
技术摘要:
本发明提供多测量数据提取建筑的方法、装置、电子设备及存储介质,通过对雷达数据和遥感数据进行叠置处理,根据相交部分面积大小判断是植被还是受投影差影响的部分,从而在雷达数据中将真实的植被部分剔除,由此可以消除投影差的影响,提高建筑物提取的准确率。
背景技术:
建筑物作为城市或城郊地面的重要特征,在城市规划、灾害预报、资源勘探、地理 信息系统库更新、数字化城市以及军事侦察等领域都有着重要的应用。 近年来,随着雷达技术的快速发展,融合高分辨率遥感影像数据与机载雷达两种 数据用于建筑物检测的研究已经引起研究人员的关注。 何曼芸等人提出的“融合光谱特征何几何特征的多测量数据提取建筑的方法”,通 过点云数据与航空影像数据的配准,实现了点云数据光谱信息的提取,运用随机森林方法 实现了建筑物点的提取。 王雪等人提出的“利用机载LiDAR数据和高分辨率图像提取复杂城区建筑物”,结 合高分辨率影像和机载雷达数据的优势,充分利用光谱、纹理、形状和高度数据实现了复杂 城区建筑物的分类与提取。 潘莉莉等人提出的“融合LiDAR点云和CCD影像的建筑物轮廓提取方法研究”,从点 云中提取建筑物的概略主方向,在主方向约束下,用Hough变换进行影像线段的提取,最后 基于雷达密度分析和K-means聚类方法提取建筑物轮廓。 上述研究大多考虑到了高分辨率遥感影像的光谱信息和点云数据的高程信息,但 由于高分辨率遥感影像中存在投影差,无法与机载雷达数据直接套合,会降低建筑物提取 率。
技术实现要素:
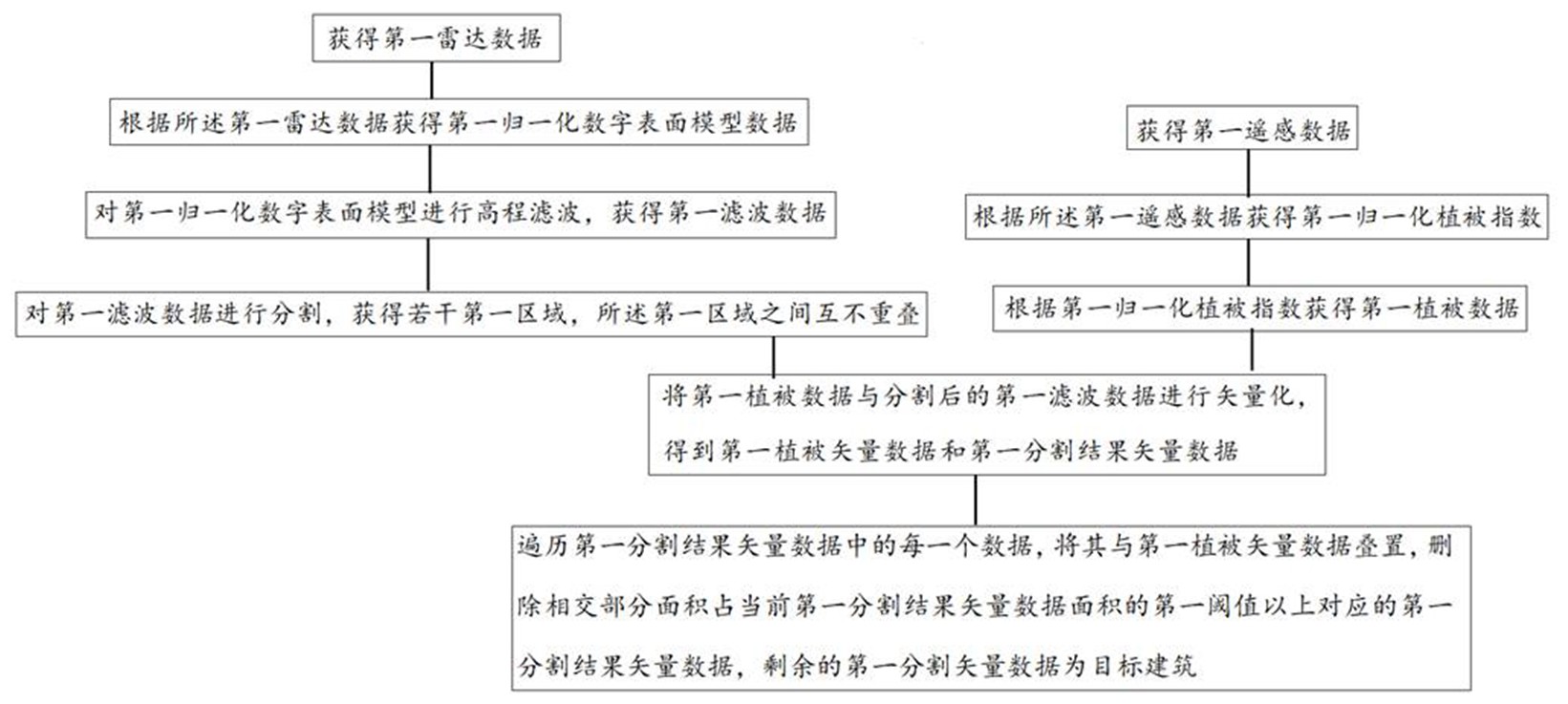
本发明目的在于提供一种建筑物的提取方法,用于解决现有的遥感影像与雷达数 据无法套合从而导致提取建筑物时提取率低的技术问题。 为达成上述目的,本发明提出如下技术方案: 多测量数据提取建筑的方法, 获得第一雷达数据; 根据所述第一雷达数据获得第一归一化数字表面模型数据; 对第一归一化数字表面模型进行高程滤波,获得第一滤波数据; 对第一滤波数据进行分割,获得若干第一区域,所述第一区域之间互不重叠; 获得第一遥感数据; 根据所述第一遥感数据获得第一归一化植被指数; 根据第一归一化植被指数获得第一植被数据; 将第一植被数据与分割后的第一滤波数据进行矢量化,得到第一植被矢量数据和第一 分割结果矢量数据; 遍历第一分割结果矢量数据中的每一个数据,将其与第一植被矢量数据叠置,删除相 5 CN 111583269 A 说 明 书 2/8 页 交部分面积占当前第一分割结果矢量数据面积的第一阈值以上对应的第一分割结果矢量 数据,剩余的第一分割矢量数据为目标建筑。 