
技术摘要:
本发明公开了一种高压柜操作机器人,包括车架、行走机构、执行机构和控制系统,所述行走机构用于驱动本装置的整体前进后退,执行机构用于进行热备用冷备用的转换,所述控制系统用于控制行走机构和执行机构的动作,还包括检测转换装置;本装置可在执行机构进行热备用冷 全部
背景技术:
地面生产系统是大型的电力公司煤炭破碎、筛选、运输、存储、装车的关键与核心; 在储运中心的地面生产系统设备有装车站、破碎站、筛分车间、胶带机、破碎机等多种大型 的机器;提到设备的点检与检修维护,烦、险、多已经成为储运中心设备的点检与检修维护 工作所面临的重大难题;为保证设备维护保养作业的绝对安全,中心规定任何设备的检修 与点检作业除在现场采取二次保护之外必须从源头切断一次动力电源,进入设备内部作业 必须的安全措施为严格落实;虽然设备的误启动隐患消除了,但是停送电作业的操作电工 安全风险加大了。地面生产系统的胶带机、破碎机等高压设备需要进行热备用、冷备用的转 换;假设工作人员用摇把平均每天对高压设备操作5次;按每台设备的两个驱动电机停送电 各一次,那么每年对高压设备完成5*2*2*30*12=7200次操作,这样的数字潜在的风险有多 大可想而知;怎样才能既圆满完成大量停送电工作,又能保证作业人员安全,确保万无一 失;成为了急需解决的问题。 例如专利申请号为201911138031.2的一种高压停送电机器人,本装置通过行走机 构移动到指定位置,转动节杆伸入高压配电柜的开关柜与开关钮配合后旋转,进行冷备用 热备用的转换;虽然本装置不改变配电柜的整体结构,通过机器人代替人力,在完成大量停 送电工作,又能保证作业人员安全,确保万无一失;但是本装置无法对高压配电柜智能操控 装置的转换开关进行转换。 转换开关包括零位、远方位、就地位三个档位;转换开关处于远方位时,动力柜二 次控制线路远控接通,此时允许远程操控(也就是可以进行远程分合闸)。转换开关处于零 位时,动力柜二次控制线路电源断开,任何操控失效。转换开关处于就地位时,动力柜二次 控制线路近控接通,此时允许机旁操控(也就是可以进行机旁分合闸)。在如果一种高压停 送电机器人在把热备用状态动力柜转换为冷备用状态作业操作时,如果转换开关任然处于 远方位,这时如果远程操作室出现操作失误,对正在进行热备用冷备用转换的高压配电柜 发出合闸信号,使高压柜的小车转换至合闸状态,这种情况会造成高压柜小车高压耦合装 置与母线耦合装置在临界接触时,产生高压拉弧事故,非常危险。在把冷备用状态动力柜转 换为热备用状态作业操作时也一样,必须保证转换开关处于零位时才可以驱动高压停送电 机器人进行热备用冷备用转换。 所以,为了保证圆满完成大量停送电工作,又能保证安全性;现有的做法是,高压 停送电机器人进行热备用冷备用转换时,首先人工把转换开关转换至零位,这样保证在操 作中高压配电柜柜不能进行任何操作,即使远程操作室出现操作失误,也能杜绝事故的发 生;然后高压停送电机器人进行热备用冷备用转换;高压停送电机器人进行热备用冷备用 转换时,转换开关处于零位,高压停送电机器人可直接进行冷备用到热备用转换,然后人工 将转换开关调至远方位;保证远程操作室可以继续对高压配电柜进行远程分合闸。 4 CN 111571606 A 说 明 书 2/10 页 为此,发明人设计一种高压柜操作机器人,本装置可在高压停送电机器人进行热 备用冷备用转换前,自动把转换开关转换至零位;在冷备用到热备用转换结束后,本装置将 转换开关由零位转换至远方位;保证远程操作室可以继续对高压配电柜进行远程分合闸。
技术实现要素:
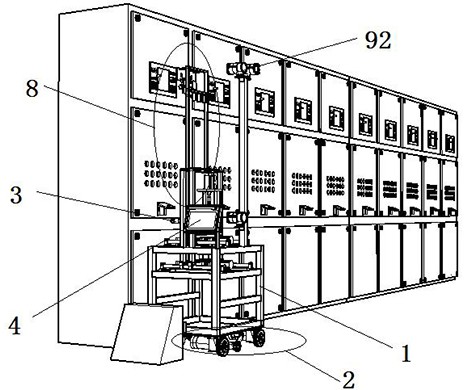
