
技术摘要:
本发明公开了一种基于通信传感异步数据融合的协作邻居车辆定位方法,包括:(1)车辆利用通信和传感等技术获得邻居车辆的多源异步状态测量信息;(2)车辆根据粒子滤波方法实现多源异步数据融合,提高对邻居车辆的定位精度。本发明考虑具备通信能力的车辆在道路上行驶时对 全部
背景技术:
在智能交通领域,对邻居车辆的定位误差会造成车辆的控制误差和安全隐患,对 于车辆安全和协作驾驶的高效性有着关键的影响作用。传统的邻居车辆定位方法主要利用 雷达、摄像头等传感器进行测量,但传感器测量范围有限、受视距和天气影响严重等缺点使 得利用传感器对邻居车辆定位的方法不稳定且误差较大。车联网技术的发展使得车辆之间 能够交换状态信息,促进了协作式车辆定位技术的发展,然而通信也会有丢包、时延等问 题,而且通信传输的车辆自身的位置、速度等状态的测量信息也可能存在一定的误差;因 此,提高邻居车辆的定位精度仍是一个待解决的问题。 在车辆定位领域,公开号为US2019346860的美国专利提出了一种车辆自动定位方 法,车辆通过至少两个5G传输点发出的毫米波信号来计算与两个传输点的相对方位和自身 速度,然后对自身车辆进行定位。公开号为CN110657812的中国专利提出了一种车辆定位方 法和装置,该方法利用摄像头采集的图像提取道路特征,与导航地图进行匹配,从而确定自 身车辆的信息。M.Brambilla等人在文献《Precise vehicle positioning by cooperative feature association and tracking in vehicular networks,IEEE Statistical Signal Processing Workshop,2018》中提出了分布式的贝叶斯数据关联和定位方法,车辆 通过V2V(Vehicle-to-Vehicle)通信和邻居车辆协作,先对一系列被动特征目标(路边行人 等)进行定位,进而提高对自身的定位精度,但是上述现有技术都是对自身车辆进行定位, 没有考虑对邻居车辆进行定位。S.Nam等人在文献《CNVPS:Cooperative neighboring vehicle positioning system based on vehicle-to-vehicle communication,IEEE Access,January 2019》中提出了一种协作式邻居车辆定位系统,在该系统中每辆车会测量 其邻居车辆的定位信息,然后通过V2V通信分享给所有邻居车辆,车辆在获得邻居车辆的多 个定位测量信息后,利用最大似然估计对邻居车辆进行定位,提高定位精度,但是该方法没 有考虑不同车辆之间传感测量时间异步带来的问题。
技术实现要素:
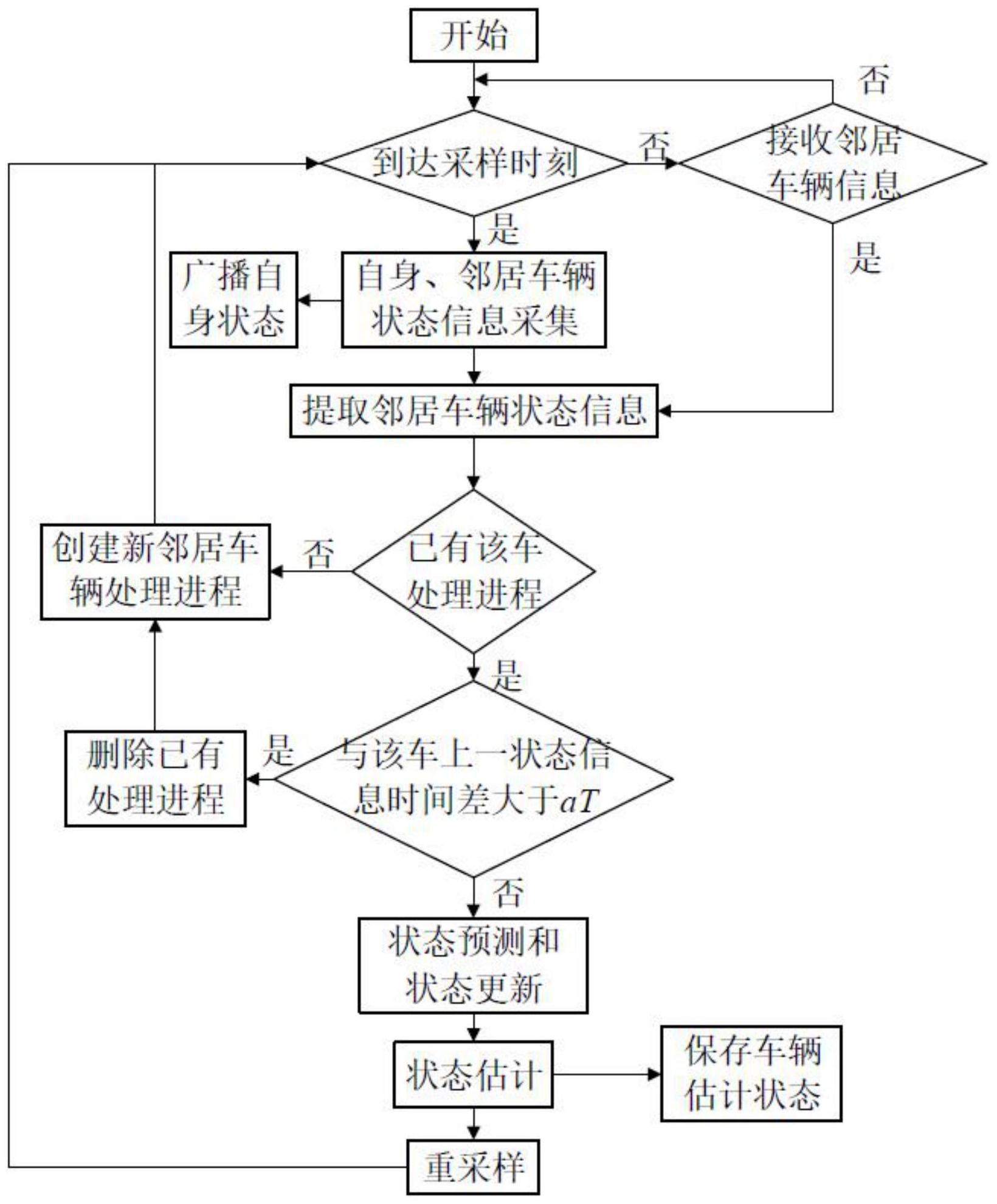
