
技术摘要:
本说明书公开了一种无人驾驶设备的控制方法及装置,通过各图像采集器采集多路图像数据,通过MIPI‑D‑PHY传输协议,从采集到的各图像数据中逐行提取出各像素行的像素数据,将提取出的各图像数据中相同像素行的像素数据进行打包,分别得到各像素行所对应的数据包,将各 全部
背景技术:
随着无人驾驶技术的不断发展,无人驾驶设备已经在各种领域中得到的广泛的应 用,在极大提高工作效率的同时,也给人们的日常生活带来了极大的方便。 为了保证无人驾驶设备的安全行驶,通常需要在无人驾驶设备上设置多个图像采 集器,并于多个图像采集器采集到的图像数据,对无人驾驶设备自身实施控制。在现有技术 中,无人驾驶设备通常使用集线器HUB来传输采集到的图像数据,然而,采用HUB进行数据传 输时,协议开销以及所占用的内存往往较高,而随着图像采集器数量的增加,无人驾驶设备 将采集到的图像数据在其内部进行数据传输时所面临的传输压力也将越大,这样就很可能 会出现HUB宕机的情况,从而极大的降低无人驾驶设备的数据传输效率,给无人驾驶设备对 自身实施的控制带来极大的影响。 所以,如何能够有效地提高无人驾驶设备的数据传输效率,保证无人驾驶设备能 够顺利地对自身实施控制,则是一个亟待解决的问题。
技术实现要素:
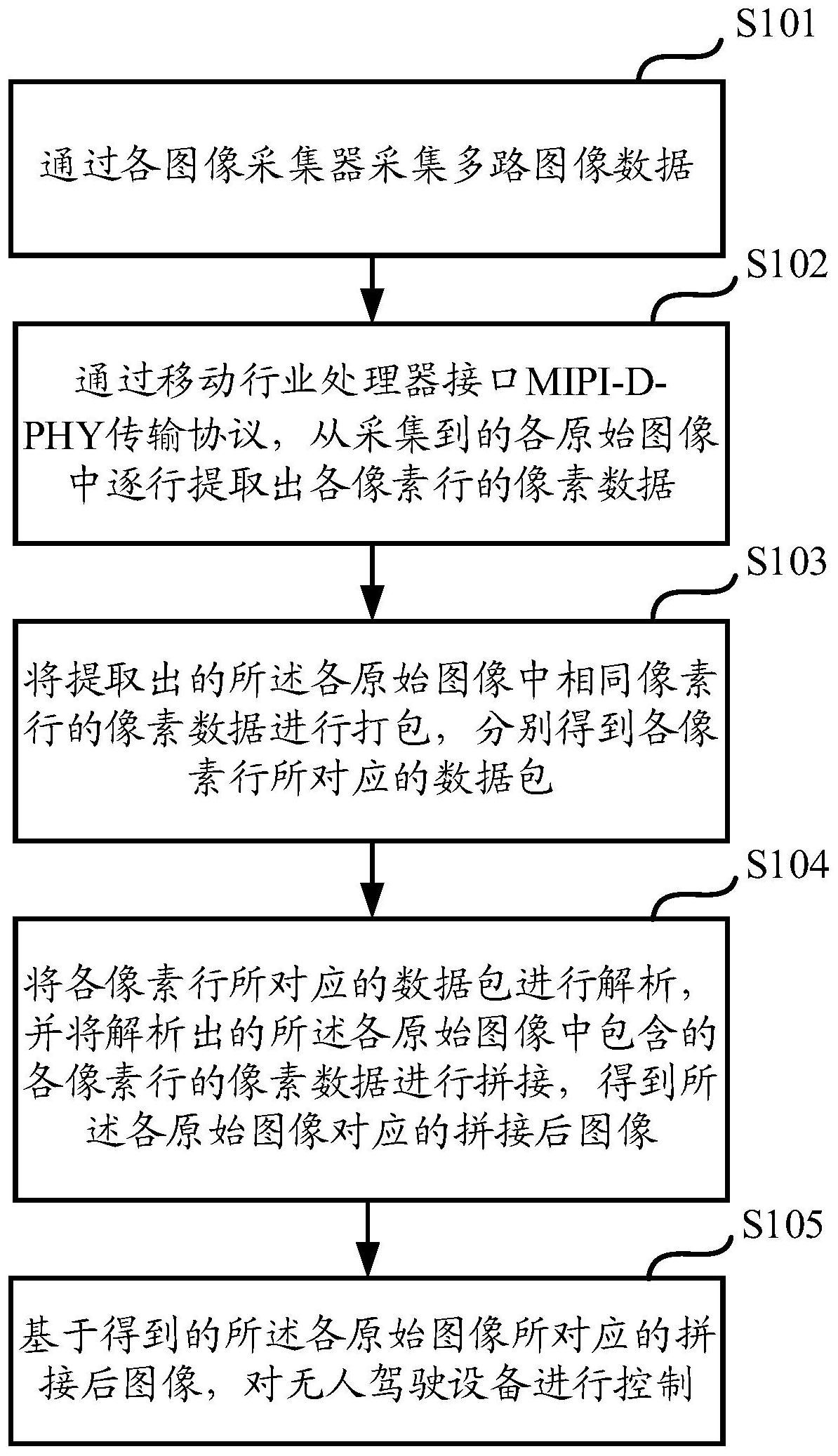
本说明书提供一种无人驾驶设备的控制方法及装置,以部分的解决现有技术存在 的上述问题。 本说明书采用下述技术方案: 本说明书提供了一种无人驾驶设备的控制方法,包括: 通过各图像采集器采集多路图像数据; 通过移动行业处理器接口MIPI-D-PHY传输协议,从采集到的各图像数据中逐行提 取出各像素行的像素数据; 将提取出的所述各图像数据中相同像素行的像素数据进行打包,分别得到各像素 行所对应的数据包; 将各像素行所对应的数据包进行解析,并将解析出的所述各图像数据中包含的各 像素行的像素数据进行拼接,得到所述各图像数据对应的拼接后图像; 基于得到的所述各图像数据所对应的拼接后图像,对无人驾驶设备进行控制。 可选地,通过移动行业处理器接口MIPI-D-PHY传输协议,从采集到的各图像数据 中逐行提取出各像素行的像素数据,具体包括: 通过所述MIPI-D-PHY传输协议,将第N像素行的像素数据逐行从各图像数据中进 行提取,并在确定出所述各图像数据中第N像素行的像素数据提取完毕后,再将第N 1像素 行的像素数据逐行从所述各图像数据中进行提取,直至将所述各图像数据中各像素行的像 素数据全部提取为止,N为不小于1的整数。 