本发明的目的在于提供一种高压柜操作机器人,本装置可在执行机构进行热备用 冷备用转换前,把转换开关通过检测转换机构转换至零位;同时,在冷备用到热备用转换结 束后,自动将转换开关由零位转换至远方位;保证高压停送电机器人进行热备用冷备用转 换时的安全性,同时节省人力。 本发明采用的技术方案如下:一种高压柜操作机器人,包括车架、行走机构、执行 机构和控制系统,所述行走机构用于驱动本装置的整体前进后退,执行机构用于进行热备 用冷备用的转换,所述控制系统用于控制行走机构和执行机构的动作,还包括检测转换装 置,所述检测转换装置包括检测连接轴、滑套、检测固定板、检测驱动块;所述检测连接轴通 过轴座固定于车架两侧,检测连接轴上套设有滑套;所述检测连接轴之间设有检测固定板, 检测固定板通过螺栓与车架固定;所述检测固定板两侧竖设有检测挡板;所述检测挡板中 间位置相对开设有检测丝杠安装孔,检测丝杠安装孔内转动安装有检测丝杠;检测丝杠的 右端穿出检测挡板与检测电机的电机轴通过联轴器固定,所述检测电机通过螺栓与检测固 定板固定;所述检测丝杠上螺纹安装有与检测丝杠相配合的的检测驱动块;所述滑套与检 测驱动块的上端固定有支架安装板;支架安装板的四个角竖直固定有支撑架,支撑架上侧 安装有检测支架;所述检测支架的底部设有检测激光传感器,检测支架的的顶部通过螺栓 固定安装有转换电机;所述转换电机的电机轴上粘接固定有与高压配电柜的转换开关相配 合的转换头;所述转换头为梯形截面,转换头靠近转换电机的一侧设有安装孔,转换头远离 转换电机的一侧设有梯形槽。 具体的,所述转换电机上侧设有两个检测电磁传感器,所述检测电磁传感器通过 直角安装板与转换电机固定;所述检测电磁传感器之间的夹角,等于高压配电柜转换开关 远方位与零位的夹角;所述转换电机的电机轴上垂直焊接有限位铁棒,所述限位铁棒垂直 于转换头梯形截面所在的平面。 进一步,所述检测转换装置还包括三个颜色识别传感器和定位板,所述定位板为 “T”字形结构,定位板两侧设有方形的缺口;所述定位板中间位置竖直设有传感器安装孔, 所述传感器安装孔的位置与开关柜智能操作装置的仪表盘的红、绿色标识相对应;所述传 感器安装孔内固定安装有颜色识别传感器,所述颜色识别传感器的探头与定位板处于同一 平面;定位板通过连接件与检测支架固定连接;所述连接件包括硬质弹簧和弹簧安装座,所 述弹簧安装座胶粘于定位板靠近检测支架一侧,所述检测支架上与定位板相对应的位置分 别焊接有弹簧安装座,弹簧安装座之间安装有硬质弹簧。 优选的,所述定位板上开设有两个定位通道;开关柜智能操作装置的仪表盘左右 两侧,固定有两个与定位通道相配合的凸起物;所述凸起物为圆锥形铁块,圆锥前侧为弧形 过度;所述定位通道为圆形通道。 具体的,所述执行机构包括耦合机构和自适应机构,所述自适应机构包括左右驱 动块、左右连接轴、左右固定板;所述左右固定板的两端设有竖直的平台一和平台二,所述 5 CN 111571606 A 说 明 书 3/10 页 平台一和平台二上相对开设有丝杠通道,丝杠通道上装有左右丝杠,左右丝杠的右端伸出 平台二与左右电机的电机轴通过联轴器固定;所述左右电机与左右固定板通过螺栓固定连 接;左右固定板上侧设有与左右丝杠相配合的左右驱动块;所述左右驱动块上侧焊接有自 适应调节板,所述自适应调节板上固定连接有自适应连接轴;所述左右固定板两侧设有左 右连接轴,左右连接轴上套设有滑套;所述滑套上端通过螺栓分别固定有第一横梁和第二 横梁,所述第一横梁和第二横梁之间焊接有加强板;所述第一横梁上与自适应连接轴相对 应位置设有安装通道;所述自适应连接轴穿过安装通道;第一横梁与自适应调节板之间的 自适应连接轴上穿有压缩弹簧;所述第一横梁上设有自适应激光传感器,所述自适应激光 传感器通过角钢与第一横梁固定,自适应激光传感器的探头正对安装通道;所述耦合机构 与第一横梁和第二横梁固定连接;所述耦合机构包括上下驱动块、上下固定板:所述第一横 梁、第二横梁的一端竖直固定有上下固定板,上下固定板上端设有上挡板、下端设有下挡 