鉴于上述,本发明提出了一种基于通信传感异步数据融合的协作邻居车辆定位方 法,能够明显提升邻居车辆的定位精度。 一种基于通信传感异步数据融合的协作邻居车辆定位方法,包括如下步骤: (1)周期性地测量自身及邻居车辆包括位置、速度在内的运动状态信息,将自身状 态信息通过V2V广播给所有邻居车辆,同时接收邻居车辆通信广播的状态测量信息; (2)从获得的邻居车辆信息中提取车辆ID、信息采集时间以及位置和速度,并根据 邻居车辆ID和信息采集时间来判断是否需要为该邻居车辆新建滤波进程; 5 CN 111586632 A 说 明 书 2/9 页 (3)采用通信传感异步数据融合算法对邻居车辆进行定位估计,即根据滤波进程 中上一时刻粒子状态预测当前时刻粒子状态,然后利用获得的邻居车辆状态测量信息进行 粒子权重更新,最后完成邻居车辆运动状态估计并对粒子进行重采样。 进一步地,所述步骤(1)中将自身车辆记做i,其任一邻居车辆记做j,则车辆i和j 在t时刻的运动状态表达如下: 其中:Si(t)和Sj(t)分别为车辆i和j在t时刻的运动状态, 和 分别为车 辆i和j在t时刻的横向位置, 和 分别为车辆i和j在t时刻的纵向位置,vi(t)和vj (t)分别为车辆i和j在t时刻的速度,θi(t)和θj(t)分别为车辆i和j在t时刻行驶方向与正东 方向的夹角,T表示转置,t为非负实数。 进一步地,所述步骤(1)中自身车辆i获得邻居车辆j的第k个状态测量信息表示为 k为自然数,r k∈{s ,g},当rk=s则表示该信息由车辆i的传感器测量得到且 Sj ,k=Sj(tk),Sj(tk)为车辆j对应tk时刻的运动状态, 为车辆i自身 的状态测量误差, 为车辆i对车辆j的传感测量误差;当rk=g则表示该信息由车辆i通信 接收获得且 为车辆j自身的状态测量误差。 进一步地,所述步骤(2)中对于tk时刻获得邻居车辆j的第k个状态测量信息 根据邻居车辆j的ID判断是否为新的邻居车辆,若是则为该邻居车辆新建一个滤波进程,若 否则说明自身车辆i中已有该邻居车辆的滤波进程,进而根据获得的其上一状态测量信息 采集时间tk-1来判断 的时效性:若tk-tk-1>aT,则说明间隔时间较长,删除原有滤波进 程并为该邻居车辆新建一个滤波进程,否则在原有滤波进程上继续处理,T为传感器测量周 期,a为预设的时效性参数且为正整数。 进一步地,所述步骤(3)中的通信传感异步数据融合算法对于需在车辆i中新建滤 波进程的邻居车辆j即k=0情况下,当rk=s时, Sj,0满足均值为 协 方差矩阵为 的高斯分布;当rk=g时, Sj,0满足均值为 协方差 矩阵为 的高斯分布;进而在已知Sj,0的分布后,从该分布中随机采样得到每一粒子状态 每一粒子权重设为 m=1,2,...,M,M为粒子数量。 进一步地,所述协方差矩阵 的 分别设置如下: 6 CN 111586632 A 说 明 书 3/9 页 其中: 和 分别为车辆i通过GPS测量得到关于自身横向位置、 纵向位置、速度和角度的噪声方差, 和 分别为车辆j通过GPS测量得到 关于自身横向位置、纵向位置、速度和角度的噪声方差, 和 分别为车辆i 通过传感器测量得到关于车辆j横向相对位置、纵向相对位置、相对速度和相对角度的噪声 方差。 