
技术摘要:
本发明涉及一种多层多条空中轨道断轨式对接机构,包括纵向摆渡轨道(10)、纵向行走机构(20)、升降总成(30)和断轨对接总成(40),所述纵向行走机构可前后移动地设置在所述纵向摆渡轨道上,所述升降总成设置在所述纵向行走机构上,所述断轨对接总成设置在所述升降总成上。 全部
背景技术:
随着大型企业的自动化、无人化、智能化发展的需求。利用空中轨道上行驶的机器 人,消除企业的重点工作岗位、工作环境差岗位、工作强度高岗位的员工工作风险,为企业 减员增效,提高企业生产力,创建智能化的生产企业打好基础工作。未来的企业空中轨道将 向多层次、多条轨道的网络型发展,为行驶在空中轨道上的机器人提供更加机动灵活的作 业空间。 当前,在企业架设的空中轨道还在沿用单一性的空中轨道。需要在左右转弯和上 下坡(换楼层)时靠弯曲轨道来实现左右转弯和上下坡,由于弯曲轨道需要占用很大的空 间,不能满足机器人在狭小空间中的空中轨道上作业的要求。 基于此,为了更好的适应未来立体化空中轨道网络系统,本发明提供一种多层多 条空中轨道断轨式对接机构,在多层次、多条轨道的立体空中轨道网络系统中,利用纵向行 走机构带动断轨对接机构在纵向轨道上行走,对轨道两侧的、相同或者不同高度的横向轨 道进行对接。为机器人在空中轨道上创造更佳机动灵活的工作环境,做好空中轨道交通基 础工作。
技术实现要素:
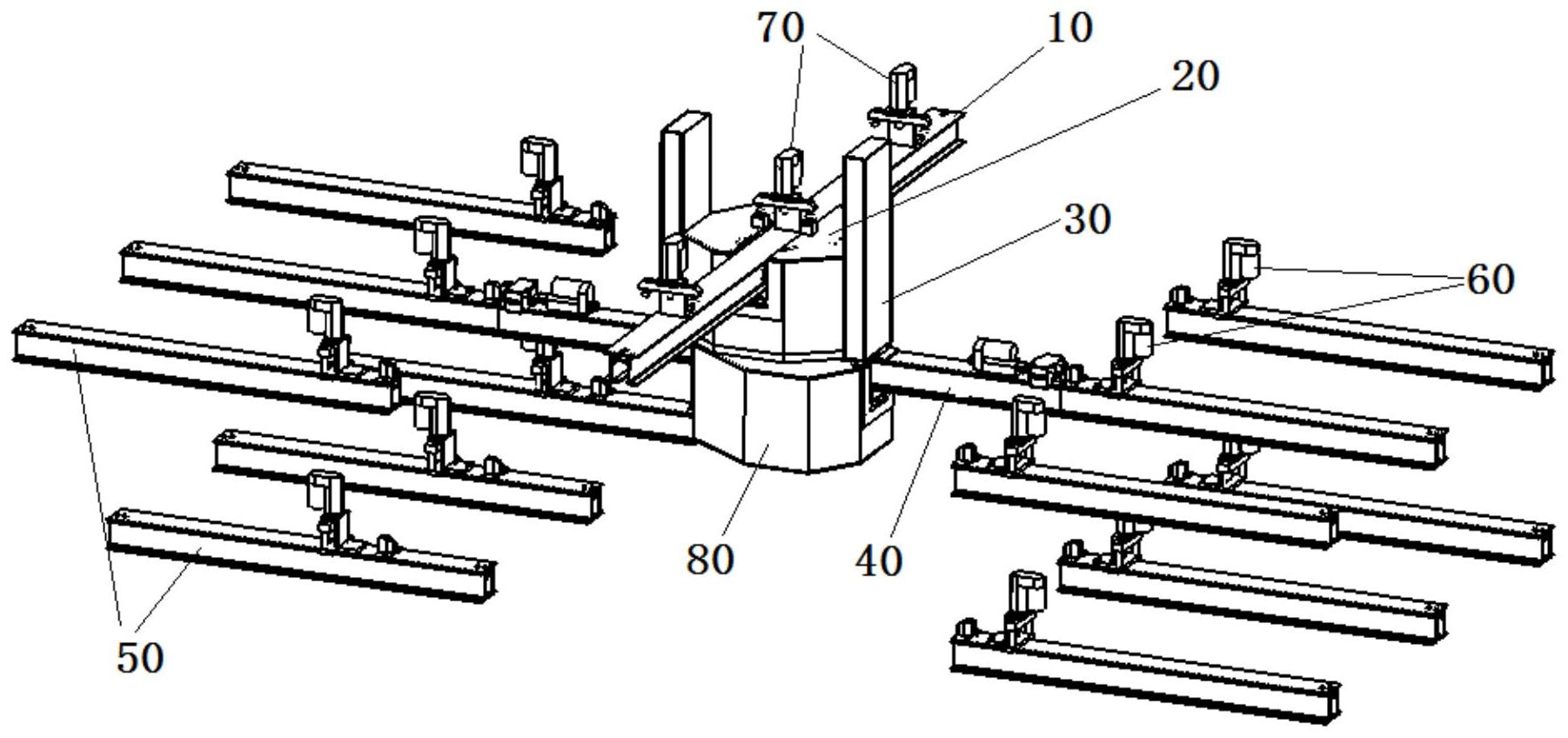
本发明提供一种多层多条空中轨道断轨式对接机构,包括纵向摆渡轨道、纵向行 走机构、升降总成和断轨对接总成,所述纵向行走机构可前后移动地设置在所述纵向摆渡 轨道上,所述升降总成设置在所述纵向行走机构上,所述断轨对接总成设置在所述升降总 成上。纵向行走机构沿着纵向摆渡轨道运送升降总成和断轨对接总成,可以跟不同高度的 横向轨道进行对接。 进一步地,所述升降总成包括分列在所述纵向行走机构两边的升降机构,所述升 降机构一部分固定在所述纵向行走机构上,另一部分可升降地与所述断轨对接总成连接。 进一步地,所述升降机构包括第一致动器、致动器连接板、导轨、导轨安装板、滑块 和滑块连接板,所述第一致动器固定在纵向行走机构上,第一致动器的活动杆的端部通过 致动器连接板与断轨对接总成固定连接;所述导轨通过导轨安装板连接在纵向行走机构 上,所述滑块滑动设置在所述导轨上,所述滑块连接板一端固定连接所述滑块,另一端与断 轨对接总成固定连接。 进一步地,所述断轨对接总成包括断轨、设置在断轨两端的定位锁紧机构和设置 在待对接横向轨道端部上的导向定位块,定位锁紧机构中的第二致动器通过推拉与之连接 的定位锁紧框,从而使得定位锁紧框与横向轨道上的导向定位块进行相互啮合或者相互脱 离。 