
技术摘要:
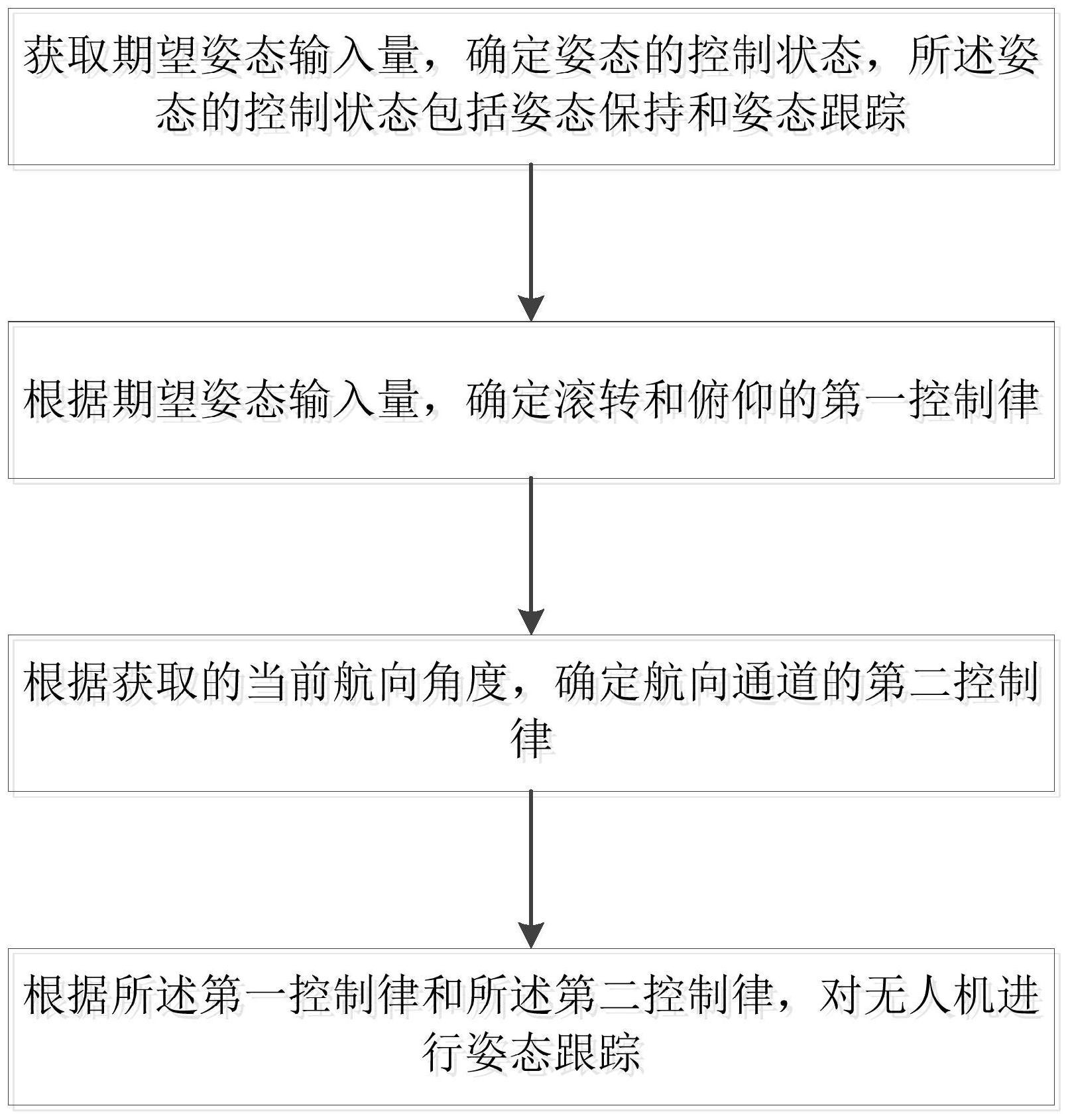
本发明公开了一种无人机飞行控制方法、终端、平台及存储介质,方法包括:获取期望姿态输入量,确定姿态的控制状态,所述姿态的控制状态包括姿态保持和姿态跟踪;根据期望姿态输入量,确定滚转和俯仰的第一控制律;根据获取的当前航向角度,确定航向通道的第二控制律; 全部
背景技术:
目前市场上无人机开始广泛应用,无人机具有体积小、重量轻、费用低、操作灵活、 安全性高的特点,广泛应用于航拍、检测、资源勘查等领域。 随着无人机的应用领域不断拓展,在海拔3500米以上低温、强风、微气象地区也有 了应用需求,在这些复杂环境条件下,如何保证无人机的姿态稳定是急需解决的问题。
技术实现要素:
有鉴于此,本发明实施例提供一种能够在复杂环境条件下保持姿态稳定的无人机 飞行控制方法、终端、平台及存储介质。 本发明的第一方面提供了一种无人机飞行控制方法,包括: 获取期望姿态输入量,确定姿态的控制状态,所述姿态的控制状态包括姿态保持 和姿态跟踪; 根据期望姿态输入量,确定滚转和俯仰的第一控制律; 根据获取的当前航向角度,确定航向通道的第二控制律; 根据所述第一控制律和所述第二控制律,对无人机进行姿态跟踪。 进一步,所述根据期望姿态输入量,确定滚转和俯仰的第一控制律,包括: 确定姿态角位移放大系数、姿态角速率的放大系数以及姿态角速率误差积分系 数; 根据所述姿态角位移放大系数、姿态角速率的放大系数以及姿态角速率误差积分 系数,计算俯仰角误差和俯仰角速率误差; 根据所述俯仰角误差和俯仰角速率误差计算滚转和俯仰的第一控制律。 进一步,所述根据获取的当前航向角度,确定航向通道的第二控制律,包括: 确定前馈通道的比例系数、航向角度误差、航向角度误差的放大系数、航向角度误 差以及航向通道指令值,计算航向角速率误差; 根据所述航向角速率误差计算航向通道的第二控制律。 进一步,所述根据所述第一控制律和所述第二控制律,对无人机进行姿态跟踪,包 括: 根据第一控制律计算产生的俯仰通道的调节量; 根据所述俯仰通道的调节量,生成各个电机的转速控制量; 根据所述各个电机的转速控制量,控制无人机的抬头力矩和/或低头力矩。 