
技术摘要:
一种辅助行走机构辅助站立装置的设计方法,属于助老机械装置制造技术领域。本发明解决了目前辅助行走机构没有辅助站立功能,对使用者身高具有一定的局限性的问题。本发明包括步骤一:设定辅助站立装置的主要结构尺寸参数;步骤二:设定座椅构件尺寸参数;步骤三:设定 全部
背景技术:
根据国家统计局2018年全国人口统计数据显示,我国现有人口为139538万人,其 中65岁及以上人口为16658万,占全国人口的11.9%,按照国际社会的通行标准,我国已经 进入了老龄化社会。据《国家人口发展规划(2016-2030年)》统计,预计到2030年,我国60岁 以上人口总数将达到3.6亿,约占全国人口的25%,人口老龄化趋势将会越来越严重。而随 着经济迅速发展青壮年劳动力向大中型城市集中,导致“留守老人”和“空巢老人”现象日益 严重。据统计老年人独居占比18.4%,与配偶在一起居住占39.8%。可见,将近60%的老年 人不与子女共同居住,而在经济不发达地区和农村地区该现象占比更高。老年人的独立生 活将会出现很多难以克服的困难,其中意外摔倒后的重新站立是老年人最难以克服的困难 之一。伴随着年龄的增加,老年人的生理机能出现退行性改变,尤其是下肢机能的衰退更加 显著。随着身体机能衰退,身体灵活性、平衡能力下降,站立及行走晃动不稳,导致老年人极 容易摔倒,并且年龄越高意外摔倒的概率越大,而摔倒后的重新站立则非常困难。很多老年 疾病都会有躯体偏身麻木、肢体偏瘫等后遗症,这进一步加剧了老年人摔倒的概率,使摔倒 后老年人几乎难以完成重新的站立。大部分老年人往往具有行走能力而没有独立的站立能 力。许多具有行走能力的老年人,因缺乏独立站立能力而被限制了行动能力,从而进一步加 剧了身体机能的退化,因而需要辅助行走装置来辅助老年人行走同时保护老年人在行走时 的安全; 目前市场上现有的辅助行走装置存在以下缺陷: 1 .目前市场上现有的操作方便,价格便宜的辅助行走装置没有辅助站立功能,当 使用者需要站立式需借助他人的帮助才可以站立起来; 2.目前现有的辅助行走装置中,轮椅式辅助行走装置具有辅助站立功能,但轮椅 式辅助行走装置的结构过于复杂,价格十分昂贵,体积相对庞大,对于老年人来说不太适用 于居家或外出使用; 3.目前现有的辅助行走装置对于使用者的身高具有一定的局限性,使用者的身高 偏高或偏矮使用起来非常不便。 综上所述,本发明提供了一种辅助行走机构辅助站立装置用以解决上述问题。
技术实现要素:
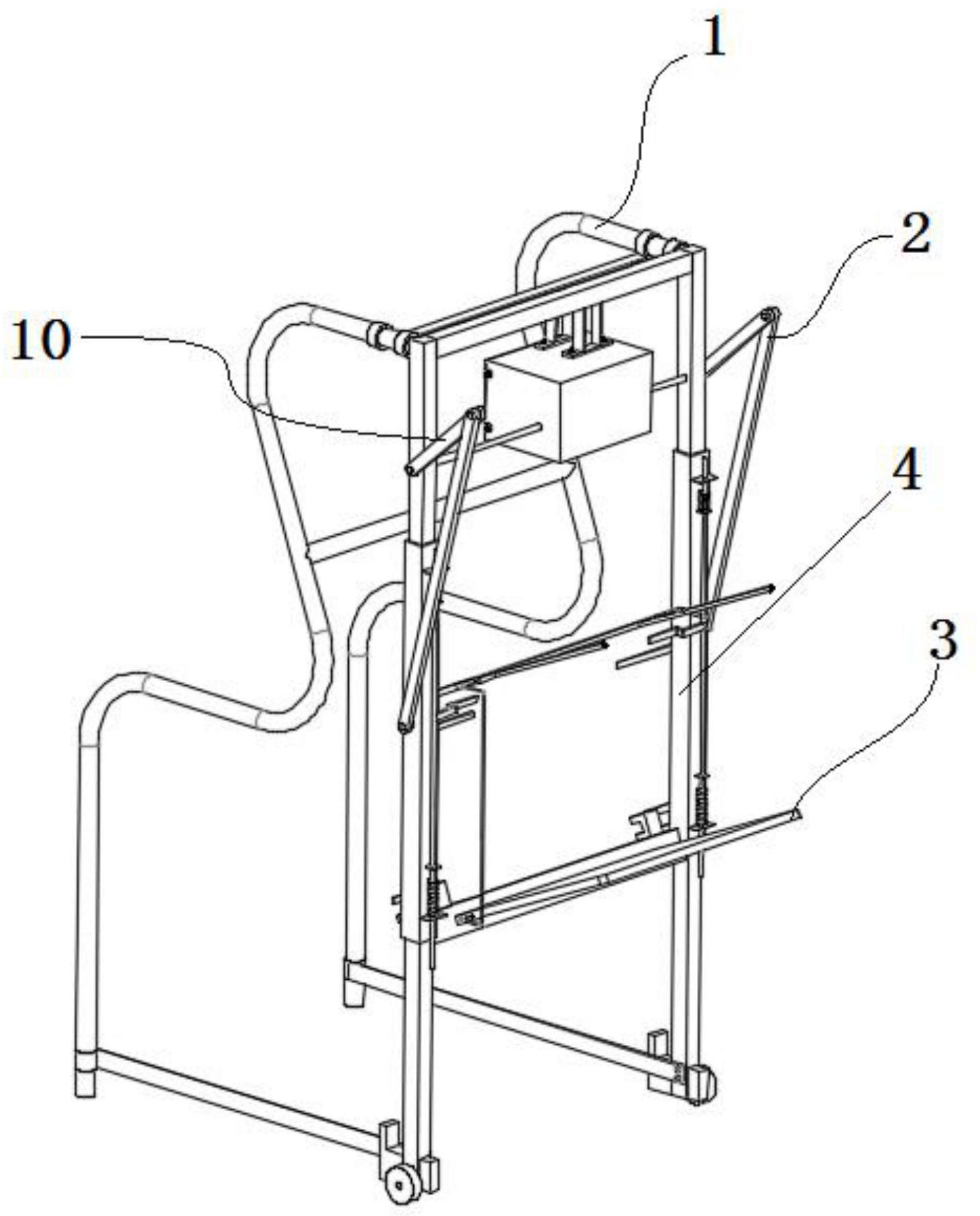
本发明的目的是为了解决现有的辅助行走装置不具备结构简单的辅助站立装置, 且对老年人的身高具有一定的局限性的问题,进而提供了一种辅助行走机构辅助站立装置 的设计方法。 本发明的技术方案: 8 CN 111588557 A 说 明 书 2/11 页 一种辅助行走机构辅助站立装置的设计方法,包括框架和辅助站立装置,辅助站 立装置安装在框架上; 所述辅助站立装置包括传动机构、座椅构件和移动套筒,移动套筒套装在框架上, 传动机构安装在框架上,座椅构件安装在移动套筒上; 包括以下步骤: 步骤一:设定辅助站立装置的主要结构尺寸参数; 步骤二:设定座椅构件尺寸参数; 步骤三:设定扶手构件尺寸参数; 步骤四:设定移动套筒构件尺寸参数; 步骤五:设定座椅支爪构件尺寸参数; 步骤六:设定座椅挡块构件尺寸参数; 步骤七:设定定位圆导杆构件尺寸参数; 步骤八:设定定位圆导杆挡块构件尺寸参数; 步骤九:设定座椅和扶手连杆构件尺寸参数。 