距离的变化。图形1200具有x轴,该x轴示出了运动范围测试的度数(例如,从对 于完全伸展的膝盖来说的零度开始,并且向着屈曲向上增加度数)。图形1200的y轴示出了 间隙距离(例如,在图12所示的示例中,在15mm至25mm之间波动)。在图形1200上可调节间隔 器1202的内侧部件(M)和外侧部件(L)中间隙距离被单独示出。图形1200可以被输出到显示 器(例如,机器人手术系统的显示器)上的用户界面,以供外科医生评估。在一示例中,可以 从运动范围测试确定每个部件的最大或最小间隙距离。该最大或最小间隙距离(在任一部 件中的或在两个部件中的最大值或最小值)可用于调整手术计划(例如术前计划),例如通 过改变所计划的股骨切除的参数,改变植入物的尺寸,或调整软组织(例如放松)。术前计划 的改变可以自动进行,例如通过机械臂改变计划切除的参数。 第二配置1204包括控制可调节间隔器,使得可调节间隔器的内侧部件和外侧部件 中的间隙距离是固定的。固定的间隙距离意思是从一个或多个泵输出的压力对于每个部件 (可调节间隔器的内侧和外侧)来说是变化的(例如,如图12中所示为7psi和12psi)。因此, 可调节间隔器的内侧和外侧部件被固定到一定的间隙距离,该间隙距离可以被确定为术前 计划的一部分或对术前计划的术间改变。可以在运动范围测试过程中调整压力的变化,以 保持两个部件之间的间隙距离相等。压力的变化可以对应于力的变化(例如,7psi为35N, 12psi为52N),如从固定端施加到自由端,在图12中的向上箭头所示。 图形1201示出了在整个运动范围测试过程中对于可调节间隔器1202的各部件中 的固定且相等的间隙距离来说压力的变化。图形1201具有x轴,该x轴示出了运动范围测试 的度数(例如,从对于完全伸展的膝盖来说的零度开始,并且向着屈曲向上增加度数)。图形 1201的y轴可以示意压力(例如,从泵施加)或由每个部件或在每个部件内施加的力(例如, 在图12所示的示例中,示出了力)。在图形1201上,可调节间隔器1202的内侧部件(M)和外侧 部件(L)中的压力的变化被单独示出。图形1201可以被输出到显示器(例如,机器人手术系 统的显示器)上的用户界面,以供外科医生评估。在一示例中,可以从运动范围测试确定每 个部件的最大或最小压力。该最大或最小压力(在任一部件中的或在两个部件中的最大值 或最小值)可用于调整手术计划(例如术前计划),例如通过改变所计划的股骨切除的参数, 改变植入物的尺寸,或调整软组织(例如放松)。术前计划的改变可以自动进行,例如通过机 械臂改变计划切除的参数。 在一示例中,可调节间隔器1202的仅一侧(例如,内侧或外侧)可以被充气。单充气 侧可用于对膝关节进行压力测试。在压力测试(可以在胫骨切割之前或之后进行)期间,外 侧或内侧可被充气以评估韧带张力并找到该侧的间隙距离。对充气的一侧或两侧(两侧和 内侧)进行应力测试,每次一侧,可以作为在两侧(内侧和外侧)被充气的情况下进行的运动 范围测试的替代或附加来进行。 图13示出了根据一些实施例的用于将可调节间隔器与机器人手术设备一起使用 的系统1300。系统1300可以包括机器人手术系统或设备(例如ROSA机器人手术系统),其可 以包括用户界面和机械臂。机器人手术系统或设备可以包括泵,被配置为保持或支撑泵,与 泵接口等。在另一示例中,系统1300可以包括与机器人手术系统或设备分离的泵。泵(可能 包括一个以上的泵)可用于控制可调节间隔器。在泵由机器人系统或设备控制的示例中,机 器人系统或设备的处理器可以控制向可调节间隔器的一个或多个部件输出的压力。机器人 手术系统或设备可用于在运动范围测试期间控制泵,比如用于评估可调节间隔器的内侧或 10 CN 111615359 A 说 明 书 8/12 页 外侧部件中的间隙距离或压力。 图14示出了根据一些实施例的在部分膝关节置换术中使用的单踝可调节间隔器。 图14中所示的图1400示出了单踝可调节间隔器,其可以使用(例如,由机器人手术系统控制 的)泵来充气或调节。在另一示例中,可以使用具有内侧和外侧部件的可调节间隔器,例如 当与部分膝关节置换术一起使用时或者当在单一膝盖的内侧和外侧进行单踝手术时仅使 一侧充气。