
技术摘要:
本发明提供一种手术机器人的控制系统及手术机器人,用以解决现有的手术机器人控制不准确、精度低的技术问题。该应用于手术机器人中的手术器械控制装置包括:控制单元,与上位控制机通信连接;至少一组检测驱动单元,其中的任一检测驱动单元包括:电机驱动子单元、编码 全部
背景技术:
目前,由手术机器人辅助的微创外科手术逐步应用到实际的临床中,现有的手术 机器人主要由控制台和操作臂组成,控制台由计算机系统、操作手柄和输入输出设备等组 成。手术机器人进行手术时,医生可坐在远离手术台的控制台前控制操作杆,操作杆检测医 生的控制操作,经过计算机系统的计算分析,将医生对操作杆的控制操作传达到机械臂上 的手术器械,完成手术操作。 然而,现有技术中的手术机器人只能简单地执行操作,无法及时准确地获知手术 器械执行手术操作时的实时变化,并且,现有技术中的手术机器人在硬件设计上不够完善, 有待优化。这些问题导致现有技术中的手术机器人控制不够准确、精度低,不便于手术的顺 利开展。
技术实现要素:
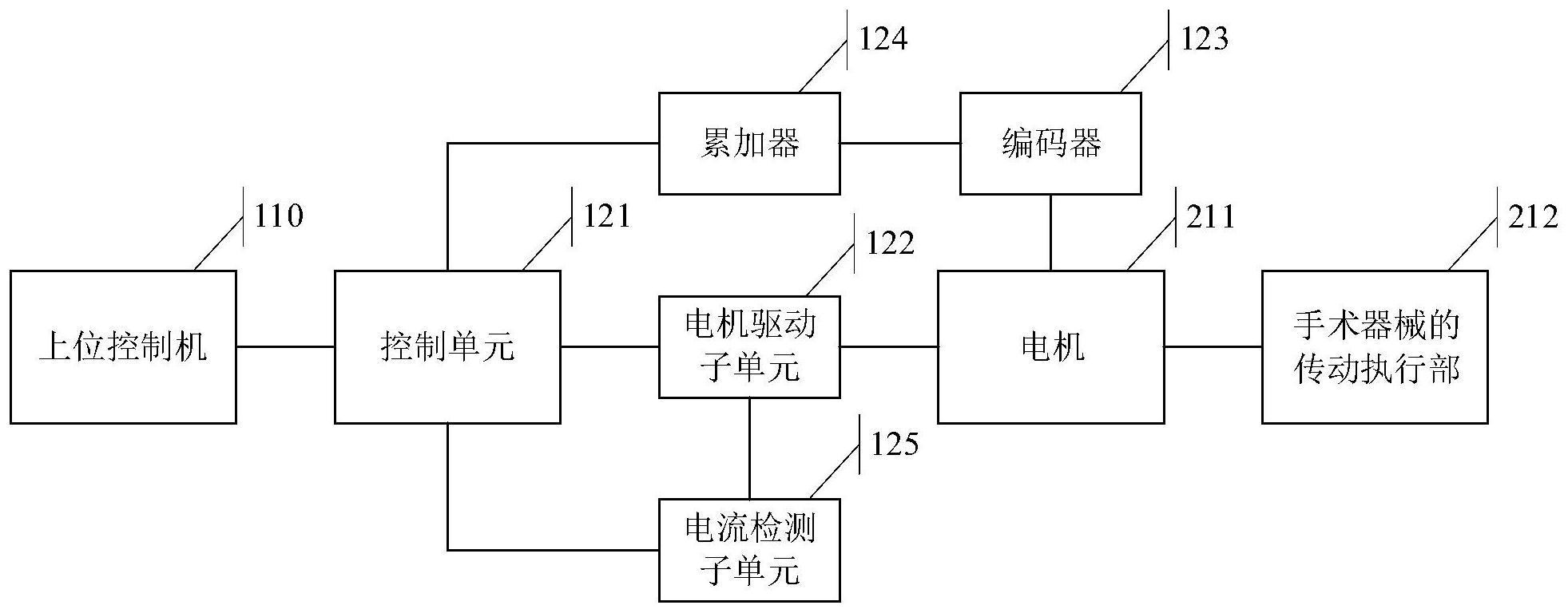
本发明实施例提供一种手术机器人的控制系统及手术机器人,用以解决现有技术 中的手术机器人控制不够准确、精度低的技术问题。 第一方面,提供一种应用于手术机器人中的手术器械控制装置,所述手术器械控 制装置包括: 控制单元,与上位控制机通信连接; 至少一组检测驱动单元,所述至少一组检测驱动单元中的任一检测驱动单元包 括:电机驱动子单元、编码器和累加器;其中, 所述电机驱动子单元,与所述控制单元连接,受所述控制单元控制;以及与电机通 过电路连接,通过控制用于驱动所述电机的电流控制所述电机的转动,以控制手术器械的 传动执行部,所述手术器械的传动执行部与所述电机连接并由所述电机驱动; 所述编码器,与所述电机连接,用于检测所述电机的实际转动参数; 所述累加器,与所述控制单元、所述编码器分别连接,用于统计所述实际转动参 数,并由所述控制单元读取统计的所述实际转动参数。 在一种可能的实现方式中,所述任一检测驱动单元还包括: 电流检测子单元,与所述控制单元、所述电机驱动子单元分别连接,用于检测所述 电流以获得电机电流值,并由所述控制单元读取所述电机电流值。 在一种可能的实现方式中,所述电流检测子单元包括仪表放大芯片,用于检测所 述电流并将检测到的电流值进行正比例放大,以获得所述电机电流值。 第二方面,提供一种手术机器人的控制系统,所述手术机器人包括机械臂,及安装 在所述机械上的手术器械,所述控制系统包括上位控制机、机械臂控制装置和手术器械控 4 CN 111714207 A 说 明 书 2/9 页 制装置,其中: 所述上位控制机,与所述机械臂控制装置、所述手术器械控制装置分别连接,用于 根据获得的用于控制手术机器人执行操作的控制信息,生成并向所述机械臂控制装置下发 机械臂运动控制数据,及生成并向所述手术器械控制装置下发手术器械运动控制数据;并 根据从所述机械臂控制装置、所述手术器械控制装置获得的反馈数据,确定所述机械臂、所 述手术器械的运动状态。 