进一步的,步骤一中设定辅助站立装置的主要机构尺寸参数的方法为: 1)设定辅助站立装置座椅构件行程范围内定位圆导杆距地面的最小距离: hmin=(0.1~0.3)hxtzg 式中:hmin取整数,单位为mm;hxtzg为使用人小腿加足高的高度,单位为mm; 2)设定辅助站立装置座椅构件行程范围内距地面的最大距离:hmax=hxtzg 式中:hmax取整数,单位为mm; 3)设定动力轴距地面的高度:hdlzg=hxtg hdtg Lqbc 式中:hdlzg百位取整数,单位为mm;hxtg为使用人小腿高,单位为mm;hdtg为使用人大 腿高,单位为mm;Lqbc为使用人前臂长,单位为mm; 4)设定主要动力构件外形尺寸: hmin=hdlzg-(L1 L2 L3x)-(20~50) hmax=hdlzg-[(L2-L1) L3x] L2-L1=L3s (80~100) 式中:L1为主动臂长, 单位为mm;L2为从动臂长,单位为mm;L3s为移动 套筒与从动臂连接铰链到移动套筒顶面的距离,单位为mm;L3x为移动套筒与从动臂连接铰 链到移动套筒底面的距离,单位为mm; 5)计算移动套筒的长度:L3=L3s L3x 式中:L3与L3x满足: 若不满足重新计算; 6)设定移动套筒的壁厚:Bttbh=(0.1~0.2)Btt 式中:Bttbh取整数,单位为mm;Btt为移动套筒外宽,Btt=40~60,单位为mm; 7)设定前立柱长:LBq=Btt-2Bttbh; 8)设定前立柱宽:LBk=LBq; 9)设定前立柱高:LBh=Ldlzg L1 (10~30)。 9 CN 111588557 A 说 明 书 3/11 页 进一步的,步骤二中设定座椅构件尺寸参数方法为: 1)设定座椅前端宽:Bzyb=(1.1~1.6)Bzztk 式中:Bzyb取偶整数,单位为mm;Bzztk为使用人坐姿臀宽,单位为mm; 2)设定座椅后端宽:Bzyz=Bzyb (80~200) 式中:Bzyz取偶整数,单位为mm; 3)设定座椅长:Lzy=(0.6~0.8)Lzs 式中:Lzy取整数,单位为mm;Lzs为使用人坐深,单位为mm; 4)设定座椅小端高:hzyb=(1.5~2.5)φzyz 式中:hzyb取整偶数,单位为mm;φzyz为座椅转轴直径,φzyz=5~10,单位为mm; 5)设定座椅大端高:hzydd=Btt (10~20); 6)设定座椅大端长:Lzybdd=hzyb; 7)座椅连杆孔与座椅转轴孔距离:LzLzz=BzfLgc。 进一步的,步骤三设定扶手构件尺寸参数的方法为: 1)设定扶手内宽:Bfsnk=(1.1~1.2)Bxk 式中:Bfsnk取偶整数,单位为mm;Bxk为使用人胸宽,单位为mm; 2)设定扶手机构总宽:Bfsz=Bzyz; 3)设定扶手支爪高:hfszzg=2φfsz 式中:φfsz为扶手转轴直径,φfsz=4~10,单位为mm; 4)设定扶手支爪宽: 式中:Bfszzk取整数,单位为mm; 5)设定扶手支爪轴杆长:Lfszgc=hfszzg; 6)设定扶手总长:Lfs=Bxh hfszzg (50~100) 式中:Lfs取整,单位为mm;Bxh为使用人胸厚,单位为mm; 7)扶手支架杆宽: 8)扶手支架转轴孔高: 9)扶手支架壁厚:hfszjbh=Bfszzk; 10)扶手支架长:Lfszjc=LzLzz 2Bfszjbh; 11)扶手支架高:hfszjg=hfszzg。 