
技术摘要:
本发明公开一种检测机器人及其系统。检测机器人包括:机器人壳体、动力机构和可拆卸的功能模块机构;动力机构用于驱动检测机器人移动,可拆卸的功能模块机构包括功能模块壳体,机器人壳体具有贯穿上下表面的安装槽,安装槽的前端的机器人壳体具有连通安装槽的安装口, 全部
背景技术:
气体绝缘组合电器设备(Gas insulated Switchgear,GIS)是目前电力系统中最 重要的设备之一,其运行可靠性直接关系到电网系统的安全稳定。现有的GIS设备的检测装 置功能单一,且不便于检测GIS设备的一些弯曲、异形等位置处的情况。
技术实现要素:
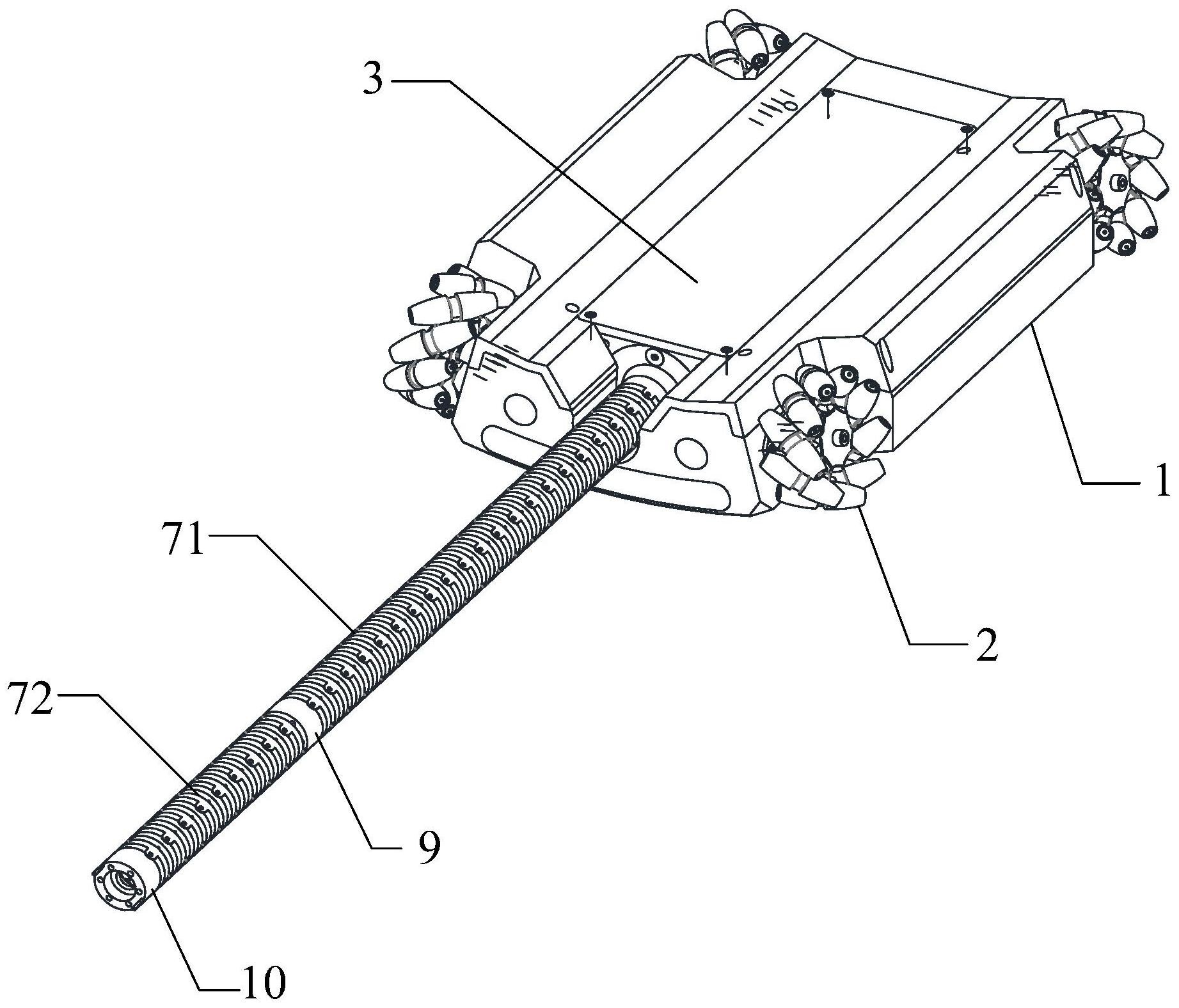
本发明实施例提供一种检测机器人及系统,以解决现有技术的GIS设备的检测装 置功能单一,且不便于检测GIS设备的一些弯曲、异形等位置处的情况的问题。 第一方面,提供一种检测机器人,用于检测GIS设备的内部,所述检测机器人包括: 机器人壳体、动力机构和可拆卸的功能模块机构;所述动力机构用于驱动所述检测机器人 移动,其中,所述可拆卸的功能模块机构包括功能模块壳体,所述机器人壳体具有贯穿上下 表面的安装槽,所述安装槽的前端的机器人壳体具有连通安装槽的安装口,所述功能模块 壳体可拆卸地安装在所述安装槽内; 其中,所述可拆卸的功能模块机构为柔性臂机构,所述柔性臂机构包括:驱动组件 和柔性臂;所述柔性臂包括:环形基座和柔性臂;所述环形基座固定设置在所述功能模块壳 体的前端的外表面上,且从所述安装口伸出,所述环形基座的前端与所述柔性臂的后端连 接,所述柔性臂的前端设置有检测传感器;所述驱动组件用于驱动所述柔性臂弯曲。 第二方面,提供一种检测机器人系统,包括:上述实施例所述的检测机器人、控制 器和收放线装置,线缆的一端连接所述检测机器人,线缆的另一端经过所述收放线装置连 接所述控制器; 其中,所述收放线装置包括:底板、支撑架、收放线机构、布线机构和绕线机构,所 述支撑架设置在所述底板上; 所述收放线机构包括:第一包胶轮、第二包胶轮和收放线驱动组件,所述第一包胶 轮固定套设在第一转轴上,所述第二包胶轮固定套设在第二转轴上,所述第一转轴的两端 和所述第二转轴的两端分别可转动地与所述支撑架的一端的两侧壁连接,所述第一包胶轮 和所述第二包胶轮均为哑铃型,所述第一包胶轮的两端分别和所述第二包胶轮的两端抵 接,使所述第一包胶轮的中部和所述第二包胶轮的中部具有可供所述线缆穿过的空隙,所 述空隙的尺寸与所述线缆的尺寸匹配,所述收放线驱动组件用于驱动所述第一转轴转动; 