4 CN 111591697 A 说 明 书 2/4 页 可选地,所述第二致动器为直线电机、液压缸或者气缸。 进一步地,还包括设置在横向轨道上的轨道拦阻装置,轨道拦阻装置包括第一直 线电机、第一电机支架、第一连接板、拦阻销和导向板,第一直线电机安装在Z型第一电机支 架的上部,第一直线电机的输出轴穿过Z型第一电机支架的支板后与第一连接板固定相连, 第一连接板连接两个阻拦销,每个阻拦销的下端穿入导向板的导向孔中。 进一步地,还包括设置在纵向摆渡轨道和纵向行走机构上的行走机构定位装置, 所述行走机构定位装置包括第二直线电机、第二电机支架、第二连接板、活动定位销和定位 块,所述第二直线电机安装在Z型第二电机支架的上部,第二直线电机的输出轴穿过Z型第 二电机支架的支板后与第二连接板固定相连,第二连接板连接两个活动定位销,每个活动 定位销与安装在纵向行走机构上部的定位块的定位孔对应。 本发明的有益效果:通过设置纵向摆渡轨道、升降总成和断轨对接总成,可以让轨 道机器人在多层次、多条固定的横向轨道之间进行快速切换,不再需要耗费巨大空间的弯 曲轨道,从而能够实现小空间区域内的轨道切换,让空中轨道和轨道机器人的应用场所更 加多样化;结构简单,制造和使用成本低。 附图说明 图1是本发明一种多层多条空中轨道断轨式对接机构的使用状态示意图。 图2是图1的局部放大图。 图3是本发明一种多层多条空中轨道断轨式对接机构一种实施例的结构示意图。 图4是图3中升降总成上部的局部放大示意图。 图5是图3中升降总成下部的局部放大示意图。 图6是本发明一种多层多条空中轨道断轨式对接机构一种实施例的断轨对接总成 与横向轨道对接的示意图。 图7是本发明一种多层多条空中轨道断轨式对接机构的轨道拦阻装置的结构示意 图。 图8是发明一种多层多条空中轨道断轨式对接机构的行走机构定位装置的结构示 意图。 其中,10-纵向摆渡轨道,20-纵向行走机构,30-升降总成,31-第一致动器,311-活 动杆,32-致动器连接板,33-导轨,34-导轨安装板,35-滑块,36-滑块连接板,40-断轨对接 总成,41-断轨,42-定位锁紧机构,421-第二致动器,422-对位锁紧框,43-导向定位块,50- 横向轨道,60-轨道拦阻装置,61-第一直线电机,62-第一电机支架,621-支板,63-第一连接 板,64-拦阻销,65-导向板,70-行走机构定位装置,71-第二直线电机,72-第二电机支架, 721-支板,73-第二连接板,74-活动定位销,75-定位块,751-定位孔,80-轨道机器人。











