
技术摘要:
本发明公开的一种对硅晶片具有运输并除尘功能的机器人抓取设备,包括主体,所述主体外部设有工作区,所述主体于所述工作区内能左右运动,所述主体内设有联动腔,所述联动腔内固定设有联动电机,所述联动电机左右两端对称且动力连接设有转杆,右侧所述转杆外圆面且于所 全部
背景技术:
在工业生产中,硅晶片被广泛运用于集成电路的制造,通过切割及研磨其表面的 痕迹损伤后,硅晶片刻蚀数以百万计的晶体管以达到各种功能,而晶体管细小脆弱,硅晶片 表面不能有任何灰尘或污染,刻蚀之前的清洗变得尤为重要,现有技术大多是在超净间工 人穿洁净服进行工作,提高了各项成本。本发明阐明的一种能解决上述问题的装置。
技术实现要素:
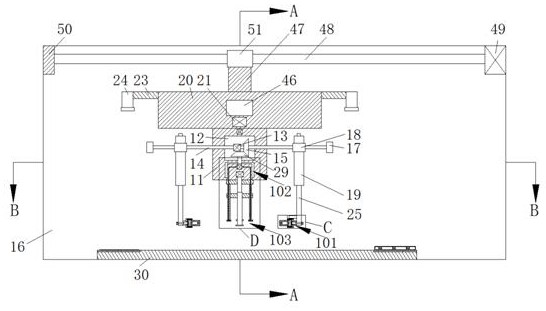
技术问题:刻蚀晶体管前,硅晶片大多在超净间且工作人员全身穿戴洁净服进行 工作,而工作人员穿洁净服前各项清理工作也提高了成本,降低了效率。 为解决上述问题,本例设计了一种对硅晶片具有运输并除尘功能的机器人抓取设 备,本例的一种对硅晶片具有运输并除尘功能的机器人抓取设备,包括主体,所述主体外部 设有工作区,所述主体于所述工作区内能左右运动,所述主体内设有联动腔,所述联动腔内 固定设有联动电机,所述联动电机左右两端对称且动力连接设有转杆,右侧所述转杆外圆 面且于所述联动腔内固定设有主动锥齿轮,左右两侧所述转杆远离所述联动电机一端穿过 所述主体并延伸至所述工作区内,左右两侧所述转杆于所述工作区内一端固定连接有固定 块,所述转杆于所述工作区内能左右滑动的滑动连接设有滑块,所述滑块前端固定连接设 有推杆,所述主体上方固定连接设有控制块,所述控制块内且于所述联动腔正上方设有控 制电机,所述控制电机与所述推杆上端电性连接,所述控制块左右两端固定连接设有连接 杆,两侧所述连接杆远离所述控制块一端固定连接设有头部朝向所述工作区底部的深度相 机,所述深度相机向下拍摄以确定硅晶片位置从而控制固定设有位于所述推杆下方的机器 手装置,所述机器手装置与所述推杆之间能上下滑动的滑动连接设有伸缩杆,所述机器手 装置固定连接于所述伸缩杆底部且随所述伸缩杆上下移动,左右两侧所述机器手装置之间 固定设有除尘装置,所述除尘装置上端固定连接设有位于所述联动腔下方的转动装置底 部,所述转动装置内包括设有开口向下的转动腔,所述转动腔内且于所述主体下端左右壁 之间能转动的设有转动块,所述转动块上端轴心固定连接设有转动杆,所述转动杆连通于 所述联动腔与所述转动腔且于所述联动腔内向上延伸至固定连接于位于所述联动腔内下 端且与所述主动锥齿轮相啮合的从动锥齿轮,所述除尘装置下端且位于所述工作区内底部 固定设有底座,机器手抓取位于所述底座左端的硅晶片并输送到位于所述底座右端的晶片 盒内。 可优选地,所述转动块内中心固定设有吸气机,所述吸气机左右两端对称设有开 口向下的吸气管,所述吸气机正下方固定设有升降电机,所述升降电机下端动力连接设有 螺杆。 4 CN 111604921 A 说 明 书 2/6 页 可优选地,所述除尘装置包括设有固定连接于所述转动块下端的升降固定块,所 述螺杆远离所述升降电机一端向下延伸且贯通于所述升降固定块中心,所述螺杆下端固定 连接设有螺杆固定块,所述螺杆上且位于所述升降固定块与所述螺杆固定块之间能上下滑 动的滑动连接设有升降转动块,所述升降转动块前端表面固定连接设有开口向下的真空发 生器,所述真空发生器与所述控制电机电性连接,所述真空发生器下端固定连接设有真空 吸盘,所述升降固定块下端左右两侧对称固定连接设有升降固定杆,所述吸气管于所述转 动块内向下延伸贯通有所述升降固定块及所述升降固定杆并于所述升降固定杆末端设有 开口向下的吸气口。 