
技术摘要:
本发明涉及石油钻井技术领域,尤其涉及一种旋转导向智能指令下传系统及方法,包括带有解码器、FPGA芯片和编码器的智能指令计算器,以及通过用于存储旋转导向钻井数据的数据存储器与所述智能指令计算器数据相连的MWD随钻测量单元;所述解码器接收输入的目标导向数据进行 全部
背景技术:
从20世纪80年代后期,在国际上开始研究旋转导向钻井技术,到90年代初期多家 公司形成了商业化技术并终实现了信息化和自动化钻井,旋转导向钻井技术作为目前发展 的前沿钻井技术之一,代表着世界钻井技术发展的高水平。 旋转导向钻井技术可以自动、灵活地调整井斜和方位,大大提高钻井速度和钻井 安全性,精确控制井眼轨迹,完全适合目前开发特殊油藏的超深井、高难定向井、水平井、大 位移井、智能井等特殊工艺井导向钻井的需要,极大的降低了石油勘探、钻井的成本。 而目前下传指令的方式主要有以下两种方法: 1、以改变顶驱转速为基础的方法; 如现有技术中公开号为CN109779601A,公开时间为2019年5月21日,名称为“一种旋转 导向钻井系统的下传指令自适应解码方法”的中国发明专利文献,公开了一种旋转导向钻 井系统的下传指令自适应解码方法,包括指令转换系统将下传指令转换为泥浆发电机的转 速信号;采集所述泥浆发电机的转速信号,并对转速信号进行滤波处理;判断相关度与预设 相关度之间的大小关系,获取一定时间范围内的下传指令中唤醒序列的梯度值,并根据下 传指令中唤醒序列的梯度值,自动调整后续下传指令中数据序列梯度值的阈值h1和h2;判 定的下传指令中数据序列的脉冲序列沿;并根据判定结果确定数据序列的脉冲宽度,根据 脉冲宽度确定下传信号。 2、以改变泥浆排量为基础的方法; 如现有技术中公开号为公开号为CN102022082A,公开时间为2011年4月20日,名称为 “一种控制旋转导向钻井工具的地面指令下传方法及装置”的中国发明专利文献,其技术方 案包括以下步骤:(1)地面控制系统发送地面控制指令;(2)泥浆泵泵送泥浆;(3)指令转换 单元将该指令转换为时间流量变化参数后,发送到泥浆流量控制阀;(4)泥浆流量控制阀分 流步骤(2)中泥浆泵泵送的泥浆;(5)旋转导向钻井工具中指令解析单元解析地面控制指 令;(6)旋转导向钻井工具中控制单元控制旋转导向钻井工具动作。 但是现有技术的这些方案虽然实现了旋转导向指令下传,但需手动输入指令序号 和奇偶校验位,操作繁琐、灵活性差,并且该系统仅通过流量调节阀调节泥浆出入口流量, 尚未考虑泥浆泵和管汇憋压对设备的影响,对钻井安全存在一定威胁。
技术实现要素:
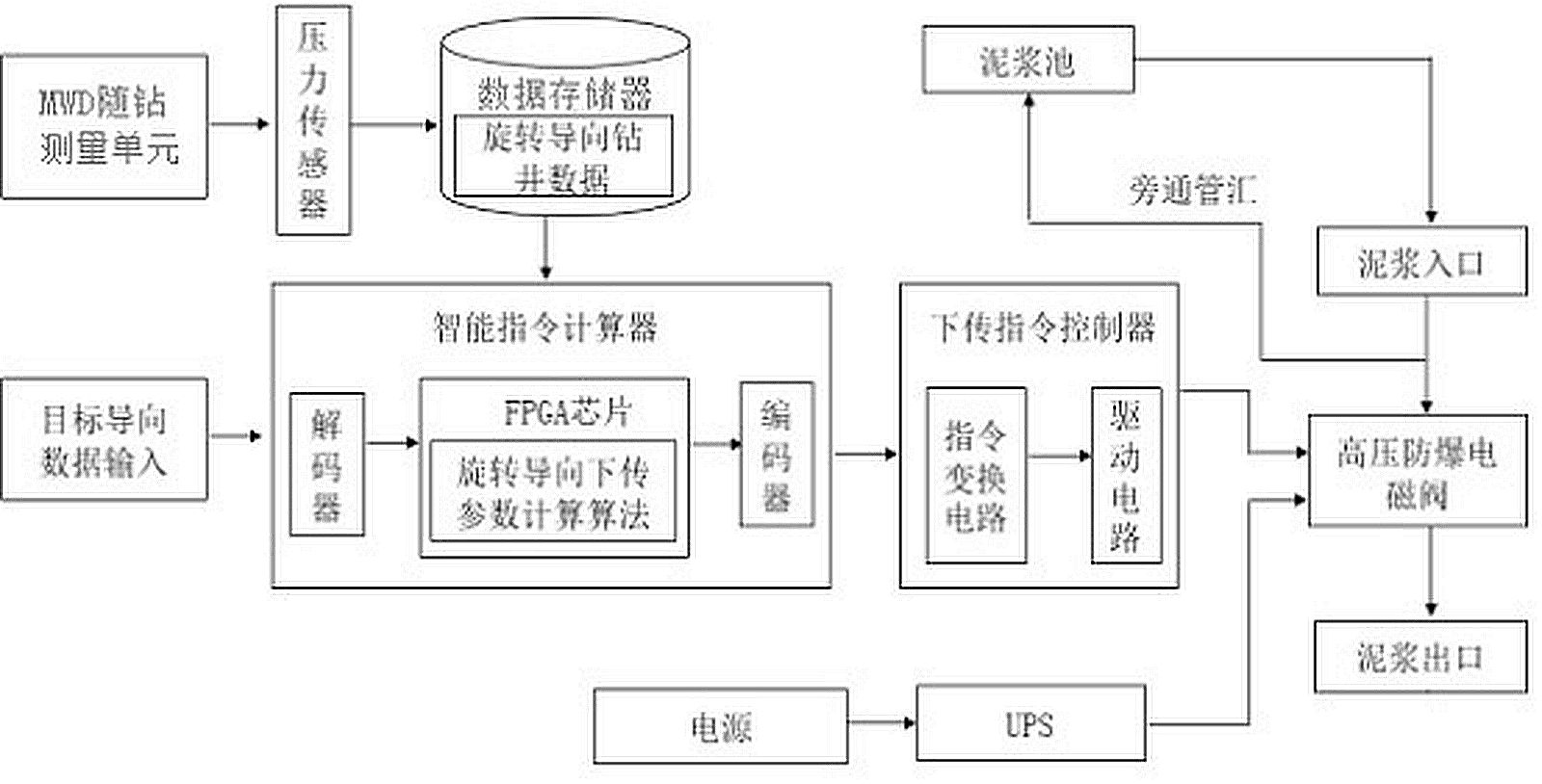