进一步的,步骤四设定移动套筒构件尺寸参数的方法为: 1)座椅与扶手转轴间距: 式中:Lttzz取整数,单位为mm; 2)移动套筒下耳片距套筒下底面距离:Ltxtx=30~60mm; 3)移动套筒上耳片距套筒上顶面距离:htstd=Ltxtx; 4)移动套筒上、下耳片宽度:Btsxdp=Btt; 5)移动套筒上、下耳片长度: 10 CN 111588557 A 说 明 书 4/11 页 进一步的,步骤五设定座椅支爪构件尺寸参数的方法为: 1)座椅支爪手指高:hzyzzsz=5~10mm; 2)座椅支爪手指宽:Bzyzzsz=(1~3)hzyzzsz; 3)座椅支爪总高: 4)座椅支爪孔高: 5)座椅支爪孔宽:Bzyzzk=(2~4)Bzyzzsz; 6)座椅支爪总宽:Bzyzz=2Bzyzzsz Bzyzzk; 7)座椅支爪指长: 8)座椅支爪总长: 进一步的,步骤六设定座椅挡块构件尺寸参数的方法为: 1)座椅挡块支手高度: 2)座椅挡块总高度:hzydk=hzydkzs hmin; 3)座椅挡块上端长: 式中:Lzydksk取整数,单位为mm; 4)座椅挡块宽度:Bzydk=LBq; 5)座椅挡块下端长: 进一步的,步骤七设定定位圆导杆构件尺寸参数的方法为: 1)定位圆导杆下档片到杆底面距离: Lgxpd=hzydkzs (hzyzz-hzyb) Ltxtx Lgxth (1.5~3)hgdk; 2)定位圆导杆座椅档片到下挡片距离: 式中:Lgdxdp取整 数,单位为mm;hgdk为定位圆导杆座椅挡片高度,hgdk=10~20mm,单位为mm;Lgxth为定位圆导 杆下方弹簧长度,Lgxth=60~100mm,单位为mm; 3)定位圆导杆座椅档片直杆长: 式中:Lgdzg取整数,单位为mm; 4)定位圆导杆座椅挡片总长: 式中:Lgdzc取整数,单位为mm; 5)定位圆导杆直径: 式中:φdydg取整数,单位为mm; 6)定位圆导杆上、下挡片长度:Lydgsxd=Ltsxdp-(1~4) 式中:Lydgsxd取整数,单位为mm; 7)定位圆导杆上、下挡片宽度:Bydgsxd=Lydgsxd; 8)定位圆导杆座椅挡片总宽: 式中:Bgdkzk取整数,单 11 CN 111588557 A 说 明 书 5/11 页 位为mm;Bgdg为定位圆导杆座椅挡片厚度,Bgdg=φdydg,单位为mm; 9)定位圆导杆下弹簧不压缩时上挡片到套筒上挡片距离: lgsdptsdp=hzydkzs (hzyzz-Lzybdd) Lgsth-(3~5)mm 式中:Lgsth为定位圆导杆上方弹簧长度,Lgsth=(20~30),单位为mm; 10)定位圆导杆上挡片到座椅挡片的长度: Lydgsdzyd=L3-Ltstd-Ltxtx-Lgxth-Lgsdptsdp-Lgdxdp; 11)定位圆导杆总长: 进一步的,步骤八设定定位圆导杆挡块构件尺寸参数的方法为: 1)定位圆导杆挡块高度:hydgdk=hmin; 2)定位圆导杆挡块宽度:Bydgdk=Btsxdp; 3)定位圆导杆挡块长度:Lydgdk=Bttbh Ltsxdp。 