进一步,还包括对无人机进行定高控制的步骤,该步骤包括: 基于无人机的飞行环境,控制地面站的超声波启用或者关闭; 4 CN 111610796 A 说 明 书 2/9 页 确定地面站的超声波启用,则将超声波传感器获取的测量值作为高度控制回路的 反馈量; 确定地面站的超声波关闭,则将气压计获取的测量值作为高度控制回路的反馈 量; 根据所述高度控制回路的反馈量,控制无人机定高飞行。 进一步,还包括对无人机进行定点悬停控制的步骤,该步骤包括: 获取水平方向位置控制律和姿态控制律; 将水平方向位置控制律运算的输出作为姿态控制律的输入; 通过所述姿态控制律的运算来控制无人机的定点悬停。 进一步,还包括: 控制无人机自动飞行; 控制无人机自动起飞和自动着陆; 控制无人机进行航点飞行; 控制无人机自动返航; 对无人机的飞行模式进行切换控制。 根据本发明的第二方面,还提供了一种无人机控制平台,包括: 获取模块,用于获取期望姿态输入量,确定姿态的控制状态,所述姿态的控制状态 包括姿态保持和姿态跟踪; 第一确定模块,用于根据期望姿态输入量,确定滚转和俯仰的第一控制律; 第二确定模块,用于根据获取的当前航向角度,确定航向通道的第二控制律; 姿态跟踪控制模块,用于根据所述第一控制律和所述第二控制律,对无人机进行 姿态跟踪。 根据本发明的第三方面,还提供了一种终端,包括处理器以及存储器; 所述存储器用于存储程序; 所述处理器用于根据所述程序执行如本发明第一方面所述的方法。 根据本发明的第四方面,提供了一种存储介质,其中存储有处理器可执行的指令, 所述计算机可读存储介质存储有程序,所述程序被处理器执行完成如本发明第一方面所述 的方法。 上述本发明实施例中的一个或多个技术方案具有如下优点:本发明的实施例首先 获取期望姿态输入量,确定姿态的控制状态;接着,根据期望姿态输入量,确定滚转和俯仰 的第一控制律;以及根据获取的当前航向角度,确定航向通道的第二控制律;最后根据所述 第一控制律和所述第二控制律,对无人机进行姿态跟踪。本发明能够实时对无人机进行姿 态跟踪,能够在复杂环境条件下让无人机保持姿态稳定。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 5 CN 111610796 A 说 明 书 3/9 页 图1为本发明实施例的整体步骤流程图; 图2为本发明实施例的滚转和俯仰通道控制的结构示意图; 图3为本发明实施例的航向通道控制结构示意图。











