
技术摘要:
本发明公开了一种用于骨骼康复的机器人结构,包括基座、固定板、后臂连杆、前臂连杆,所述的基座上安装有导轨支架和驱动器,所述的导轨支架上滑动连接有第一滑块,所述的驱动器连接第一滑块,所述的基座与固定板之间连接有第一摇杆,所述的固定板外侧安装有第一电机, 全部
背景技术:
手臂是人体最重要运动肢体之一,与人们日常活动密切相关,但也是最容易受到 伤害的肢体,随着经济的高速发展,交通工具的数量也迅速增长,因交通事故意外造成上肢 损伤的人数也在不断增长,同时,我国正在迅速步入老年化社会,在这群老龄人群中有大量 的人存在不同程度的上肢退化功能,而且随着人民生活水平的提高,由心血管疾病引起的 上肢偏瘫的人数也越来越多,且在年龄上呈现年轻化的趋势,这些问题都很大程度上影响 着他们的生活质量。临床康复医学理论指出,除了早期的手术治疗和必要的药物治疗外,正 确科学的运用一定物理疗法来辅助药物治疗,对患者上肢运动功能的康复和巩固起到不可 替代的作用,但是肢体受损患者几乎都存在或多或少的运动障碍,进行康复训练时患者无 法一个人在家里进行自行康复,需借助别人的帮助才能顺利进行,而且,康复训练时缺乏专 业康复治疗师的指导,导致康复训练方式不够准确乙基训练强度无法掌控,使患者错过了 最有利康复治疗时间从而得不到理想的康复效果,更有患者甚至丧失了上肢的活动能力。
技术实现要素:
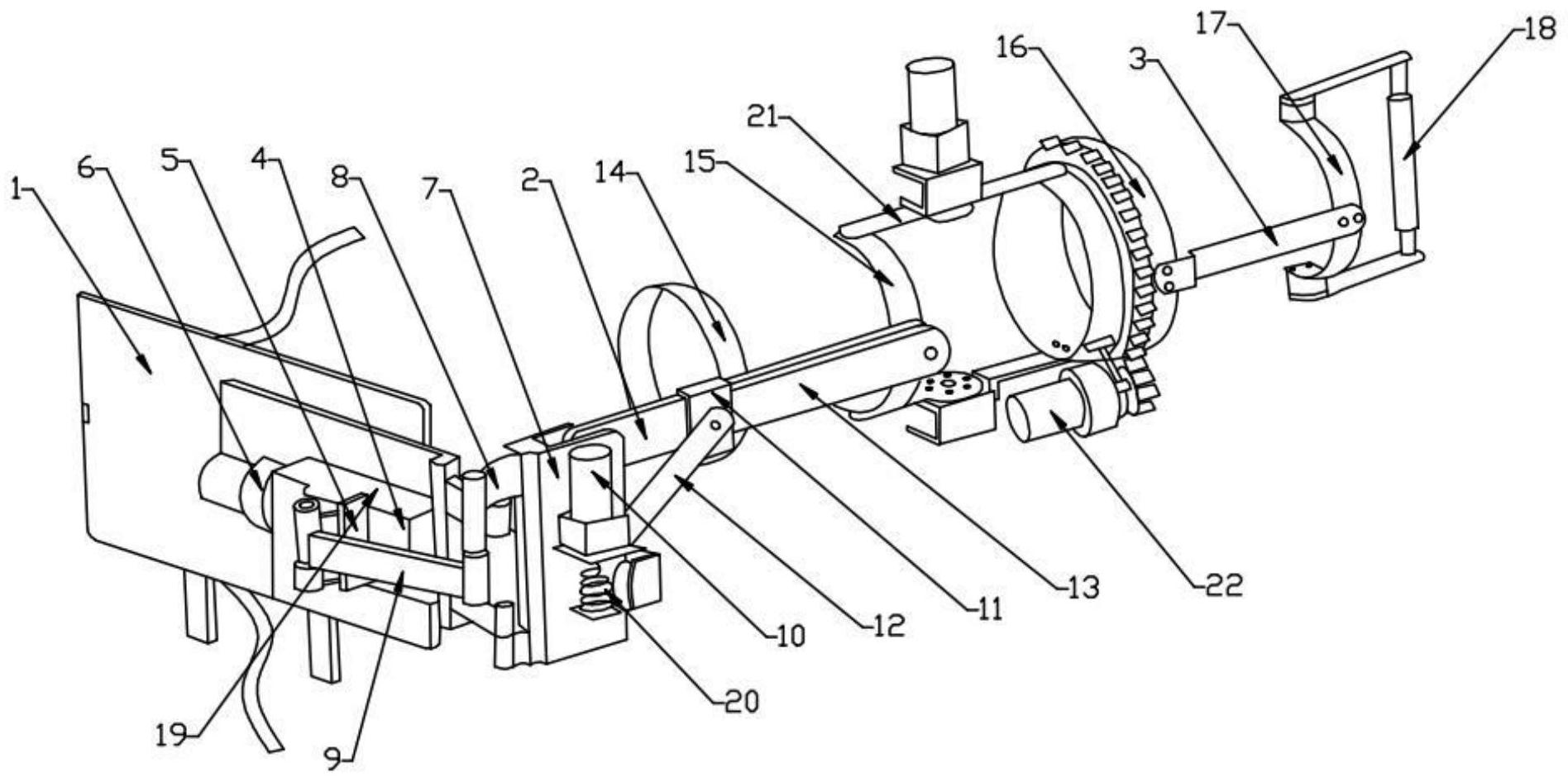
本发明的目的是克服以上的技术缺陷,提供一种用于骨骼康复的机器人结构,能 有效对患肢前后臂各部位进行支撑和牵引,使用安全舒适,利于康复治疗。 