
技术摘要:
一种用于驱动作为被控制对象的负载(机械负载)的电动机的控制装置,具备前馈控制部、反馈控制部以及加减法运算器。前馈控制部被输入用于指定被控制对象的负载目标位置的位置指令信号,输出表示电动机的目标位置的前馈位置指令信号、表示电动机的目标速度的前馈速度指令 全部
背景技术:
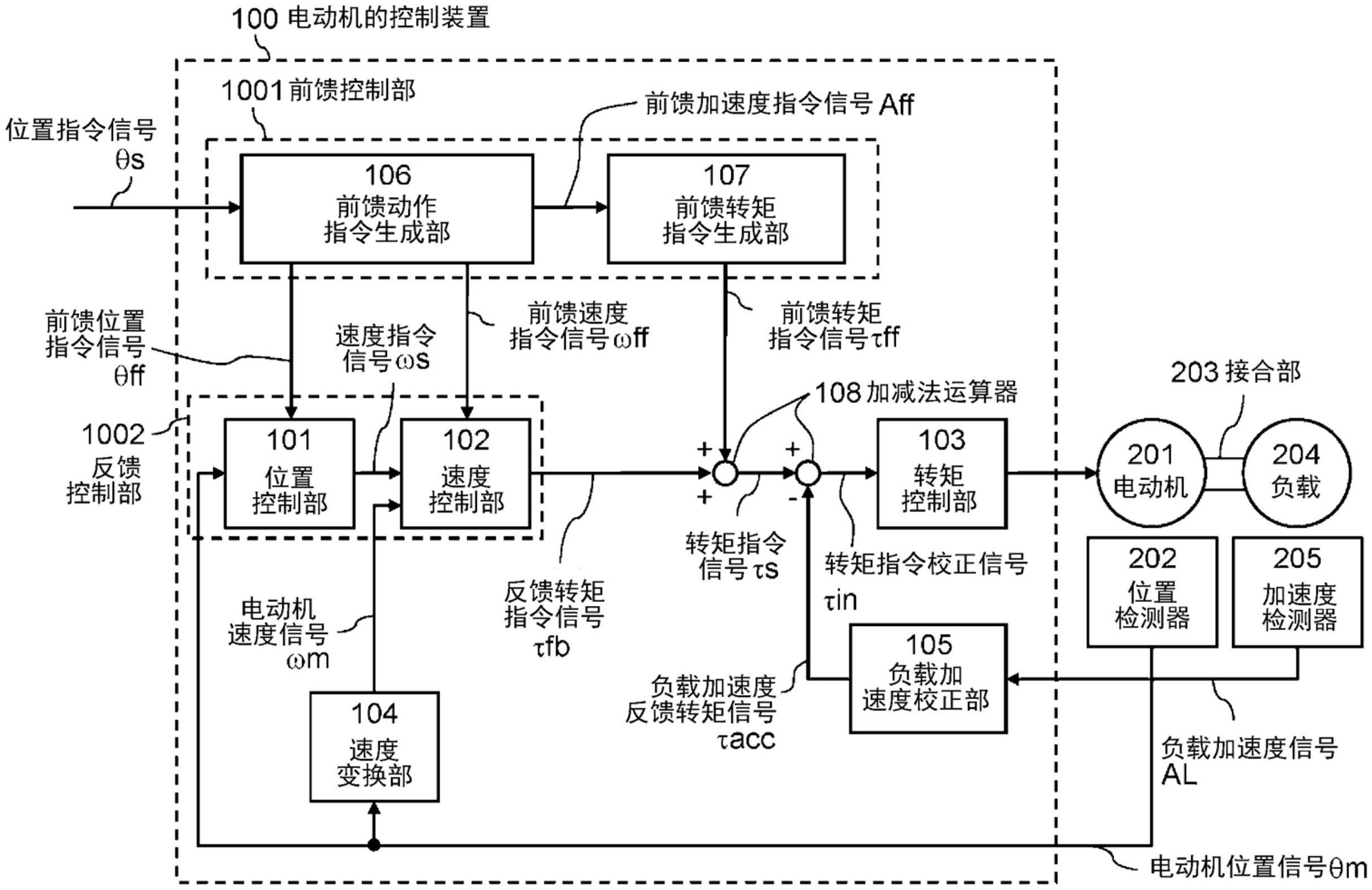
这种电动机的控制装置在内部至少具有前馈控制系统和反馈控制系统之一,使得 从上级控制器输入的位置指令与电动机及作为被控制对象的负载(机械负载)的位置一致。 这种电动机的控制装置根据位置指令和电动机的位置检测值来计算用于使位置指令与电 动机位置一致的转矩指令值,控制向电动机的定子绕组通电的电流,使得在电动机中产生 与转矩指令值相同的转矩,由此控制电动机及作为被控制对象的负载(机械负载)的位置。 然而,在电动机与作为被控制对象的负载(机械负载)的接合部的机械刚性低的情况下,在 加减速时或施加干扰时,容易在作为被控制对象的负载(机械负载)中产生由反共振引起的 振动,从而认识到课题在于与以往相比进一步提高稳定性和干扰抑制性。 针对该课题,以往的进给控制装置构成为:在作为被控制对象的负载(机械负载) 即滑块上设置加速度传感器,具备加速度反馈环来抑制在加减速时或施加干扰时在作为被 控制对象的负载(机械负载)中产生的振动,该加速度反馈环用于从转矩指令值减去对作为 被控制对象的负载(机械负载)的加速度检测值乘以作为加权系数的加速度反馈增益所得 到的值(例如,参照专利文献1)。 在以专利文献1等为代表的结构中,使加速度反馈增益越大,则由机械刚性引起的 振动越小。另一方面,在将本结构应用于具有前馈控制系统的电动机的控制装置的情况下, 负载的加减速动作所需要的转矩被从转矩指令值减去。因此,具有以下问题:指令跟踪性能 变差,导致在停止期间发生动作延迟、过冲或下冲等,无法同时实现稳定性和振动抑制。换 言之,在加速度反馈增益(加速度反馈量)与指令跟踪性能之间存在折衷的关系,为了同时 实现稳定性和振动抑制,希望进一步进行改良。 现有技术文献 专利文献 专利文献1:日本特开平6-91482号公报
技术实现要素:
本发明用于解决以往的课题。本发明的目的在于提供一种电动机的控制装置,具 有前馈控制系统和负载加速度反馈系统,在所述电动机的控制装置中,通过在保持指令跟 踪性能的同时,获得由负载加速度反馈产生的振动抑制效果,能够同时实现稳定性和振动 抑制。即,本发明提供一种电动机的控制装置,实现缓解或避免负载加速度反馈增益(加速 度反馈量)与指令跟踪性能之间的折衷关系,在保持指令跟踪性能的同时,提高了由来自负 3 CN 111587530 A 说 明 书 2/9 页 载侧的加速度反馈产生的振动抑制效果。 为了解决上述课题,本申请的发明人反复进行试验并且进行了深入研究。然后,发 现了一种在保持指令跟踪性能的同时,提高了由来自负载侧的加速度反馈产生的振动抑制 效果的新型的电动机的控制装置。其详情如下所述。 