所述布线机构包括:布线轮、第二滑块、第二丝杠和第二丝杠驱动组件,所述第二 滑块的一端设置有布线轮安装口,所述布线轮可转动地安装在所述布线轮安装口中,所述 第二滑块啮合套设在所述第二丝杠上,所述第二丝杠的两端可转动地与所述支撑架的另一 端的两侧壁连接,所述第二丝杠驱动组件用于驱动所述第二丝杠转动; 所述绕线机构包括:卷筒和绕线驱动组件,所述卷筒的两端可转动地与所述支撑 5 CN 111551205 A 说 明 书 2/9 页 架的另一端的两侧壁连接,所述卷筒位于所述布线轮下方,所述绕线驱动组件用于驱动所 述卷筒转动。 这样,本发明实施例,通过设置可拆卸的功能模块机构,可以根据需要安装相应的 功能模块,特别是当可拆卸的功能模块机构为柔性臂机构时,可以控制柔性臂转动特定的 方向和角度,呈现特定的弯曲的形状,以便柔性臂可伸入到GIS设备的内部的一些弯曲、异 形的位置处,对这些位置进行检测;收放线装置可实现线缆的收放,收放过程简便易操作, 可应用在可移动的检测机器人上,线缆可整齐卷绕在卷筒上,不会出现在某一处堆积的问 题。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例的描述中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1是本发明实施例的检测机器人的结构示意图; 图2是本发明实施例的检测机器人的机器人壳体的结构示意图; 图3是本发明实施例的检测机器人的后视图; 图4是本发明实施例的柔性臂机构的结构示意图一; 图5是本发明实施例的柔性臂机构的结构示意图二; 图6是本发明实施例的柔性臂机构的连接环的结构示意图; 图7是本发明实施例的柔性臂机构的连接环相互连接的结构示意图; 图8是本发明实施例的柔性臂机构的支撑环的结构示意图; 图9是本发明实施例的柔性臂机构的环形基座的结构示意图; 图10是本发明实施例的柔性臂机构的驱动组件的侧视图; 图11是本发明实施例的柔性臂机构的驱动组件的俯视图; 图12是本发明实施例的异物清扫机构的俯视图(不包括功能模块壳体的顶部); 图13是本发明实施例的异物清扫机构的仰视图; 图14是本发明实施例的气体和环境检测机构的俯视图(不包括功能模块壳体的顶 部); 图15是本发明实施例的气体和环境检测机构的仰视图; 图16是本发明实施例的收放线装置的立体示意图一; 图17是本发明实施例的收放线装置的立体示意图二; 图18是本发明实施例的收放线装置的前视图; 图19是本发明实施例的具有外壳的收放线装置的立体示意图。











