
技术摘要:
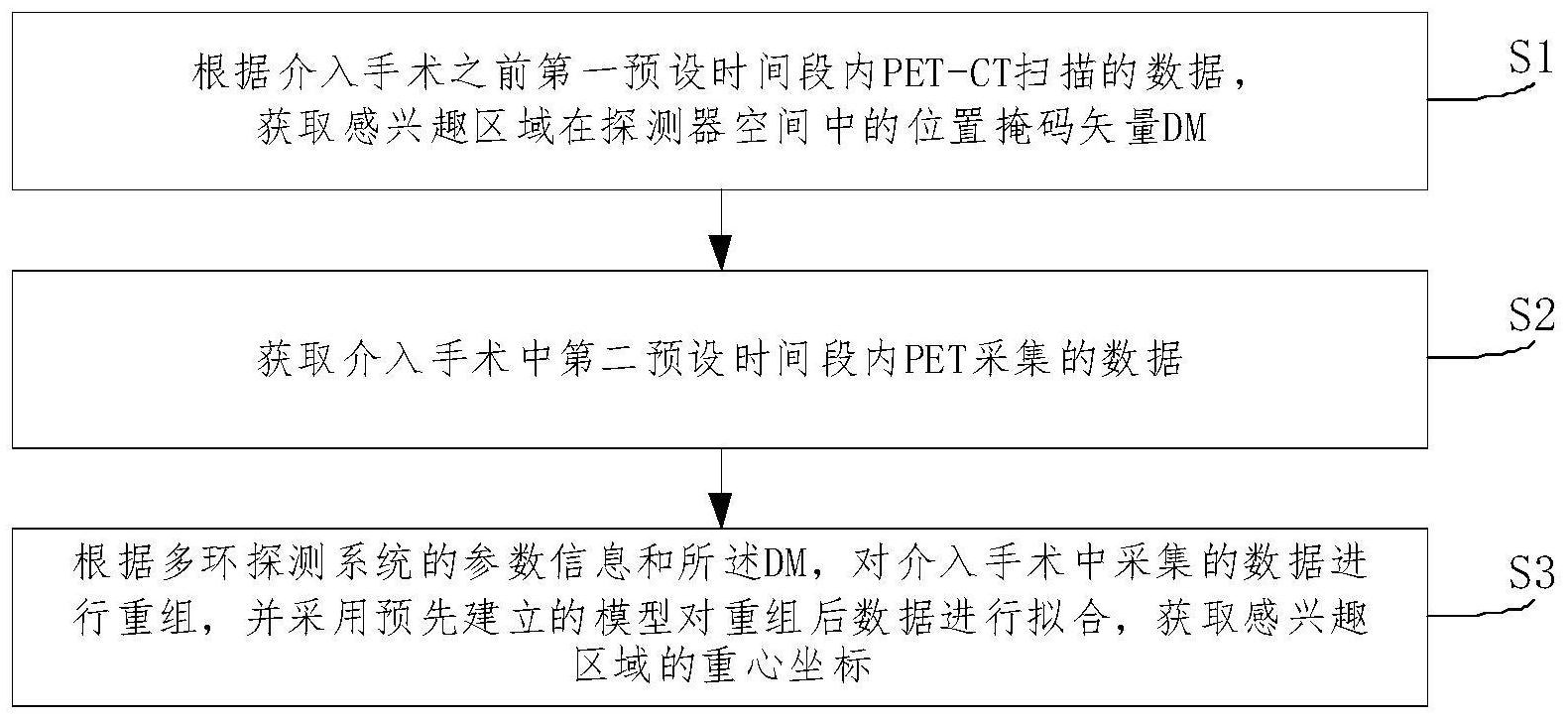
本发明公开一种基于PET数据的感兴趣区域实时定位的方法和系统,方法包括:步骤S1、根据介入手术之前第一预设时间段内PET‑CT扫描的数据,获取感兴趣区域在探测器空间中的位置掩码矢量DM;步骤S2、获取介入手术中第二预设时间段内PET采集的数据;步骤S3、根据多环探测系 全部
背景技术:
正电子发射断层显像PET(Positron Emission Tomography)是一种高端核医学影 像诊断设备。在实际操作中利用放射性核素(如18F、11C等)对代谢物质进行标记并将核素注 入人体,然后通过PET系统对患者进行功能代谢显像,反映生命代谢活动的情况。PET扫描通 常会配套其他模态扫描(比如CT、MRI等)以得到患者的解剖结构成像。两种图像最终将进行 同机融合,兼容功能成像和解剖成像的优点,达到早期发现病灶和诊断疾病的目的,在恶性 肿瘤规范化放射治疗过程中对肿瘤的准确分期,精确勾画靶区,优化放射治疗计划,评估放 疗疗效等方面具有十分重要的价值。 由于可以提供准确的三维肿瘤分子成像,PET在介入治疗时的肿瘤定位方面具有 的先天优势。以PET/CT为例,在肿瘤介入放疗时,穿透皮肤的活检针或消融装置通常仅在CT 图像上可见,而靶点可能仅在PET图像上可见。在这种情况下,CT或其他解剖结构成像方法 无法很好地显示肿瘤的实际边界,而PET功能成像可以确定代谢活跃的病灶区域,区分良性 和恶性肿瘤、存活和非存活肿瘤,或从生物学上区分恶性肿瘤的非恶性区域,从而为消融靶 区勾画提供合理准确的依据,进一步降低放疗副作用。同时PET成像也可以利用与细胞增 殖、死亡、厌氧等相关的各种分子标记物放射性药物,指向靶向肿瘤或肿瘤的特定区域,提 供准确的穿刺或组织活检部位,协助临床医生制定最佳治疗方案,指导临床介入治疗。 在介入放射学手术中使用PET扫描,呼吸运动对肿瘤位置的影响不可忽略。PET扫 描速度较慢,每个床位通常会花费几分钟时间,因此不可能在病人屏气状态下完成数据采 集,导致PET图像存在呼吸运动伪影,这些伪影包括病变大小、形状或空间位置的扭曲,以及 FDG标准化摄取值(SUV)测量值的降低。相反,配套模态扫描通常可以在很短时间内完成。以 CT扫描为例,获得的CT图像几乎是某时刻的快照。因此PET/CT扫描生成的PET图像和CT图 像,容易出现图像配准错误(特别在呼吸运动幅度最大的膈膜附近),可能会降低肝脏肿瘤 定位的准确率,甚至导致活检针或消融设备没有穿刺在肿瘤上。 为了减小配准误差,传统的方法是对患者进行呼吸训练,并在相同的呼吸周期相 位内进行多次采集,这可以有效降低呼吸伪影和PET/CT匹配误差。然而在实际操作中,病人 即使经过训练,呼吸节奏变化仍然会不可避免地带来的误差。另外,连续呼吸周期内的PET 采集可能延长手术时间和患者镇静或麻醉的时间。更重要的是,这种方法对于热消融(射频 和微波)的实时肿瘤定位帮助有限。