可以在运动范围测试过程中使用单侧充气的部件,将间隙距离保持为特定间隙 距离,或者将压力保持为特定压力(例如,来自手术计划的特定间隙距离或特定压力)。在运 动范围测试过程中可以确定最小张力。可以输出该最小张力,例如用于在用户界面上显示 或用于自动调整手术计划的参数。 图15示出了根据一些实施例的流程图,该流程图示出了用于在外科膝关节手术中 使用可调节间隔器的技术1500。在一示例中,可以在初始胫骨切割之后执行技术1500。在另 一示例中,在膝关节置换术期间的任何切割之前执行技术1500。可以使用机器人手术设备 来执行技术1500。可以使用泵执行以下描述的充气操作,该泵可以由机器人手术设备的泵 控制器自动控制。机器人手术设备可以包括显示器,以呈现用于呈现技术1500的结果的用 户界面。 技术1500包括操作502,以使可调节间隔器的第一可调节部件充气以例如在患者 的内侧上分离膝盖的股骨和胫骨。技术1500包括操作504,以使可调节间隔器的第二可调节 部件充气以例如在患者的外侧上分离膝盖的股骨和胫骨。在一示例中,第二可调节部件是 相对于第一可调节部件可独立调节的。 技术1500包括操作506,以选择在可调节部件中使用相等的压力还是相等的间隙 距离。相等的压力或相等的间隙距离可以使用术前计划来确定。当选择相等的压力时,技术 1500包括操作508。操作508包括,在运动范围测试过程中,通过允许由第一可调节部件引起 的股骨和胫骨之间的内侧间隙距离或由第二可调节部件引起的股骨和胫骨之间的外侧间 隙距离变化来保持第一可调节部件和第二可调节部件中的压力相等。 技术1500包括操作510,以在选择相等的压力时确定运动范围测试过程中的最大 间隙距离。可以使用传感器(例如,霍尔效应传感器)或使用股骨和胫骨的光学跟踪来确定 此最大间隙距离。当选择相等的间隙距离时,技术1500包括操作512。操作512包括,在运动 范围测试过程中,通过增加或减小第一可调节部件或第二可调节部件中的压力来在由第一 可调节部件引起的膝盖内侧间隙和由第二可调节部件引起的膝盖外侧间隙之间保持相等 的间隙距离。 技术1500包括操作514,以在选择相等的间隙距离时确定运动范围测试过程中的 最大压力。可以使用传感器(例如,诸如eLibra设备的压力传感器)或使用在使部件充气的 泵处的反馈来确定该最大压力。技术1500包括操作516以输出结果来在用户界面上显示,诸 如最大间隙距离或最大压力。在另一示例中,结果可用于调整术前计划。例如,结果可用于 基于最大间隙距离(例如,外侧或内侧或两者)来确定植入物。技术1500可以包括重复运动 范围测试,例如在增大或减小上述相等的压力或上述相等的间隙距离之后重复运动范围测 试。在一示例中,例如基于整个运动范围的压力变化,可以使用每侧具有不同高度的植入 物。 在一示例中,上述压力和间隙距离可被允许在运动范围测试过程中改变。在该示 11 CN 111615359 A 说 明 书 9/12 页 例中,可以使用3D计划(例如术前计划)来设置间隙距离或压力的极限或目标。例如,可以为 不同的角度(例如,从伸展到弯曲)设置最大压力,或者可以设置最大间隙。在一示例中,操 作506可以包括使用3D计划的确定。然后,技术1500可进行到操作511,用于在运动范围测试 期间基于该3D计划保持间隙距离或压力。根据该3D计划,在运动范围测试的某些部分间隙 距离可以保持恒定,而在运动范围测试的其他部分压力可以保持恒定。技术1500可以包括 操作515,该操作515确定运动范围测试过程中(例如,在测试的不同部分,分别基于间隙距 离保持恒定或压力保持恒定时)的最大压力或最大间隙距离。 图16示出了根据一些实施例的用于执行本文描述的技术的系统600。系统600包括 联接至泵604的机器人手术设备602,其可用于控制间隔器设备606。间隔器设备606包括内 侧可调节部件608和外侧可调节部件612。系统600可以包括显示设备614,其可以用于显示 用户界面616。系统600可以包括控制系统618(例如,机器人控制器),其包括处理器620和存 储器622。在一示例中,显示设备614可以耦合至机器人手术设备602,间隔器设备606或控制 系统618中的一个或多个。 