4 CN 111741259 A 说 明 书 2/11 页 可选地,通过移动行业处理器接口MIPI-D-PHY传输协议,从采集到的各图像数据 中逐行提取出各像素行的像素数据,具体包括: 针对每个图像数据,通过所述MIPI-D-PHY传输协议中的PPI协议,对从该图像数据 中提取出的像素行的像素数据进行标识; 将提取出的所述各图像数据中相同像素行的像素数据进行打包,分别得到各像素 行所对应的数据包,具体包括: 针对每个像素行,将该图像数据中标识后的该像素行的像素数据与其他图像数据 中标识后的该像素行的像素数据进行打包,得到针对所述各图像数据中该像素行所对应的 数据包。 可选地,将解析出的所述各图像数据中包含的各像素行的像素数据进行拼接,具 体包括: 将各数据包中标识相同的像素行的像素数据进行拼接,得到所述各图像数据对应 的拼接后图像。 可选地,将各像素行所对应的数据包进行解析,并将解析出的所述各图像数据中 包含的各像素行的像素数据进行拼接,得到所述各图像数据对应的拼接后图像,具体包括: 针对每个图像数据,确定采集该图像数据的图像采集器所对应的各缓存空间; 通过图像处理器将各像素行所对应的数据包进行解析,并将解析出的该图像数据 中的第N像素行的像素数据存储在采集该图像数据的图像采集器所对应的第M个缓存空间 中,N为不小于1的整数,M为不小于1的整数; 将缓存的该图像数据中第N像素行的像素数据与其他图像数据中第N像素行的像 素数据同步输出进行图像拼接,并同时将解析出的该图像数据中的第N 1像素行的像素数 据存储在采集该图像数据的图像采集器所对应的第M 1个缓存空间。 可选地,基于得到的所述各图像数据所对应的拼接后图像,对无人驾驶设备进行 控制之前,所述方法还包括: 针对得到的每个拼接后图像,若确定该拼接后图像满足预设的图像完整度和/或 图像清晰度,确定该拼接后图像为正常图像,否则确定该拼接后图像为异常图像。 可选地,基于得到的所述各图像数据所对应的拼接后图像,对无人驾驶设备进行 控制,具体包括: 从得到的各拼接后图像中确定正常图像; 基于所述正常图像,对所述无人驾驶设备进行控制。 