为了克服上述现有技术中存在的问题和不足,本发明旨在于提供一种通过输入旋 转导向钻井的目标导向数据、采集存储MWD数据,配备智能指令计算器实时接收、处理MWD上 传数据和输入数据,配备下传指令控制器进行控制信号转换和驱动信号放大,配备高压防 4 CN 111608580 A 说 明 书 2/5 页 爆电磁阀进行控制信号接收与流量控制,实现泄流泥浆排量调整,形成特定旋转导向钻井 下传编码指令,从而实现旋转导向智能指令下传的旋转导向系统及方法。 本发明的一种旋转导向智能指令下传系统,其特征在于:包括带有解码器、FPGA芯 片和编码器的智能指令计算器,以及通过用于存储旋转导向钻井数据的数据存储器与所述 智能指令计算器数据相连的MWD随钻测量单元;所述解码器接收输入的目标导向数据进行 解码,并将解码结果传输至FPGA芯片,所述FPGA芯片将解码结果汇同所述MWD随钻测量单元 的数据进行指令计算,并将指令计算结果通过编码器制作成指令输出至包括指令变化电路 和驱动电路的指令下达控制器,所述指令下达控制器将指令转化为对高压防爆电磁阀的驱 动控制信号,通过高压防爆电磁阀接收控制信号并进行流量控制,智能改变入井排量,形成 特定下传编码指令。 所述智能指令计算器和数据存储器均设置在地面控制中心里;所述MWD随钻测量 单元设置在井下,并与所述数据存储器有线或者无线数据通讯相连。 所述MWD随钻测量单元通过设置于地面的压力传感器连入所述数据存储器,所述 MWD随钻测量单元通过泥浆正脉冲信号触发所述压力传感器读取并向所述数据存储器输入 MWD随钻测量单元的检测数据,即通过压力传感器实时采集MWD正泥浆脉冲信号,将泥浆脉 冲数据传输至本地数据中。 所述数据存储器中还包括用于将输入数据与存储的历史数据进行比对判断的数 据比对单元,所述数据存储器与所述智能指令计算器之间数据互通,即所述FPGA芯片将所 述解码器的解码结果、以及所述指令计算结果传输至所述数据存储器中作为旋转导向钻井 数据。 所述指令下达控制器中的指令变化电路将所述指令计算结果转化为对所述驱动 电路的驱动信号,所述驱动电路接根据所述驱动信号导通或关断,下传指令控制器接收智 能指令计算器中的编码数据,通过指令转换电路将编码数据转换为电动阀的控制信号,再 将控制信号输入至驱动电路,驱动电路将控制信号进行驱动放大。 所述高压防爆电磁阀连接有带有UPS备用电源的供电电路,且所述供电电路由所 述驱动电路控制,高压防爆电磁阀通过UPS接通电源,并接收下传指令控制器中驱动电路的 输出信号实时调整电磁阀开度,旁通管汇将部分泥浆循环至泥浆池,从而智能改变入井排 量,通过负泥浆脉冲器形成负泥浆脉冲信号,实现旋转导向钻井智能指令下传功能。 所述MWD随钻测量单元向所述数据存储器输入包括井斜角、方位角、工具面角在内 的随钻测量井眼轨迹参数,以及包括温度在内的辅助参数。 