可优选地,所述联动腔正上方固定设有吹气机,所述吹气机前后固定设有开口向 下的后吹气管及前吹气管,所述前吹气管末端高于所述后吹气管末端且位于所述真空吸盘 上方。 可优选地,所述控制电机正上方固定设有微型电脑,所述控制块上端轴心固定连 接设有滑动连接杆,所述控制块上方固定设有滑动杆,所述滑动杆右端动力连接设有位于 所述工作区右上端的滑动电机且左端能转动的转动连接设有位于所述工作区左上端的,所 述滑动连接杆上端固定连接设有滑动连接于所述滑动杆上的下端,所述滑动杆正后方设有 左右端固定连接的导杆,所述于所述滑动杆及所述导杆上左右滑动。 可优选地,所述机器手装置内包括设有开口朝向所述真空发生器的联动块,所述 联动块靠近所述真空发生器一端设有滑动夹腔,所述滑动夹腔上下两侧对称设有带轮腔, 所述带轮腔内且正对滑动夹腔上下两端固定设有从动带轮,所述上下两侧从动带轮轴心固 定连接设有带轮杆,所述滑动夹腔上下两端对称且转动连接于所述带轮杆的分别设有向所 述滑动夹腔中心滑动的夹板,所述带轮腔内远离所述滑动夹腔一端固定设有主动带轮,上 下两侧所述主动带轮轴心之间固定连接设有蜗杆,所述主动带轮与所述从动带轮之间绕设 有传动带,上下两侧所述带轮腔之间位于所述联动块内且远离所述滑动夹腔一端设有蜗轮 腔,所述蜗轮腔上下壁之间固定设有能转动的涡轮,所述蜗杆轴心与所述涡轮上端表面相 啮合,所述涡轮远离所述滑动夹腔一端轴心固定连接设有涡轮杆。 可优选地,所述联动块靠近所述伸缩杆一端外表面固定连接设有固定转块,所述 固定转块内设有开口朝向所述蜗轮腔一端的切换腔,所述切换腔上下壁之间且位于所述靠 近所述伸缩杆一端转动连接设有动力杆,所述涡轮杆远离所述涡轮一端延伸至所述切换腔 内并与所述动力杆位于所述切换腔内一端转动连接,所述涡轮杆后端上下两侧对称固定连 接设有内连接块,所述切换腔内靠近所述伸缩杆一端内壁上下两侧对称固定连接设有外连 接块,所述动力杆外圆面上下两侧对称固定连接设有电磁滑动块,所述电磁滑动块内设有 与所述内连接块及所述外连接块正对且相同的凹槽,所述伸缩杆下端外表面固定连接设有 电磁电机,所述动力杆远离所述切换腔一端向外延伸且贯通所述伸缩杆下端与所述电磁电 机动力连接。 可优选地,所述伸缩杆右侧下端且位于所述联动块上方固定设有探测器,所述探 测器右端与所述伸缩杆固定连接。 可优选地,所述底座左右两侧对称设有位于所述工作区内前后壁之间前后输送的 输送带,左侧所述输送带前后输送硅晶片,右侧所述输送带上设有前后输送的晶体盒。 本发明的有益效果是:本发明通过将硅晶片进行先除尘后输送的方式,先将硅晶 5 CN 111604921 A 说 明 书 3/6 页 片由吸盘固定,通过除尘口对硅晶片表面进行吹气除尘,再通过机器手将硅晶片左右两端 夹住进行翻转,再对硅晶片背面进行除尘,机器手移动过程中带动硅晶片旋转达到全方位 除尘效果,两侧吸尘口通过吸气防止灰尘扩散,避免硅晶片被二次污染。 附图说明 为了易于说明,本发明由下述的具体实施例及附图作以详细描述。 图1为本发明的一种对硅晶片具有运输并除尘功能的机器人抓取设备的整体结构 示意图; 图2为图1的“A-A”方向的结构示意图; 图3为图1的“B-B”方向的结构示意图; 图4为图1的“C”的结构放大示意图; 图5为图1的“D”的结构放大示意图; 图6为图4的“E”的结构放大示意图。











