
技术摘要:
本发明公开了一种清洁装置及应用其的清洁机器人,清洁装置包括清洁模块和直驱电机,清洁模块与直驱电机相连,直驱电机包括转子组件、定子组件和安装座,转子组件装设在安装座的下方,定子组件位于转子组件与安装座组成的腔体中,清洁模块与转子组件连接;定子组件通电 全部
背景技术:
现有技术中清洁机器人的清扫模块存在如下的缺点:驱动部件的结构占空间大: 带有电机和减速传动装置的驱动部分往往结构尺寸大,相对整体机器人结构来说空间利用 效率低,增加整体结构设计难度。驱动部件装配布局复杂,内部零部件多:驱动部分需要根 据需求设计不同尺寸的齿轮和电机外壳,减速传动装置布局复杂,零部件多,装配复杂,安 装和维护成本高。
技术实现要素:
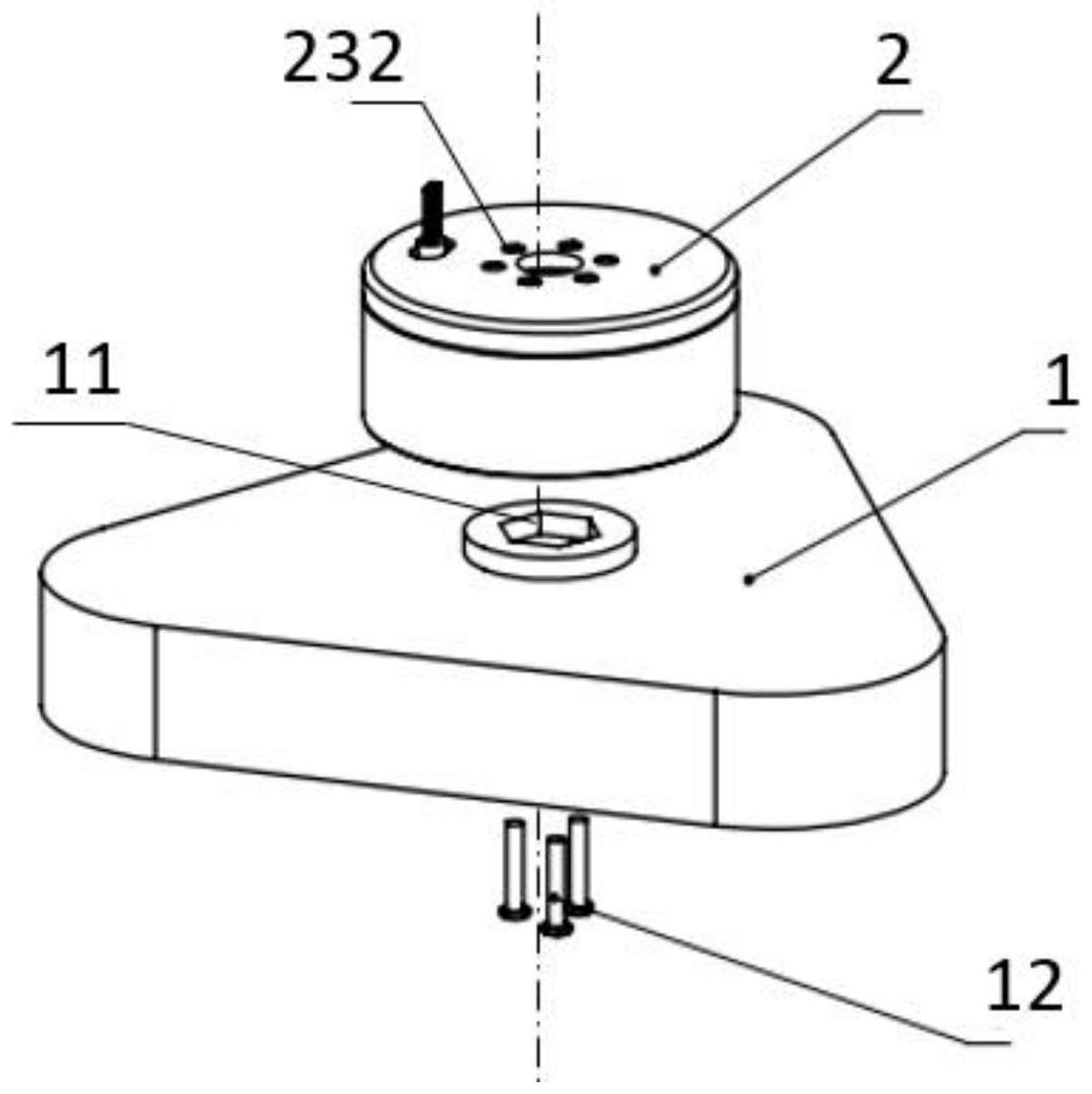
为了解决上述现有技术存在的问题和不足,本发明的目的是提供一种清洁装置及 应用其的清洁机器人,其结构精简,成本低,能效高。 为实现上述目的,本发明首先提供一种清洁装置,应用于清洁机器人,其包括清洁 模块和直驱电机,清洁模块与直驱电机相连,直驱电机包括转子组件、定子组件和安装座, 转子组件装设在安装座的上方,定子组件位于转子组件与安装座组成的腔体中,清洁模块 与转子组件连接;定子组件通电后,与转子组件产生磁力,驱动转子组件转动,带动清洁模 块转动。 进一步地,转子组件包括快拆接头,其装设在转子组件上,清洁模块通过快拆接头 与转子组件形成可拆卸式连接。 进一步地,快拆接头的下部分为多边形凸体,多边形凸体与清洁模块的安装槽相 匹配。 进一步地,多边形凸体的中间设有第一固定孔,清洁模块通过第一固定孔与固定 件的配合,与快拆接头紧固连接。 