
技术摘要:
本发明公开一种路面病害BIM参数化建模与增强现实移动巡检方法,涉及交通信息化和虚拟现实技术领域,以解决现有技术中存在的缺少典型病害快速可视化方法、发展预测困难的问题。所述路面病害BIM参数化建模与增强现实移动巡检方法包括:构建BIM初始描述模型,求解描述模型 全部
背景技术:
路面病害作为影响沥青道路服役性能的重要因素之一,包含龟裂、块裂、横向裂 缝、纵向裂缝、车辙、推移、坑槽、泛油、松散等多种类型,病害种类繁多,几何结构差异较大, 难以用简单的几何方法实现路面病害的快速三维重建。同时,受限于目前路面病害三维数 据的采集手段、采集精度和采集频次,典型病害的发展预测缺少数据支撑。 虽然不同领域研究人员围绕沥青路面典型病害的三维重建与发展预测展开了广 泛研究,并在几何重构、路面状况二维表达等方面取得了较好的成果,但仍存在一些亟待解 决的问题。(1)缺少路面典型病害的快速可视化方法,检测数据和简单的二维着色难以直 接、直观表达路面损坏程度,缺少具有一定采集数据准确和视觉真实感的路面病害三维模 型快速构建方法。(2)路面病害三维发展预测困难,缺少基于采样数据实现典型病害动态演 化和发展预测的有效方法,难以有效支持公路养护决策和养护反馈信息的施工回溯。
技术实现要素:
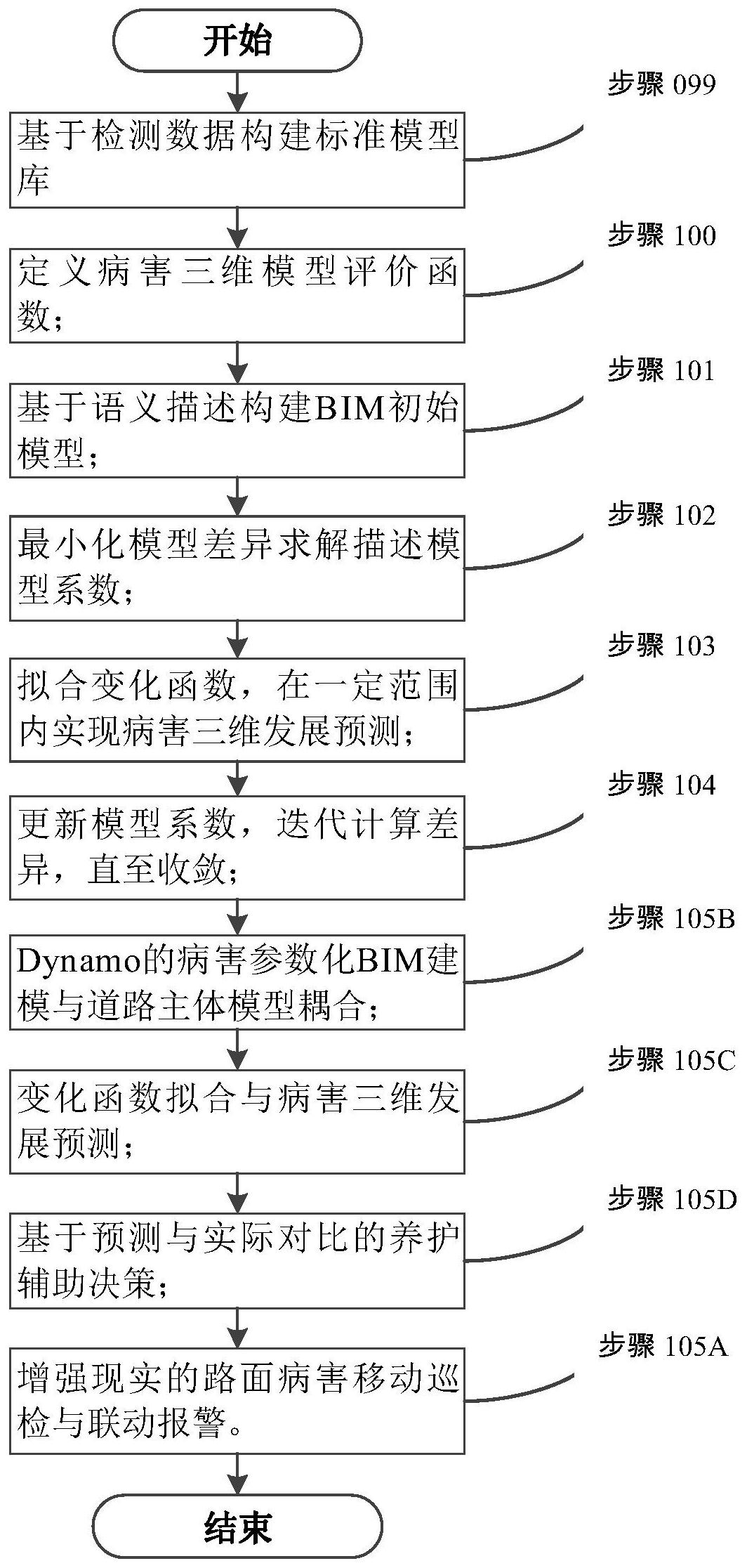
本发明的目的在于提供一种路面病害BIM参数化建模与增强现实移动巡检方法, 用于解决现有技术中存在的缺少典型病害快速可视化方法、发展预测困难的问题。 为了实现上述目的,本发明提供如下技术方案: 一种路面病害BIM参数化建模与增强现实移动巡检方法,包括以下步骤: 步骤101:基于路面典型病害的特征分析和语义描述,对路面病害信息进行数学描 述,构建典型病害BIM初始描述模型g0(k0x0,…,kixi…,knxn) ,n>i>0,其中,k0,…,ki...,kn 为描述模型系数,x0,...,xi...,xn为描述模型参数,n为描述函数所需的参数数量; 步骤102:利用评价函数对每类路面病害的BIM初始描述模型和路面病害标准三维 模型之间的差异性进行分析,获得路面病害的差异性;最小化所述路面病害的差异性,得到 描述模型系数 步骤103:返回步骤102,对描述模型系数 进行更新,获得优化的 路面病害描述模型;当路面病害的差异性小于差异阈值或迭代大于预设次数,算法收敛,得 到路面病害的最优数学描述模型goptimal(k0x0,…,kixi…,knxn); 步骤104:根据最优数学描述模型goptimal(k0x0,…,kixi…,knxn),利用Dynamo可视 化编程的方法获得典型病害的BIM参数化模型;并基于病害所在位置,将典型病害的BIM参 数化模型与道路主体BIM模型进行耦合,获得检测数据驱动的路面病害在每个时刻BIM参数 化模型; 步骤105A:获取移动终端设备发送的路面病害位置信息和采样数据,将病害模型 5 CN 111583413 A 说 明 书 2/11 页 实时标注到病害位置,获得前序病害与实际病害的增强现实直观对比;根据不同时刻的采 样数据差异,获得路面病害发展程度的快速研判结果;根据路面病害发展程度的快速研判 结果,获得路面病害发展程度的报警联动。 