由第一数字表面模型数据和第一数据高程模型数据进行差值运算获得第一归一 化数字表面模型数据; 其中, 根据第一雷达数据插值获得第一数字表面模型数据,包括: 确定第一数字表面模型格网尺寸; 确定第一数字表面模型格网内每个网格的第一高程数据,所述第一高程数据为当前网 格内唯一的激光脚点的高程值; 或当前网格内不止一个激光脚点且当前网格内激光脚点高程最大值与高程最小值的 高差大于第二阈值时,所述第一高程数据为当前网格内激光脚点的高程最大值; 或当前网格内不止一个激光脚点且当前网格内激光脚点高程最大值与高程最小值的 高差小于第二阈值时,所述第一高程数据为当前网格内激光脚点的高程平均值; 或当前网格内不止一个激光脚点且当前网格内无激光脚点时,根据当前网格8邻域网 格中的激光脚点利用反距离加权方法,确定当前网格的第一高程数据。 进一步的,在本发明中,根据所述第一雷达数据获得第一数据高程模型数据,包 括: 确定第一数据高程模型数据格网尺寸与第一数字表面模型格网尺寸相同; 确定第一数据高程模型数据格网中每个网格的第一高程数据,所述第一高程数据为当 前网格内唯一的激光脚点的高程值; 或当前网格内不止一个激光脚点且当前网格内激光脚点高程最大值与高程最小值的 高差大于第二阈值时,所述第一高程数据为当前网格内激光脚点的高程最小值; 或当前网格内不止一个激光脚点且当前网格内激光脚点高程最大值与高程最小值的 高差小于第二阈值时,所述第一高程数据为当前网格内激光脚点的高程平均值; 或当前网格内不止一个激光脚点且当前网格内无激光脚点时,所述第一高程数据为当 前网格8邻域网格中与当前网格距离最近的激光脚点的高程值; 确定若干种子网格,遍历每个种子网格,采用区域生长方法比较当前种子网格与其8邻 域网格内的高程值并获得高程差,将高程差小于第三阈值时对应的邻域网格与当前种子网 格合并,由此形成若干个连通区域,所述连通区域互不重叠,完成分割; 从分割后的最大的连通区域中选择地面点,利用普通克里金插值法内插得到第一数据 高程模型数据。 进一步的,在本发明中,删除第一归一化数字表面模型数据中小于第四阈值的部 分完成高程滤波,所述第四阈值为城市建筑物的最低高度。 进一步的,在本发明中,在第一归一化数字表面模型数据中,确定若干种子网格, 遍历每个种子网格,采用区域生长方法比较当前种子网格与其8邻域网格内的高程值并获 得高程差,将高程差小于第三阈值时对应的邻域网格与当前种子网格合并,由此形成若干 个第一区域,完成分割。 进一步的,在本发明中,所述第一阈值为50%。 有益效果: 6 CN 111583269 A 说 明 书 3/8 页 由以上技术方案可知,本发明考虑了遥感影像数据中存在投影差,与雷达数据存在不 一致性,无法直接融合,具体通过两次滤波,一次以高程滤波方式滤除低矮植被,一次以空 间叠置分析方式,通过判断两种数据之间的交叠面积比例滤除植被,该过程使得投影差的 影响得以消除,从而降低将建筑物判别为植被的错误率,提高了建筑物的识别率。 应当理解,前述构思以及在下面更加详细地描述的额外构思的所有组合只要在这 样的构思不相互矛盾的情况下都可以被视为本公开的发明主题的一部分。 结合附图从下面的描述中可以更加全面地理解本发明教导的前述和其他方面、实 施例和特征。本发明的其他附加方面例如示例性实施方式的特征和/或有益效果将在下面 的描述中显见,或通过根据本发明教导的