用于解决课题的第一方式是一种用于驱动作为被控制对象的负载(机械负载)的 电动机的控制装置,其具备前馈控制部、反馈控制部以及加减法运算器。 前馈控制部被输入用于指定被控制对象的负载目标位置的位置指令信号,输出表 示电动机的目标位置的前馈位置指令信号、表示电动机的目标速度的前馈速度指令信号、 以及表示在电动机中为了进行目标位置或目标速度所表示的动作而需要的转矩的前馈转 矩指令信号。 反馈控制部被输入前馈位置指令信号、前馈速度指令信号、表示电动机的位置的 电动机位置信号以及表示电动机的速度的电动机速度信号,输出反馈转矩指令信号,该反 馈转矩指令信号表示用于进行反馈控制使得电动机位置信号与前馈位置指令信号一致的 转矩指令。 加减法运算器从将前馈转矩指令信号与反馈转矩指令信号相加所得到的转矩指 令信号减去负载加速度反馈转矩信号,将所得的结果作为转矩指令校正信号输出,该负载 加速度反馈转矩信号是对表示作为被控制对象的负载的加速度的负载加速度信号乘以负 载加速度反馈增益所得到的。 前馈控制部生成前馈转矩指令信号,使得预先补偿在加减速动作时从转矩指令信 号减去的负载加速度反馈转矩信号的影响。 另外,关于第二方式,在第一方式的电动机的控制装置中,前馈控制部对通过前馈 位置指令信号的二阶微分计算出的前馈加速度指令信号乘以电动机的惯量与作为被控制 对象的负载的惯量与负载加速度反馈增益的相加值,由此生成前馈转矩指令信号。 另外,关于第三方式,在第一方式的电动机的控制装置中,加减法运算器通过从转 矩指令信号减去负载加速度反馈转矩信号来生成转矩指令校正信号,该负载加速度反馈转 矩信号是将对表示作为被控制对象的负载的加速度的负载加速度信号实施滤波处理后的 信号乘以负载加速度反馈增益所得到的。 前馈控制部通过将以下两个信号相加来生成前馈转矩指令信号,所述两个信号中 的一者是对通过前馈位置指令信号的二阶微分计算出的前馈加速度指令信号乘以电动机 的惯量与作为被控制对象的负载的惯量的相加值所得到的,所述两个信号中的另一者是将 对前馈加速度指令信号实施了与滤波处理等效的滤波处理后的信号乘以负载加速度反馈 增益所得到的。 通过解决上述的课题,具有前馈控制系统和负载加速度反馈系统的电动机的控制 装置不会导致指令跟踪性能因负载加速度反馈而降低,能够在保持指令跟踪性能的状态下 提高由负载加速度反馈产生的振动抑制效果。因此,能够同时实现稳定性和振动抑制。 本发明的电动机的控制装置在由前馈控制系统进行的前馈转矩运算中,预先补偿 由负载加速度反馈产生的加减速转矩的减去的部分。本发明的电动机的控制装置能够在保 持指令跟踪性能的同时,提高由负载加速度反馈产生的振动抑制效果,产业上的价值大。 4 CN 111587530 A 说 明 书 3/9 页 附图说明 图1是示出本发明的实施方式1的电动机的控制装置的结构的一例的图。 图2是示出本发明的实施方式1的负载加速度校正部的结构的一例的图。 图3是示出本发明的实施方式1的前馈转矩指令生成部的结构的一例的图。 图4是示出本发明的实施方式2的电动机的控制装置的结构的一例的图。 图5是示出本发明的实施方式2的前馈转矩指令生成部的结构的一例的图。