进一步的,在步骤104后,所述方法还包括: 步骤105B:选取同一病害两个相邻时间的检测数据,利用步骤103得到路面病害的 最优数学描述模型表达同一病害两个相邻时间点(t,t 1)上的模型:(x0 ,… ,xi ,… ,xn)t, (x0,…,xi,…,xn)(t 1),基于两者之间的参数差异,结合路面病害物理属性和材料衰减变化 模型分析,实现路面病害三维动态演化模拟;或, 在步骤104后,所述方法还包括: 步骤105C:根据同一病害至少3个相邻时间((t-1) ,t,(t 1) ,…)的检测数据,得到 同一病害在时间序列上的最优数学描述模型;结合路面病害物理属性和材料衰减变化模型 分析结果,对同一病害在时间序列上的最优数学描述模型参数在时间序列上的变化函数ht (x0,…,xi,…,xn)拟合,获得一定范围内的病害三维发展预测。 进一步的,所述步骤105B包括: 步骤105B1:根据同一病害两个相邻时间的检测数据,得到同一病害两个相邻时间 点(t,t 1)上的最优数学描述模型:(x0,…,xi,…,xn)t,(x0,…,xi,…,xn)(t 1); 步骤105B2:结合路面病害物理属性和材料衰减变化模型分析结果,根据同一病害 两个相邻时间点(t,t 1)上的数学描述模型之间的参数差异,获得路面病害三维动态演化 模拟;或, 所述步骤105C包括: 步骤105C1:针对每类典型病害,选取同一病害至少3个相邻时间((t 1) ,t ,(t 1) ,…)的检测数据与标准模型; 步骤105C2:利用步骤103的优化模型得到同一病害在时间序列(t-1) ,t,(t 1) ,… 上的病害描述模型参数(x0,…,xi,…,xn)(t-1),(x0,…,xi,…,xn)t,(x0,…,xi,…,xn)(t 1) ,…; 步骤105C3:结合路面病害物理属性和材料衰减变化模型分析,拟合同一病害在时 间序列上的病害描述模型参数(x0,…,xi,…,xn)在时间序列上的变化函数ht(x0,…,xi,…, xn); 步骤105C4:基于拟合得到的变化函数,向外插值得到下一个时间间隔的参数值 (x0,…,xi,…,xn)(t 2),在一定范围内实现路面典型病害的三维发展预测。 进一步的,在步骤104后,所述方法还包括: 步骤105D:将步骤105C的预测结果与实际检测数据对比,结合路面病害物理属性 和材料衰减变化模型分析,获得道路养护的辅助决策建议。 