在一示例中,显示设备614可以用于在用户界面616上显示软组织过程的结果。所 述结果可以包括间隙距离或压力信息,例如在运动范围测试期间的不同角度。间隙距离或 压力信息可以从传感器(例如传感器610)得出,该传感器可以在内侧可调节部件608或外侧 可调节部件612上或在间隔器设备606上或内部的其他位置。传感器610可以是霍尔效应传 感器。间隙距离或压力信息可能与膝关节有关,并且运动范围测试可以从伸展到屈曲执行 (反之亦然)。 图17示出了根据一些实施例的示例机器1700的框图,本文所讨论的技术中的任何 一种或多种可以在其上执行。在替代实施例中,机器1700可以作为独立设备操作,或者可以 连接(例如联网)到其他机器。在联网配置中,机器1700可以在服务器-客户端网络环境中以 服务器机器、客户端机器或两者的能力运行。在一示例中,机器1700可以在对等(P2P)(或其 他分布式)网络环境中充当对等机器。机器1700可以是个人计算机(PC),平板电脑,机顶盒 (STB),个人数字助理(PDA),移动电话,网络设备,网络路由器,交换机或网桥,或任何能够 执行指令(顺序的或其他方式)的机器,这些指令指定了该机器要执行的操作。此外,虽然仅 示出了单一机器,但是术语“机器”也应被理解为包括机器的任何集合,这些机器单独地或 共同地执行一组(或多组)指令以执行本文讨论的方法中的任何一个或多个,例如云计算, 软件即服务(SaaS),其他计算机集群配置。 机器(例如,计算机系统)1700可以包括硬件处理器1702(例如,中央处理单元 (CPU),图形处理单元(GPU),硬件处理器核,或其任意组合),主存储器1704和静态存储器 1706,其中的一些或全部可以经由互连链路(例如,总线)1708彼此通信。机器1700可以进一 步包括显示单元1710,字母数字输入设备1712(例如,键盘),和用户界面(UI)导航设备1714 (例如,鼠标)。在一示例中,显示单元1710,输入设备1712和UI导航设备1714可以是触摸屏 显示器。机器1700可以另外包括存储设备(例如,驱动单元)1716,信号产生设备1718(例如, 扬声器),网络接口设备1720,以及一个或多个传感器1721,比如全球定位系统(GPS)传感 器,指南针,加速度计或其他传感器。机器1700可以包括输出控制器1728,比如串行(例如, 通用串行总线(USB)),并行,或其他有线或无线(例如,红外(IR),近场通信(NFC)等))连接 以通信或控制一个或多个外围设备(例如打印机,读卡器等)。 12 CN 111615359 A 说 明 书 10/12 页 存储设备1716可以包括机器可读介质1722,该机器可读介质1722上存储有一组或 多组数据结构或指令1724(例如,软件),这些数据结构或指令1724由本文描述的任何一种 或多种技术或功能来体现或利用。在机器1700执行指令1724期间,指令1724还可以全部或 至少部分地驻留在主存储器1704内,静态存储器1706内或硬件处理器1702内。在一示例中, 硬件处理器1702,主存储器1704,静态存储器1706或存储设备1716的一个或任意组合可以 构成机器可读介质。 尽管机器可读介质1722被示为单一介质,但是术语“机器可读介质”可以包括被配 置用于存储所述一个或多个指令1724的单一介质或多种介质(例如,集中式或分布式数据 库和/或相关联的缓存和服务器)。术语“机器可读介质”可以包括下述任何介质:所述任何 介质能够存储、编码或承载由机器1700执行的指令并且使得机器1700执行本公开的任何一 种或多种技术,或者能够存储、编码或承载由此类指令使用或与之关联的数据结构。非限制 性机器可读介质示例可以包括固态存储器以及光学和磁性介质。 指令1724还可以使用多种传输协议(例如,帧中继、互联网协议(IP)、传输控制协 议(TCP)、用户数据报协议(UDP)、超文本传输协议(HTTP)等)中的任何一种、经由网络接口 设备1720使用传输介质在通信网络1726上传输或接收。