所述机械臂控制装置,用于以所述机械臂运动控制数据控制所述机械臂运动,并 检测获得用于表示所述机械臂运动状态的机械臂运动数据; 所述手术器械控制装置,用于以所述手术器械运动控制数据控制所述手术器械运 动,并检测获得用于表示所述手术器械运动状态的手术器械运动数据。 在一种可能的实现方式中,所述手术器械包括至少一个电机,所述手术器械运动 控制数据包括所述至少一个电机中各电机的指定转动参数;所述反馈数据包括所述各电机 的实际转动参数,及用于驱动所述各电机的各电流的电机电流值。 在一种可能的实现方式中,所述控制系统还包括至少一个控制开关,所述至少一 个控制开关中的任一控制开关:通过自身对应的机械臂IO端口连接到所述机械臂控制装 置,对应一机械臂工作状态,在检测到开启操作时生成并向所述机械臂控制装置反馈开启 信号; 所述机械臂控制装置还用于:调整所述机械臂的工作状态为获得的开启信号所属 的控制开关所对应的机械臂工作状态。 在一种可能的实现方式中,所述控制系统还包括与所述至少一个控制开关连接的 防呆开关,用于控制所述至少一个控制开关所在电路的通断。 在一种可能的实现方式中,所述任一控制开关:还通过自身对应的手术器械控制 装置IO端口连接到所述手术器械控制装置,在检测到开启操作时生成并向所述手术器械控 制装置反馈开启信号; 所述控制系统还包括与所述手术器械控制装置连接的至少一个指示灯,所述手术 器械控制装置还用于:控制所述至少一个指示灯以与获得的开启信号所属的控制开关所对 应的显示状态进行显示。 在一种可能的实现方式中,所述手术器械控制装置为第一方面中所述的手术器械 控制装置。 第三方面,提供一种手术机器人,所述手术机器人包括如第二方面所述的控制系 统。 本发明实施例中,手术器械控制装置包括控制单元和至少一组检测驱动单元。其 中,控制单元与上位控制机通信连接,因而,手术器械控制装置可以获得上位控制机的控制 数据,以实现对手术器械精确的控制,并且,手术器械控制装置可以向上位控制机反馈检测 到的实时参数,以使得上位控制机知晓手术器械实时的状态。通过获得控制数据和反馈实 时参数,形成闭环控制,提高了手术机器人控制手术器械的准确度。 进一步地,至少一组检测驱动单元中的任一检测驱动单元均包括电机驱动子单 元、编码器和累加器,因而,手术器械控制装置可以对控制手术器械的每个电机进行单独的 控制和检测,提高了控制的精确度和检测结果的准确性。 5 CN 111714207 A 说 明 书 3/9 页 进一步地,任一检测驱动单元还包括电流检测子单元,通过电流检测子单元可以 检测获得驱动电机的电流的电流值(即电机电流值),以使得上位控制机在获得电机电流值 后可以确定电机实时的转矩。 进一步地,电流检测子单元包括仪表放大芯片,该仪表放大芯片可以检测驱动电 机的电流并将检测到的电流值进行正比例放大,以获得电机电流值。通过对直接检测到的 电流值的放大,可以提高电机电流值的精度,以使得上位控制机在获得电机电流值后可以 获得电机更加准确的实时转矩。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提 供的附图获得其他的附图。 图1为本发明实施例中一种手术器械控制装置的连接关系示意图; 图2为本发明实施例中一种控制系统的连接关系示意图。