技术实现要素:
针对现有技术中的问题,本发明提供一种基于PET数据的感兴趣区域实时定位的 方法和系统,消除了呼吸运动的伪影,减少了人工操作风险。 4 CN 111544023 A 说 明 书 2/8 页 为了达到上述的目的,本发明采用的主要技术方案包括: 第一方面,本发明提供一种基于PET数据的感兴趣区域实时定位的方法,包括: 步骤S1、根据介入手术之前第一预设时间段内PET-CT扫描的数据,获取感兴趣区 域在探测器空间中的位置掩码矢量DM; 步骤S2、获取介入手术中第二预设时间段内PET采集的数据; 步骤S3、根据多环探测系统的参数信息和所述DM,对所述介入手术中采集的数据 进行重组,并采用预先建立的模型对重组后数据进行处理,获取感兴趣区域的位置信息即 重心坐标。 可选地,在步骤S2之后,步骤S3之前,所述方法还包括: 步骤S3a、对所述步骤S2中的介入手术中采集的数据进行校正,获取校正后的数 据; 相应地,步骤S3包括:根据多环探测系统的参数信息和所述DM,对所述校正后的数 据进行重组,并采用预先建立的模型对重组后数据进行处理如拟合,获取感兴趣区域的位 置信息即重心坐标。 可选地,所述步骤S1包括: 获取介入手术之前的PET活度分布图像; 接收用户输入的PET获取分布图像中的感兴趣区域; 基于所述感兴趣的区域,获取掩码矢量IM,以及 依据所述PET系统对应的系统矩阵A=[Aij]和所述掩码矢量IM,获取感兴趣区域在 探测器空间中的估计矢量IMP=A·IM; 对所述估计矢量IMP进行二值化处理,获得感兴趣区域在探测器空间中标定的掩 码矢量DM; 其中, IM=[IM1,IM2,…,IM TM] ,M表示为PET图像空 间的维度, DM=[DM1,DM2,…,DM ]TN ,位置掩码为0表示对应的探测 器区域与感兴趣的区域无关,无法探测到肿瘤信息,N表示为PET探测器空间的维度。 可选地,所述步骤S2中PET采集的数据为随时间变化的数据。 可选地,所述步骤S3a包括: 采用下述公式对介入手术中采集的数据进行校正,获取校正后的三维数据; St=(promptt-randomt)·normt·AC·DM,t=0,1,… 其中,prompt为探测到PET的数据,random为随机信号,norm和AC分别为归一化校 正参数和衰减校正参数,S为校正后的三维数据,t表示按时间的分帧索引,所述PET采集的 数据中存储有时间戳信息,所述时间戳信息对应分帧索引。 