进一步的,步骤九设定座椅和扶手连杆构件尺寸参数的方法为: 1)连杆构件直径: 2)座椅端连杆构件长: 式中:LsfLgczy取整数,单位为mm; 3)扶手端连杆构件长:LzfLgcfs=LzfLgczy 式中:LzfLgcfs取整数,单位为mm; 4)连杆构件宽: 式中:BzfLgc取整数,单位为mm; 5)连杆构件高度:hLg=Lttzz。 本发明的有益效果: 1 .本发明的一种辅助行走机构辅助站立装置的设计方法根据老年人意外摔倒后 重新站立的实际需求与老年人的身体状况,结合人机工程学理论与机械设计理论,根据使 用人身体基本尺寸确定辅助站立装置的主要技术参数,并推导出其他主要构件的结构尺寸 参数,对于身高不等的老年人具有良好的适应性; 2.本发明的辅助行走机构同时具备辅助站立装置,辅助站立装置的结构简单,本 发明的辅助站立装置充分考虑了老年人身体机能退化的事实,有效、正确地设计出符合老 年人生理需求的辅助站立装置; 3.按照本发明涉及处的辅助行走机构辅助站立装置结构简单,操作方便适用于老 年人独立使用,具有较好的便携性可以居家或外出使用,有效避免了老年人因意外摔倒而 无法站立情况的发生。 附图说明 图1是按照本发明设计方法设计出的辅助行走机构辅助站立装置的结构图; 图2是按照本发明设计方法设计出的辅助行走机构辅助站立装置主动件主视图; 图3是按照本发明设计方法设计出的辅助行走机构辅助站立装置从动件主视图; 图4是按照本发明设计方法设计出的辅助行走机构辅助站立装置移动套筒结构 图; 12 CN 111588557 A 说 明 书 6/11 页 图5是按照本发明设计方法设计出的辅助行走机构辅助站立装置前立柱结构图; 图6是按照本发明设计方法设计出的辅助行走机构辅助站立装置座椅构件结构 图; 图7是图6中座椅转轴的局部示意图; 图8是按照本发明设计方法设计出的辅助行走机构辅助站立装置座椅支爪结构 图; 图9是按照本发明设计方法设计出的辅助行走机构辅助站立装置座椅挡块结构 图; 图10是按照本发明设计方法设计出的辅助行走机构辅助站立装置定位圆导杆构 件结构图; 图11是按照本发明设计方法设计出的辅助行走机构辅助站立装置定位圆导杆挡 块构件机构图; 图12是图10的侧视图; 图13是按照本发明设计方法设计出的辅助行走机构辅助站立装置扶手构件结构 图; 图14是图13中突出显示部分结构图; 图15是按照本发明设计方法设计出的辅助行走机构辅助站立装置座椅和扶手连 接构件结构图。 图16为一种辅助行走机构辅助站立装置的具体结构示意图; 图17为一种辅助行走机构辅助站立装置的辅助站立状态示意图; 图18为传动机构与移动套筒的结构示意图。 图中1-框架,2-传动机构,3-座椅构件,4-移动套筒,5-扶手构件,7-驱动箱,8-第 一连接架,9-定位圆导杆机构,10-辅助站立装置,11-把手,12-前立柱,13-上横梁,14-下横 梁,15-驱动箱安装架,121-定位圆导杆挡块,122-座椅挡块,22-主动臂,23-从动臂,24-动 力轴,31-座椅,32-座椅安装座,33-座椅支爪,34-连接杆,45-座椅固定挡板,46-上耳片, 47-下耳片,51-长杆,52-扶手杆,91-座椅挡片,92-导杆上挡片,93-导杆下挡片,84-导杆, 95-上弹簧,96-下弹簧。