为解决上述技术问题,本发明提供的技术方案为:一种用于骨骼康复的机器人结 构,包括基座、固定板、后臂连杆、前臂连杆,所述的基座上安装有导轨支架,所述的导轨支 架上滑动连接有第一滑块,所述的基座上安装有驱动器,所述的驱动器连接第一滑块,所述 的基座与固定板之间连接有第一摇杆,所述的第一滑块外侧与第一摇杆之间铰接连接有第 一连杆,所述的固定板外侧安装有第一电机,所述的后臂连杆连接在固定板内,所述的后臂 连杆外侧设有滑槽,所述的滑槽上滑动连接有第二滑块,所述的第一电机与第二滑块之间 连接第二连杆,所述的后臂连杆上连接有连接第二滑块的第二摇杆,所述的后臂连杆内侧 连接有后臂环,所述的后臂连杆与前臂连杆之间通过肘关节结构连接,所述的肘关节结构 包括连接后臂连杆的肘关节环和连接前臂连杆的齿轮环,所述的前臂连杆前端连接腕关节 环,所述的腕关节环上下两端转动连接有手柄。 进一步的,所述的基座上设有用于连接导轨支架的梯形槽。 进一步的,所述的驱动器为电动缸,所述的电动缸包括电机和滚珠丝杠,所述的电 机通过联轴器连接滚珠丝杠。 进一步的,所述的第一电机与第二连杆通过蜗轮蜗杆连接。 进一步的,所述的肘关节环和齿轮环上下端之间连接有第三连杆,所述的齿轮环 上安装有第二电机,所述的第二电机端部设有啮合连接齿轮环外侧齿轮的小齿轮。 本发明与现有技术相比的优点在于:本发明通过在肩关节和肘关节处分别设置通 3 CN 111603357 A 说 明 书 2/2 页 过驱动器或电机驱动的滑块和摇杆,可以实现肩关节和肘关节的屈伸旋转运动,在肘关节 处设置通过电机驱动的齿轮,可以旋转从而带动前臂进行转动的康复训练,有效对患肢前 后臂各部位进行支撑和牵引,使用安全舒适,利于康复治疗。 附图说明 图1是本发明的结构示意图。 如图所示:1、基座,2、后臂连杆,3、前臂连杆,4、导轨支架,5、第一滑块,6、驱动器, 7、固定板,8、第一摇杆,9、第一连杆,10、第一电机,11、第二滑块,12、第二连杆,13、第二摇 杆,14、后臂环,15、肘关节环,16、齿轮环,17、腕关节环,18、手柄,19、梯形槽,20、蜗轮蜗杆, 21、第三连杆,22、第二电机。