进一步地,所述步骤(3)中的通信传感异步数据融合算法对于在车辆i中已有滤波 进程的邻居车辆j即k≠0情况下,根据滤波进程中上一时刻粒子状态预测当前时刻粒子状 态的方法为:若rk-1=rk即tk-1时刻和tk时刻邻居车辆j的状态测量信息为车辆i通过同一方 式得到,满足tk-tk-1=bT且b为小于a的正整数;对于每一粒子,从噪声分布中随机采样得到 车辆j在tk-1时刻的运动速度噪声 和运动角度噪声 进而结合tk-1时刻的 每一粒子状态 和离散非线性动力模型预测得到tk-1 T时刻车辆j的运动状态Sj(tk-1 T),以此递推最终得到tk时刻的每一粒子状态 M为粒子数量; 若rk-1≠rk即tk-1时刻和tk时刻邻居车辆j的状态测量信息为车辆i通过不同方式得 到,满足tk-tk-1=bT τ,τ为车辆i和j的信息采集时间差且τ<T;对于每一粒子,根据tk-1时 刻的每一粒子状态 和离散非线性动力模型逐步预测得到tk-1 bT时刻和tk-1 (b 1)T时 刻车辆j的运动状态Sj(tk-1 bT)和Sj(tk-1 (b 1)T),则tk时刻每一粒子状态 通过以下平 滑算法得到: 其中:α=τ/T。 进一步地,所述离散非线性动力模型表达式如下: 其中: 为车辆j在t T时刻的横向位置, 为车辆j在t T时刻的纵 向位置,vj(t T)为车辆j在t T时刻的速度,θj(t T)为车辆j在t T时刻行驶方向与正东方向 的夹角, 和 分别为车辆j在t时刻的运动速度噪声和运动角度噪声。 进一步地,所述步骤(3)中的通信传感异步数据融合算法对于在车辆i中已有滤波 进程的邻居车辆j即k≠0情况下,利用获得的邻居车辆状态测量信息进行粒子权重更新的 方法为:对于每一粒子,其粒子权重通过以下公式进行更新; 7 CN 111586632 A 说 明 书 4/9 页 其中: 和 分别为t k - 1时刻和t k时刻的每一粒子权重,当r k=s时, 为 的概率密度函数在 处的值;当r k=g时, 为 的概率密度函数在 处的值。 进一步地,所述步骤(3)中的通信传感异步数据融合算法对于在车辆i中已有滤波 进程的邻居车辆j即k≠0情况下,通过以下公式计算出邻居车辆j的运动状态估计值; 其中: 为tk时刻邻居车辆j的运动状态估计值。 进一步地,所述步骤(3)中的通信传感异步数据融合算法对于在车辆i中已有滤波 进程的邻居车辆j即k≠0情况下,对粒子进行重采样的方法为:当有效粒子数Neff小于预设 的阈值Nth时进行粒子重采样且 首先将(0,1]的粒子权重取值区间 分成M个子区间,每个子区间为(λm-1,λm]且 然后随机产生M个在[0,1]上均 匀分布的值ul,l=1,2,...,M,当ul落在区间(λm-1,λm]时,则将 作为对应新的粒子状态 即 新的粒子权重 设为1/M。 基于上述技术方案,本发明具有以下有益技术效果: 1 .本发明提出的通信传感异步数据融合定位方法结合了传感器和通信方法的优 点,测量范围广,环境适应性强,同时明显提高了邻居车辆的定位精度。 2.本发明提出的粒子滤波融合方法在每次获得新的测量值时会实时进行滤波融 合,计算简单,结果有效,解决了协作邻居车辆定位中的多源异步数据融合的问题。 附图说明 图1为本发明协作邻居车辆定位方法的系统场景示意图。 图2为本发明协作邻居车辆定位方法的状态信息获取示意图。 图3为本发明协作邻居车辆定位方法的滤波融合流程示意图。 图4为本发明协作邻居车辆定位方法的车辆位置评估结果图。 图5为本发明协作邻居车辆定位方法的车辆位置评估误差结果图。 图6为本发明协作邻居车辆定位方法的车辆位置评估均方误差受GPS和传感器噪 声方差的影响结果图。