进一步的,所述步骤105D包括: 步骤105D1:对步骤105C在时间序列(t-1) ,t,(t 1) ,…病害模型预测得到的(t 2) 时刻的路面病害预测结果与实际(t 2)时刻检测得到的病害检测结果进行数据对比,得到 的预测结果与实际检测结果的参数差异; 步骤105D2:结合路面病害物理属性和材料衰减变化模型分析结果,根据预测结果 与实际检测结果的参数差异,获得道路养护的辅助决策建议; 步骤105D3:确定实际检测得到病害检测结果变化大于病害模型预测得到的预测 6 CN 111583413 A 说 明 书 3/11 页 变化,根据预测结果与实际检测结果的参数差异,得到相应的预养护或小修处理。 进一步的,所述步骤101包括: 步骤101A:针对每种路面典型病害,切分出基本几何元素; 步骤101B:对于规则形状,可以将基本几何元素降维或转换到其他域进行特征分 析; 步骤101C:根据基本几何元素的数学表达函数,获得典型病害初始描述模型g0 (k0x0,…,kixi…,knxn) ,n>i>0,其中,k0,…,ki…,kn为描述模型系数,x0,…,xi…,xn为描述 模型参数,n为描述函数所需的参数数量; 步骤101D:对基于绘制位置和病害基本元素的一般病害联合表达方式和病害连续 表达规则进行分析; 步骤101E:结合病害模型表达与绘制的关系,对绘制所需的基本参数与检测数据 进行关系分析和关系映射计算,获得检测数据驱动的病害模型快速绘制方法的数据和方 法。 进一步的,所述步骤103包括: 步骤103A:对描述模型系数 进行更新,获得优 化后的模型;将优化后的模型作为当前描述模型gj(k0x0,…,kixi…,knxn); 步骤103B:根据优化后的模型获得更新后的fevaluation(gj,gstandard),判断是否当前 模型与标准模型的差异小于一定的阈值ε或迭代超过一定次数j>N, 步骤103C:如果为“否”,继续执行步骤102描述模型的系数计算,然后回到步骤 103A; 步骤103D:如果为“是”,算法收敛,输出描述此类病害的最优数学描述模型goptimal (k0x0,…,kixi…,knxn)。 进一步的,所述步骤104包括: 步骤104A:结合基本几何元素表达一般病害的限定条件,利用建模工具Dynamo根 据优化后的数学描述模型goptimal(k0x0,…,kixi…,knxn)构建典型病害的BIM参数化模型; 步骤104B:将构建得到的病害模型,标定到公路主体BIM模型的对应位置,基于检 测点位置与道路主体BIM模型进行三维几何模型的耦合,实现检测数据驱动的路面病害BIM 参数化建模。 进一步的,所述步骤105A包括: 步骤105A1:利用终端设备进行病害位置识别,结合GPS定位、手机定位和图像匹配 等技术,将上一次检测数据重建得到的路面病害模型标注到当前病害位置,实现前序病害 与实际病害的增强现实直观对比; 步骤105A2:根据移动终端采集并上传的当前病害关键图像和数据,将前序三维病 害模型的关键参数和预测发展结果与当前实际病害的关键采样数据进行快速对比,获得前 序、当前、预测采样数据的对比差异; 步骤105A3:根据前序、当前、预测采样数据的对比差异,获得路面病害发展程度快 速研判结果; 步骤105A4:根据路面病害发展程度快速研判结果,获得相应的采集、报警与其他 联动操作,实现路面病害的增强现实移动巡检。 