本说明书提供了一种无人驾驶设备的控制装置,包括: 获取模块,用于通过各图像采集器采集多路图像数据; 提取模块,用于通过移动行业处理器接口MIPI-D-PHY传输协议,从采集到的各图 像数据中逐行提取出各像素行的像素数据; 打包模块,用于将提取出的所述各图像数据中相同像素行的像素数据进行打包, 分别得到各像素行所对应的数据包; 解析模块,用于将各像素行所对应的数据包进行解析,并将解析出的所述各图像 数据中包含的各像素行的像素数据进行拼接,得到所述各图像数据对应的拼接后图像; 控制模块,用于基于得到的所述各图像数据所对应的拼接后图像,对所述装置进 5 CN 111741259 A 说 明 书 3/11 页 行控制。 本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所 述计算机程序被处理器执行时实现上述无人驾驶设备的控制方法。 本说明书提供了一种无人驾驶设备,包括存储器、处理器及存储在存储器上并可 在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述无人驾驶设备的控制 方法。 本说明书采用的上述至少一个技术方案能够达到以下有益效果: 在本说明书提供的无人驾驶设备的控制方法中,可以通过各图像采集器采集多路 图像数据,通过移动行业处理器接口MIPI-D-PHY传输协议,从采集到的各图像数据中逐行 提取出各像素行的像素数据,将提取出的所述各图像数据中相同像素行的像素数据进行打 包,分别得到各像素行所对应的数据包,将各像素行所对应的数据包进行解析,并将解析出 的各图像数据中包含的各像素行的像素数据进行拼接,得到各图像数据对应的拼接后图 像,并基于得到的各拼接后图像,对无人驾驶设备进行控制。 从上述方法可以看出,由于无人驾驶设备可以通过MIPI-D-PHY传输协议实现内部 的数据传输,这样不仅能够有效的提高数据传输效率,还能够有效的降低数据传输过程中 所消耗的系统资源,从而在提高数据传输效率的同时,还有效地保证无人驾驶设备能够基 于采集到的图像数据快速的对自身实施控制,保障了无人驾驶设备在行驶过程中的安全 性。 附图说明 此处所说明的附图用来提供对本说明书的进一步理解,构成本说明书的一部分, 本说明书的示意性实施例及其说明用于解释本说明书,并不构成对本说明书的不当限定。 在附图中: 图1为本说明书提供的一种无人驾驶设备的控制方法流程示意图; 图2为本说明书提供的无人驾驶设备对像素行的像素数据进行标识的示意图; 图3为本说明书提供的无人驾驶设备中数据传输的架构示意图; 图4为本说明书提供的一种无人驾驶设备的控制装置示意图; 图5为本说明书提供的对应于图1的无人驾驶设备示意图。