板,上挡板设有上通道,下挡板设有与上通道相对应的下通道;所述上挡板与下挡板之间焊 接固定有上下连接轴,所述上下连接轴为两根分别竖直设于上通道左右两侧,上下连接轴 上设有滑套;上通道上设有上下丝杠,所述上挡板上端面固定连接有升降电机,升降电机的 电机轴穿过上通道与上下丝杠通过联轴器固定连接;上下固定板上设有与上下丝杠相配合 的上下驱动块;所述上下驱动块与滑套的端面设有竖直的电机安装板,电机安装板上固定 连接有开关电机,所述开关电机的电机轴上固定连接有与现有高压配电柜的开关相配合的 转动节杆,所述转动节杆与开关电机的电机轴通过限距联轴器固定。 具体的,所述行走机构包括两个前驱电机和两个后驱电机,所述前驱电机和后驱 电机通过电机支架与车架底部固定连接,前驱电机和后驱电机的电机轴上固定连接有车 轮。 具体的,所述控制系统包括plc和扩展模块,所述plc与扩展模块电性连接;障碍激 光传感器、减速激光传感器、制动电磁传感器和柜号识别霍尔传感器与plc的输入端电性连 接;前后激光传感器、编码器、后退零点激光传感器、下行零点激光传感器、左右零点激光传 感器、检测激光传感器、检测电磁传感器、自适应激光传感器、颜色识别传感器分别与扩展 模块的输入端电性连接;plc的输出端分别通过步进驱动器与左右电机、升降电机和开关电 机电性连接;所述扩展模块的输出端分别通过步进驱动器与检测电机和转换电机电性连 接;扩展模块的输出端分别通过变频器与前驱电机和后驱电机电性连接;扩展模块的输出 端与制动器电性连接;充电插口与充电逆变器电性连接,所述充电逆变器与蓄电池的正负 极电性连接,充电逆变器的220V交流端通过开关与制动器和变频器的220V交流端电性连 接;所述开关与充电逆变器的220V交流端相对的一端与48V开关电源的交流输入端电性连 接,48V开关电源的直流输出端与步进驱动器的48V电源端电性连接;所述开关与充电逆变 器的220V交流端相对的一端与24V开关电源的交流输入端电性连接,24V开关电源的的直流 输出端与触摸屏电性连接,所述触摸屏与PLC的输入端电性连接。 优选的,所述车架上安装有状态视频采集系统;所述状态视频采集系统包括竖直 安装架和三个视频探头,所述视频探头固定安装于竖直安装架。 优选的,所述车架靠近高压配电柜一侧设有无轨纠偏装置,所述无轨纠偏装置包 括安装板、定滑轮和磁铁;所述安装板与车架底部固定连接,所述安装板远离车架1一侧设 有定滑轮,所述定滑轮水平设置,所述安装板远离车架一侧设有磁铁,所述磁铁最右侧与定 6 CN 111571606 A 说 明 书 4/10 页 滑轮最右侧的水平间距为2-3mm。 本发明的有益效果在于: 1.本装置可在执行机构进行热备用冷备用转换前,plc控制检测电机转动,检测支架向 高压配电柜移动,转换头与转换开关接触时,检测激光传感器检测距离,传递给plc,plc控 制检测电机停止转动,plc同时驱动转换电机顺时针转动,转换头驱动转换开关转换至零 位,此时可进行热备用到冷备用的转换;执行机构进行热备用冷备用转换;在冷备用到热备 用转换时,由于转换开关处于零位,所以先进行冷备用到热备用的转换,转换结束后,plc同 时驱动转换电机逆时针转动,将转换开关转换至远方位;此时高压配电柜开始工作,远程操 作室可以继续对高压配电柜进行远程分合闸,保证高压停送电机器人进行热备用冷备用转 换时的安全性,节省了人力。 2.所述转换电机上侧设有两个检测电磁传感器,转换头驱动转换开关由远方位至 零位,此时限位铁棒被检测电磁传感器感应,检测电磁传感器传递信号给plc,plc控制转换 电机停止转动;检测电磁传感器对转换电机转动角度的限位,相较于直接的plc控制转动角 度,更加的精准,可以避免发生误差时损坏高压配电柜的转换开关。 3.