
技术摘要:
本发明涉及具有高指向精度的小型反射镜转向机构,包括反射镜片,定位件、旋转件、驱动装置和传感器。本发明中采用拥有特定结构的固定件实现反射镜片的局部定位,通过驱动装置配合两组交叉簧片型柔性铰链来完成镜体与镜架结构的整体旋转,通过传感器和驱动装置的闭合控 全部
背景技术:
在某些空间光学仪器中,光机结构在随卫星载台沿轨道运行的过程中,由于卫星 载台自身微调能力有限,因而有时需要反射镜根据实际光线入射角度变化作小角度主动调 节,而镜体转向过程中不但需要保证其高指向精度,而且应尽量避免镜体的轴向平移,进而 造成光程差的改变,影响光学探测的精度。空间环境工作的光学器件比在地面实验环境伴 随更大的温度涨落,需要反射镜转向机构对外界温度的变化应具有一定的自适应能力。研 发一种具有高指向精度的小型反射镜转向机构具有重要意义。
技术实现要素:
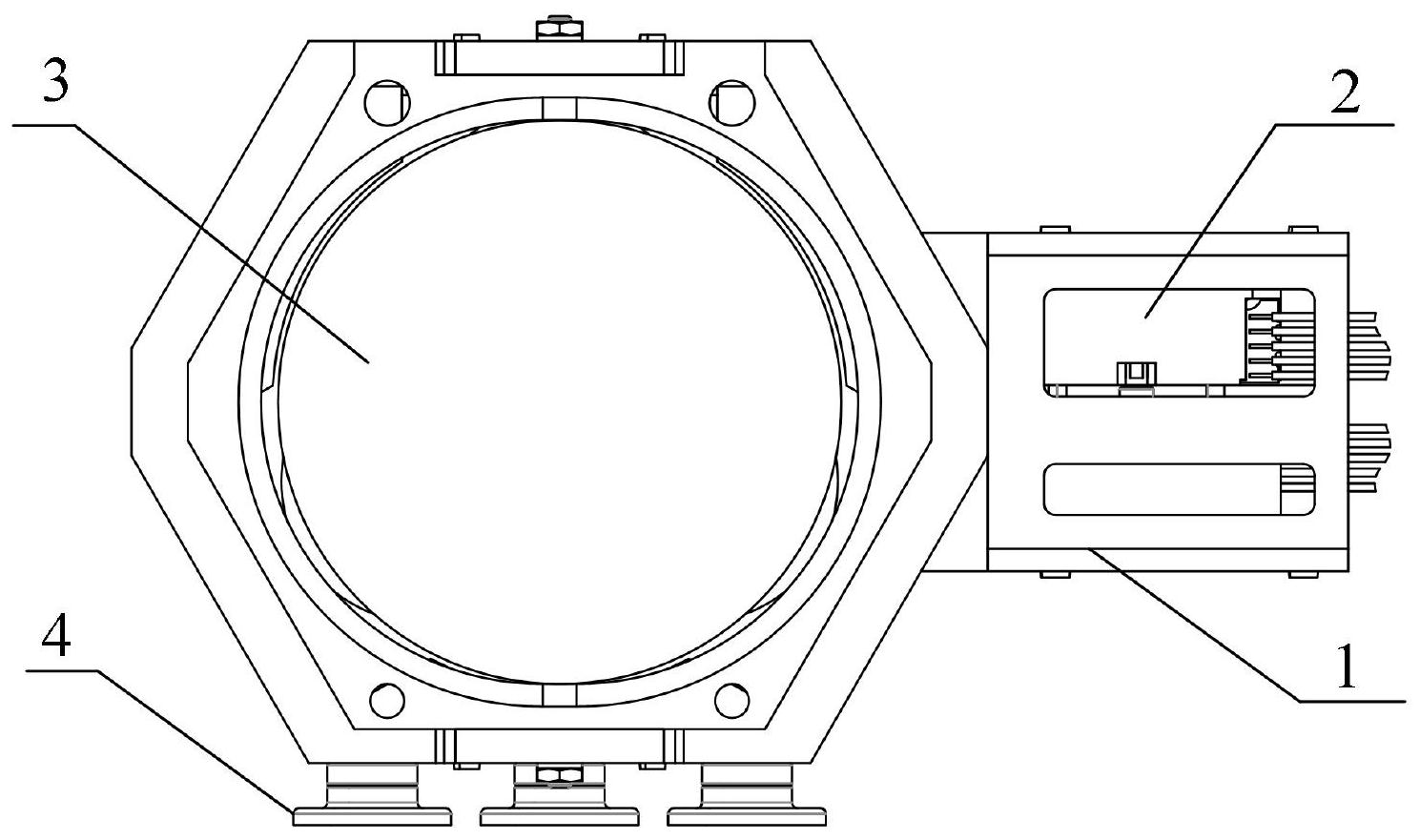
本发明的目的在于提供一种具有高指向精度的小型反射镜转向机构。 为实现上述目的,本发明采用如下技术方案:一种具有高指向精度的小型反射镜 转向机构,包括反射镜片,定位件、旋转件、驱动装置和传感器;所述反射镜片和定位件设置 于镜室内,反射镜片通过定位件固定连接镜架;所述旋转件为两组交叉簧片型柔性铰链,分 别设置于反射镜片径向两端;所述驱动装置连接旋转件的铰链连接轴,驱动旋转件带动反 射镜片旋转;所述传感器探测反射镜片的指向角度变化并反馈至驱动装置,与驱动装置形 成闭环控制。 本发明的转向机构采用定位件对反射镜片镜体结构进行局部定位,镜体及镜架结 构的整体旋转采用驱动装置配合旋转件,即两组交叉簧片型柔性铰链来完成,驱动装置驱 动自身推杆做直线运动,进而带动连接上下交叉簧片型柔性铰链的连接轴做平移运动,实 现反射镜片±2.5°的转动角度变化。镜体处于工作状态时,由传感器实时探测镜体的指向 角度变化,并反馈镜体转角信息,配合驱动装置形成闭环控制,对镜体指向角度进行实时的 校正和调节,以保证镜体在±2.5°的转角范围内具有高精度的指向性。本发明的转向机构 具有较小的体积,可以适应空间环境与地面实验环境的不同需求。 进一步的,所述定位件为宽体薄片柔性结构,包括与反射镜片边缘贴合的弧形头 部(薄片)、与镜架连接的固定脚及连接固定脚和弧形头部的连接件(宽体)。 进一步的,所述定位件弧形头部的曲率半径与反射镜片外边缘曲率半径相同;弧 形头部与镜片边缘胶接连接。 进一步的,所述定位件设有三组,所述三组定位件沿反射镜片外边缘均匀分布,即 沿镜架中心呈120°均布。采用侧面3点支撑的方式固定镜片,其可以有效消减镜体转动过程 中的振动载荷,以及镜体实际工作环境中的温度载荷导致的镜体形变。 进一步的,所述固定脚呈等腰梯形结构,短底边与连接件连接,长底边的两底角处 3 CN 111596457 A 说 明 书 2/3 页 通过定位螺钉固定于镜架。 