7 CN 111583413 A 说 明 书 4/11 页 进一步的,所述描述模型系数的表达式为: 和/或, 所述病害三维模型评价函数fevaluation为: fevaluation=α1|Dgeometric| α2|Dphysical| α3|Dmaterial| fevaluation用于度量重建的三维病害模型与真实病害之间的差异;Dgeometric为重建 的三维病害模型与真实病害之间的几何特征差异;Dphysical为重建模型与真实病害之间的物 理变化特征差异;Dmaterial为重建模型与真实病害之间的主要材料衰减特征差异;α1为第一 差异权重,α2为第二差异权重,α3为第三差异权重,α1,α2,α3均大于或等于0。 与现有技术相比,本发明提供的路面病害BIM参数化建模与增强现实移动巡检方 法具有如下有益效果: (1)突破路面典型病害的BIM参数化建模方法,实现不同路面病害的三维快速可视 化。BIM的数字化、参数化、可视化特性为路面病害的直观表达和养护辅助决策带来了天然 的优势,目前,国内外基于BIM的路面病害建模与应用研究仍处于空白状态。本发明突破路 面典型病害的BIM参数化建模方法,实现不同路面病害模型的快速可视化,形成典型病害的 BIM全参数化模型库,在交通行业具有较好示范和推广价值。 (2)形成数据驱动的路面病害三维动态演化与发展预测,为道路养护提供直观模 型与分析工具。基于语义描述的BIM建模和基于检测数据的三维重构方法在对某一状态的 路面病害构建时具有优势,但因为缺少连续变化规则和物理演化模型的支撑,难以对病害 的三维动态变化和发展状况进行有效模拟和预测。本发明基于BIM的参数化特性,结合动态 演化物理模型、路面服役性能衰变模型、概率统计模型等,突破检测数据驱动的路面病害三 维动态演化模拟,并基于历年检测数据变化特征分析,实现路面检测数据驱动典型病害的 三维发展预测,为道路养护提供直观模型与分析工具。 (3)形成增强现实的路面病害移动巡检方法,实现路面病害的快速研判与联动报 警。利用手机或增强现实眼镜,将路面病害的前序模型、关键参数、发展预测结果增强到当 前病害位置,实现增强现实的移动巡检,通过前序、当前和预测关键参数的对比实现病害发 展状况的快速研判,并触发相应的报警或其他操作,实现沥青路面病害的增强现实快速移 动巡检。 附图说明 此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发 明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中: 图1为本发明实施例中路面病害BIM参数化建模与增强现实移动巡检方法的技术 路线示意图; 图2为本发明实施例中路面病害BIM参数化建模与增强现实移动巡检方法的流程 框图; 图3为本发明实施例中获得路面病害的最优数学描述模型的流程框图。 8 CN 111583413 A 说 明 书 5/11 页