本装置通过三个颜色识别传感器,对开关柜智能操作装置的仪表盘进行检测, 通过颜色识别传感器对红色、绿色信号灯的检测,进而判断冷备用热备用有没有真实的转 换;通过硬质弹簧连接检测支架和定位板,使定位板与开关柜智能操作装置的仪表盘柔性 接触,避免检测过程中产生微小误差,对仪表盘的损坏;安装板上开设有两个定位通道;开 关柜智能操作装置的仪表盘左右两侧,固定有两个与定位通道相配合的凸起物,凸起物卡 入定位通道中,开关柜智能操作装置的仪表盘上红色、绿色信号灯可以精准与三个颜色识 别传感器对应;避免出现对位错误,从而引起识别错误。 4.通过自适应机构使转动节杆与高压配电柜的开关口柔性接触,避免损坏转动节 杆和高压配电柜的开关。 附图说明 图1为本发明的立体结构示意图。 图2为本发明的前驱电机、后驱电机位置示意图。 图3为本发明检测转换装置的结构示意图。 图4为本发明的支架安装板结构示意图。 图5为本发明的检测挡板结构示意图。 图6为本发明的检测激光传感器位置示意图。 图7为本发明的检测电机位置示意图。 图8为本发明的转换头结构示意图。 图9为本发明的定位板结构示意图。 图10为本发明的连接件节构示意图。 图11为本发明的凸起物位置示意图。 图12为本发明的定位通道结构示意图。 图13为本发明的耦合机构、自适应机构结构示意图。 图14为本发明的左右固定板结构示意图。 7 CN 111571606 A 说 明 书 5/10 页 图15为本发明的平台一、平台二位置意图。 图16为本发明的自适应调节板位置示意图。 图17为本发明的自适应连接轴结构示意图。 图18为本发明的角钢位置示意图。 图19为本发明的自适应机构初始状态示意图。 图20为本发明的自适应机构压缩状态示意图。 图21为本发明的限距联轴器位置示意图。 图22为本发明的上下固定板结构示意图。 图23为本发明的上通道、下通道结构示意图。 图24为本发明的电路原理示意图。 图25为本发明的电路原理局部放大图A。 图26为本发明的电路原理局部放大图B。 图27为本发明的电路原理局部放大图C。 图28为本发明的电路原理局部放大图D。 图29为本发明的状态视频采集系统结构示意图。 图30为本发明的无轨纠偏装置结构示意图。 图中:车架1、行走机构2、执行机构3、控制系统4、前驱电机5、后驱电机6、车轮7、检 测转换装置8、检测连接轴9、滑套10、检测固定板11、检测驱动块12、轴座13、检测挡板14、检 测丝杠安装孔15、检测丝杠16、检测电机17、支架安装板18、支撑架19、检测支架20、检测激 光传感器21、转换电机22、转换头23、安装孔24、梯形槽25、检测电磁传感器26、直角安装板 27、限位铁棒28、颜色识别传感器29、定位板30、缺口31、传感器安装孔32、连接件33、硬质弹 簧34、弹簧安装座35、定位通道36、凸起物37、耦合机构38、自适应机构39、左右驱动块40、左 右连接轴41、左右固定板42、平台一43、平台二44、丝杠通道45、左右丝杠46、左右电机47、自 适应调节板48、自适应连接轴49、第一横梁50、第二横梁51、加强板52、安装通道53、压缩弹 簧54、自适应激光传感器55、角钢56、上下驱动块57、上下固定板58、上挡板59、下挡板60、上 通道61、下通道62、上下连接轴63、上下丝杠64、升降电机65、上下丝杠66、电机安装板67、开 关电机68、转动节杆69、限距联轴器70、plc71、扩展模块72、障碍激光传感器73、减速激光传 感器74、制动电磁传感器75、柜号识别霍尔传感器76、前后激光传感器77、编码器78、后退零 点激光传感器79、下行零点激光传感器80、左右零点激光传感器81、步进驱动器82、变频器 83、制动器84、充电插口85、充电逆变器86、蓄电池87、开关88、48V开关电源89、24V开关电源 90、触摸屏91、状态视频采集系统92、竖直安装架93、视频探头94、无轨纠偏装置95、纠偏板 96、定滑轮97、磁铁98。