进一步的,所述定位件设有三组,所述三组定位件沿反射镜片外边缘均匀分布,即 沿镜架中心呈120°均布。 进一步的,所述交叉簧片型柔性铰链采用上下对称布置,两组交叉簧片的几何中 心轴(旋转轴)共线且与反射镜片镜体表面重合,最大程度上消减镜体转动方向与电机直线 驱动方向的交叉耦合。此外,交叉簧片型柔性铰链采用整体对称式结构,结构紧凑,重量较 轻,所需安装空间较小,因而具有更小的惯性力和表面应力。两交叉簧片型柔性铰链的交叉 轴相重合,其转动精度高,轴漂较小,转动过程稳定。两个柔性铰链之间的连接轴可确保上 下两柔性铰链在驱动装置驱动作用下实时做到具有相同的形变量。 进一步的,所述反射镜片和定位件结构整体置于镜室内,交叉簧片型柔性铰链一 侧固定于镜室框,另一侧与镜架相连。 进一步的,所述所述驱动装置为压电陶瓷直线电机。压电陶瓷直线电机和高精密 传感器两者均属小功耗器件,使得该反射镜转向机构可以适应空间精密载台的环境。 进一步的,所述镜室框位于反射镜片镜面一侧的开口为直槽口型而非圆形,且开 口处均有切边,使得镜体在指向转动过程中镜室框不会对光线进行遮挡。 进一步的,所述镜室框底部设有可拆卸支撑脚,所述支撑脚为圆形薄片结构,支撑 脚上均有垫片,可以通过更换垫片对该结构的高度进行微调;支撑脚优选为3个。 本发明的优点及有益效果是: 1.本发明具有总体结构可靠、镜体指向角度调节精确、操控简便、占用空间较小等优 点,可以完成对小型反射镜的高精度转向角度调节,解决了在空间光机器件以及地面实验 环境对结构尺寸小,结构重量轻的高精度指向镜需求的实际问题。 2.本发明在进行小型反射镜指向角度调节时,采用了由压电陶瓷电机直接驱动柔 性铰链连接轴的方式进行,将柔性铰链连接轴的直线运动转化为镜体绕交叉簧片型柔性铰 链转动中心轴的旋转运动,以实现±2.5°的角度调节。 3.本发明在进行小型反射镜指向角度调节时,采用高精密传感器对镜体转动角度 进行实时探测,并进行信息反馈,再由高精度压电陶瓷直线电机进行位姿调节,保证了镜体 的转动精度。 4.本发明对小型反射镜的镜体支撑采用了双脚镜架片结构,该结构可以对镜体结 构受到的外部机械附加载荷以为温度载荷起到缓冲作用;实现镜体转向的交叉簧片型柔性 铰链机构相比于传统轴承机构而言,避免了轴承游隙对转动指向精度的影响、且拥有更小 的体积和结构稳定性。 5.本发明反射镜对应的镜室框开口为直槽口型而非圆形,且开口处均有切边,使 得镜体在指向转动过程中镜室框不会对光线进行遮挡。 附图说明 图1是本发明的总体结构图(主视图)。 图2是本发明的斜俯视结构图(等轴侧图)。 图3是本发明的内部结构组件图。 图4是本发明的定位件结构示意图。 4 CN 111596457 A 说 明 书 3/3 页 图5是图4的俯视结构及主视结构平面图。 其中:1、支撑框;2、驱动装置;3、反射镜片;4、镜室框支撑脚;5、连接轴;6、旋转件; 7、镜室框;8、镜架;9、定位件;91、弧形头部;92、连接件;93、固定脚、10、传感器。