可选地,所述步骤S3包括: 在校正后的三维数据包括交叉环的投影信息时,对时间帧t的三维数据St进行重 组,基于SSRB算法、MSRB算法、FORE算法或TOF-FORE相关算法以二维正弦图St(θ,r,z)的形 5 CN 111544023 A 说 明 书 3/8 页 式进行重组,并存储, 其中,行θ和列r分别表示多环探测系统的横截面方向角度和径向的取样,页坐标z 代表探测系统中环位置,z对应轴向坐标。 可选地,所述步骤S3包括: 在多环探测系统的环形探测器中,给定点源位置坐标为(x0,y0),则入射方向角为 θ的响应线LOR被定义为:y-y0=ctgθ·(x-x0) 则响应线LOR到探测器中心(0,0)的距离r为: (θ,r)为正弦图中的行列坐标; 根据最小二乘法,获取点源在探测器横截面方向的位置估计求解为: 其中: 由于 是实对称2x2矩阵,T表示转置; 对于给定感兴趣区域的投影方向θ,测量数据沿径向r的分布,测量计数分布的重 心来得到r的坐标,得到对应系数矩阵Cp和bp,然后再得到感兴趣区域横截面的重心位置估 计(xp,yp),如下: 轴向坐标 故,得到时间帧t对应的感兴趣区域的实时位置坐标(xp,yp,zp)。 可选地,感兴趣区域为介入手术中的肿瘤区域; 和/或,所述步骤S1中的所述PET-CT扫描的数据替换为PET-MR扫描的数据。 第二方面,本发明实施例还提供一种多环探测系统,包括用于执行扫描的多环探 测器和与多环探测器电连接的计算设备,所述计算设备包括存储器和处理器,所述存储器 中存储指令,所述处理器执行所述存储器中存储的指令,并执行上述第一方面任一所述的 方法。 本发明的有益效果是: 本发明的方法利用短时PET成像勾画出感兴趣区域,然后在探测器正弦图空间对 感兴趣区域运动轨迹进行拟合,实时计算出勾画区域的三维空间坐标。利用本发明的方法, 可以实时捕捉受运动影响的感兴趣区域位置,一方面可以为门控成像提供实时运动信号, 减少采集时间和麻醉时间,也不需要病人进行复杂的呼吸训练,另一方面可以为肿瘤消融 6 CN 111544023 A 说 明 书 4/8 页 穿刺提供实时准确的病灶位置,保证穿刺成功,有助于简化介入治疗流程。 相比于传统的方法,受呼吸运动影响的感兴趣位置如肿瘤位置可以被实时确定, 消除了呼吸运动的影响,为PET介入治疗提供了辅助信息如准确的肿瘤重心位置坐标;减少 繁琐的病人呼吸训练和操作,有助于缩短手术时间和减少患者麻醉或镇静时间以及相应剂 量的麻醉药物,也有助于减少PET操作中人员的辐射暴露。 附图说明 图1为本发明一实施例提供的基于PET数据的感兴趣区域实时定位的方法的流程 示意图; 图2为本发明的横截面拟合模型的示意图; 图3为仿真图像中勾划肿瘤的示意图; 图4为对应的肿瘤模拟三维运动真实坐标和计算坐标的比较示意图; 图5为多环探测系统中横截面方向结构示意图。