本发明还公开了一种旋转导向智能指令下传方法,对应上述系统,其特征在于,包 括以下步骤: 目标导向数据输入步骤,通过解码器向智能指令计算器中的FPGA芯片输入包括预设井 眼轨迹数据,和/或包括钻井过程中需要改变的井斜角、方位角、工具面角在内的轨迹参数; MWD检测数据上传步骤,通过MWD随钻测量单元实时采集井下包括井斜角、方位角、工具 面角在内的随钻测量的井眼轨迹参数,以及包括温度在内的辅助参数,并将采集数据,并通 过数据存储器上传至智能指令计算器中的FPGA芯片,同时,所述数据存储器保存上述数据; 智能计算步骤,所述FPGA芯片接收到所述目标导向数据输入步骤和MWD检测数据上传 步骤的数据后,通过计算差异值确定需要驱动调整的导向结果并进行编码器编码处理成为 5 CN 111608580 A 说 明 书 3/5 页 调整指令; 指令下达执行步骤,将所述智能计算步骤的调整指令通过指令变化电路转化为控制驱 动电路开/闭的电控信号,所述驱动电路根据所述电控信号控制高压防爆电磁阀的开闭完 成指令下传。 所述目标导向数据输入步骤中,所述FPGA芯片收到预设井眼轨迹数据和/或轨迹 参数后,还会将所述预设井眼轨迹数据和/或轨迹参数反馈至数据存储器中,并且,所述智 能计算步骤中,所述FPGA芯片计算差异值确定需要驱动调整的导向结果也会对应同步反馈 至数据存储器中,形成目标导向数据、MWD检测数据与智能计算的导向结果对应的旋转导向 钻井数据库。 所述智能计算步骤之前,还包括比对步骤,数据存储器中的数据比对单元根据 FPGA芯片反馈的预设井眼轨迹数据和/或轨迹参数,以及MWD随钻测量单元实时采集的井眼 轨迹参数和辅助参数,与旋转导向钻井数据库中的数据进行比对,将比对结果判定相同和/ 或在设定阈值范围内属于相似的结果对应的导向结果作为FPGA芯片向编码器的输出结果, 并跳过智能计算步骤。 所述智能计算步骤中所述FPGA芯片收到所述目标导向数据输入步骤和MWD检测数 据上传步骤的数据后,对所述MWD检测数据上传步骤的数据中的脉冲信号进行解码,基于 FPGA芯片中的旋转导向下传参数计算算法,计算出目标导向轨迹所需要的泄流泥浆排量, 所述FPGA芯片将计算结果传入编码器,进行指令数据编码。 与现有技术方案相比,本发明技术方案的有益效果如下: 本发明技术方案通过实时接收MWD上传数据和用户输入的目标导向数据,采用智能指 令计算器精确获取旋转导向下传指令,实现泄流泥浆排量调整,形成特定旋转导向钻井下 传编码指令,实现旋转导向智能指令下传,采用本方法进行旋转导向指令,只需一次性输入 目标导向数据,即可实现指令计算和指令下传控制,无需人工频繁开关泵或调节泥浆泵泵 冲数,同时基于实时采集数据和目标导向数据而计算出的下传指令更符合旋转导向实际需 要,解决人工手动调节泥浆泵排量速度慢、精度低、编码错误率高问题,降低了现场工作的 人员的工作强度、简化了工作流程,也提升了泥浆泵等装备使用寿命。 附图说明 本发明的前述和下文具体描述在结合以下附图阅读时变得更清楚,附图中: 图1为本发明的一种优选方案的系统结构示意图。