示例性通信网络可以包括局域网 (LAN),广域网(WAN),分组数据网络(例如,因特网),移动电话网络(例如,蜂窝网络),普通 老式电话(POTS)网络,和无线数据网络(例如,被称为 的电气和电子工程师协会 (IEEE)802.11系列标准,被称为 的IEEE 802.16系列标准),IEEE 802.15.4系列 标准,对等(P2P)网络等。在一示例中,网络接口设备1720可以包括一个或多个物理插孔(例 如,以太网,同轴或电话插孔)或一个或多个天线以连接到通信网络1726。在一示例中,网络 接口设备1720可以包括多个天线,以使用单输入多输出(SIMO)、多输入多输出(MIMO)或多 输入单输出(MISO)技术中的至少一个进行无线通信。术语“传输介质”应被认为包括能够存 储、编码或承载由机器1700执行的指令并且包括数字或模拟通信信号的任何无形介质,或 用于促进这种软件的通信的其他无形介质。 这些非限制性示例中的每一个可以独立存在,或者可以与一个或多个其他示例以 各种排列或组合的方式结合。 示例1是一种用于在外科手术过程中评估软组织的手术设备,包括:泵,用于:充气 可调节间隔器的第一可调节部件以在患者的内侧上分离膝盖的股骨和胫骨;充气所述可调 节间隔器的第二可调节部件以在患者的外侧上分离膝盖的股骨和胫骨,所述第二可调节部 件是相对于所述第一可调节部件可独立调节的;和在运动范围测试过程中,通过允许由第 一可调节部件引起的股骨和胫骨之间的内侧间隙距离或由第二可调节部件引起的股骨与 胫骨之间的外侧间隙距离变化来在第一可调节部件和第二可调节部件中保持相等的压力; 和处理器,用于:确定运动范围测试过程中的最大间隙距离;并输出所述最大间隙距离以显 示在用户界面上。 在示例2中,示例1的主题包括,所述泵还用于在重复的运动范围测试过程中减小 所述相等的压力。 在示例3中,示例1-2的主题包括,所述处理器使用术前计划来确定所述相等的压 力。 在示例4中,示例3的主题包括,所述处理器还基于所述最大间隙距离来调整所述 13 CN 111615359 A 说 明 书 11/12 页 术前计划。 在示例5中,示例1-4的主题包括,在膝关节置换术期间所述运动范围测试发生在 胫骨切割之后。 在示例6中,示例1-5的主题包括,所述处理器还基于最大内侧间隙距离和最大外 侧间隙距离来确定植入物,所述植入物具有内侧的第一高度和外侧的第二高度,所述第二 高度与所述第一高度不同。 在示例7中,示例1-6的主题包括,为了确定所述最大间隙距离,所述处理器使用对 股骨和胫骨的光学跟踪。 在示例8中,示例1-7的主题包括,所述手术设备是机器人手术设备,其中,所述处 理器操作机器人控制器,其中,所述泵由所述处理器控制,并且其中,所述机器人手术设备 包括显示器,所述显示器被配置用于显示包括所述最大间隙距离的用户界面。 示例9是一种用于在外科手术过程中评估软组织的手术设备,包括:泵,用于:充气 可调节间隔器的第一可调节部件以在患者的内侧上分离膝盖的股骨和胫骨;充气所述可调 节间隔器的第二可调节部件以在患者的外侧上分离膝盖的股骨和胫骨,所述第二可调节部 件是相对于所述第一可调节部件可独立调节的;在运动范围测试过程中,通过增加或减小 在第一可调节部件或第二可调节部件中的压力,保持在第一可调节部件导致的膝盖内侧间 隙和第二可调节部件导致的膝盖外侧间隙之间的相等的间隙距离;和处理器,用于:确定运 动范围测试过程中的最大压力;并输出所述最大压力以显示在用户界面上。 在示例10中,示例9的主题包括,进一步减小所述相等的间隙距离并再次执行所述 运动范围测试。 在示例11中,示例9-10的主题包括,所述处理器使用术前计划,所述术前计划用于 确定所述相等的间隙距离. 在示例12中,示例11的主题包括,所述处理器还基于所述最大压力来调整所述术 前计划。 在示例13中,示例9-12的主题包括,在膝关节置换术期间所述运动范围测试发生 在胫骨切割之后。 在示例14中,示例9-13的主题包括,所述处理器还基于最大内侧压力和最大外侧 压力来确定植入物,所述植入物具有内侧的第一高度和外侧的第二高度,所述第二高度与 所述第一高度不同。 在示例15中,示例9-14的主题包括,为了确定所述最大压力,所述处理器使用对股 骨和胫骨的光学跟踪。 