进一步地,多边形凸体的边角处设有多个第二固定孔,清洁模块通过第一固定孔 与固定件的配合,与快拆接头紧固连接。 进一步地,多边形凸体为六边形的凸体,安装槽为六边形。 进一步地,安装座上设有第三固定孔,安装座通过第三固定孔与固定件的配合与 清洁机器人连接。 进一步地,转子组件还包括电机外壳和磁铁,磁铁设置在电机外壳的内壁上,电机 外壳设置在定子组件的外部。 进一步地,转子组件还包括电机轴,电机轴的一端与电机外壳连接,电机外壳通过 电机轴与定子组件连接。 本发明同时提供一种清洁机器人,包括机器人本体和上述的清洁装置,清洁装置 装设在清洁机器人本体上。 与现有技术相比,本发明的有益效果包括:采用直驱电机作为清洁机器人清洁装 3 CN 111600435 A 说 明 书 2/4 页 置的动力源,转子组件设在外部,直接驱动清洁模块工作;本发明的直驱电机没有减速箱, 没有碳刷结构,不会因碳刷磨损的影响电机的使用寿命;去掉了减速箱,结构更精简,降低 了故障率,提升了动力传输的效率,消除了因减速箱而消耗的动能以及减速箱产生的噪音, 同时直驱电机本身转速低,振源阶次低,产生的噪音也降低了。本发明大大提升了清洁机器 人内部空间利用率,减少了零部件数量,降低了能耗,节省了成本。 附图说明 图1是本发明实施例一直驱电机的剖面图; 图2是本发明实施例一清洁装置的结构示意图一; 图3是本发明实施例一直驱电机的结构爆炸图; 图4是本发明实施例一清洁装置的结构爆炸图一; 图5是本发明实施例一清洁装置的结构爆炸图二; 图6是本发明实施例一直驱电机的外观结构图; 图7是本发明实施例一清洁装置的结构示意图二; 图8是本发明实施例一清洁装置的结构示意图三; 图9是本发明实施例一清洁装置的结构示意图四