在示例16中,示例9-15的主题包括,所述手术设备是机器人手术设备,其中,所述 处理器操作机器人控制器,其中,所述泵由所述处理器控制,并且其中,所述机器人手术设 备包括显示器,所述显示器被配置用于显示包括所述最大间隙距离的用户界面。 示例17是一种方法,包括:在膝盖的股骨和胫骨之间插入试验件,该试验件包括第 一高度的内侧间隔器和不同于第一高度的第二高度的外侧间隔器;使用压力传感器设备, 在试验件在位的情况下,在整个运动范围测试过程中测量膝盖内侧的压力和膝盖外侧的压 力;确定运动范围测试过程中的最大压力;和输出所述最大压力以显示在用户界面上。 在示例18中,示例17的主题包括,通过替换内侧间隔器或外侧间隔器并再次执行 14 CN 111615359 A 说 明 书 12/12 页 所述运动范围测试来减小所述第一高度或所述第二高度。 在示例19中,示例17-18的主题包括,使用术前计划来确定所述第一高度和所述第 二高度。 在示例20中,示例19的主题包括,基于所述最大压力来调整所述术前计划。 在示例21中,示例17-20的主题包括,在膝关节置换术期间在胫骨切割之后执行所 述运动范围测试。 在示例22中,示例17-21的主题包括,基于最大内侧压力和最大外侧压力来确定植 入物,所述植入物具有内侧的第一高度和外侧的第二高度,所述第二高度与所述第一高度 不同。 在示例23中,示例17-22的主题包括,使用iAssist设备来确定所述最大压力。 示例24是至少一种机器可读介质,其包括指令,这些指令在由处理电路执行时使 处理电路执行用于实现示例1-23中任何一个的操作。 示例25是包括用于实现示例1-23中任何一个的装置的设备。 示例26是用于实现示例1-23中任何一个的系统。 示例27是用于实现示例1-23中任何一个的方法。 本文描述的方法示例可以至少部分是机器或计算机实现的。一些示例可以包括编 码有指令的计算机可读介质或机器可读介质,所述指令可操作以配置电子设备以执行如以 上示例中所述的方法。这样的方法的实现可以包括代码,例如微代码,汇编语言代码,高级 语言代码等。这样的代码可以包括用于执行各种方法的计算机可读指令。该代码可以构成 计算机程序产品的一部分。此外,在一示例中,代码可以有形地存储在一个或多个易失性, 非暂时性或非易失性有形计算机可读介质上,例如在执行期间或在其他时间。这些有形的 计算机可读介质的示例可以包括、但不限于硬盘,可移动磁盘,可移动光盘(例如光盘和数 字视频磁盘),盒式磁带,存储卡或存储棒,随机存取存储器(RAM),只读存储器(ROM)等。 15 CN 111615359 A 说 明 书 附 图 1/17 页 图1 16 CN 111615359 A 说 明 书 附 图 2/17 页 图2 17 CN 111615359 A 说 明 书 附 图 3/17 页 图3 18 CN 111615359 A 说 明 书 附 图 4/17 页 图4 19 CN 111615359 A 说 明 书 附 图 5/17 页 图5 20 CN 111615359 A 说 明 书 附 图 6/17 页 图6 21 CN 111615359 A 说 明 书 附 图 7/17 页 图7 22 CN 111615359 A 说 明 书 附 图 8/17 页 图8 23 CN 111615359 A 说 明 书 附 图 9/17 页 图9 24 CN 111615359 A 说 明 书 附 图 10/17 页 图10 25 CN 111615359 A 说 明 书 附 图 11/17 页 图11 26 CN 111615359 A 说 明 书 附 图 12/17 页 图12 27 CN 111615359 A 说 明 书 附 图 13/17 页 图13 28 CN 111615359 A 说 明 书 附 图 14/17 页 图14 29 CN 111615359 A 说 明 书 附 图 15/17 页 图15 30 CN 111615359 A 说 明 书 附 图 16/17 页 图16 31 CN 111615359 A 说 明 书 附 图 17/17 页 图17 32











