
技术摘要:
本发明公开了一种工业机器人用夹持装置及夹持方法,包括本体,所述本体为圆形块,所述本体下端中间位置同轴设有尖端朝下的引导椎体,所述本体上下端面阵列分布有若干个滑动槽,所述滑动槽中滑动配合有滑动件,所述滑动件上端垂直设有上固定杆,所述上固定杆连接用于带 全部
背景技术:
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执 行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可 以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领 行动,工业机器人在加工过程中需要用到夹持装置,现有的夹持装置不方便调节,如夹持范 围和夹持力度不方便调节。 针对上述问题,现有专利公告号为CN209036552U的专利提出一种工业机器人用夹 持装置,该装置通过设置的弧形金属条和矩形套,方便调节弧形金属条的伸长长度,方便调 节夹持范围,操作简单,配合设置的弧形托块,结合杆式压力变送器和接近传感器,提升装 置的自动化程度,方便检查夹持力度,但是该装置在对夹持物体时仍然需要对物体进行预 先定位,否则该装置仍然无法对物体进行夹取。 针对现有装置存在的问题,现在提供一种无须对传输的工件进行精确定位,却可 以对该工件进行夹持的夹持装置。
技术实现要素:
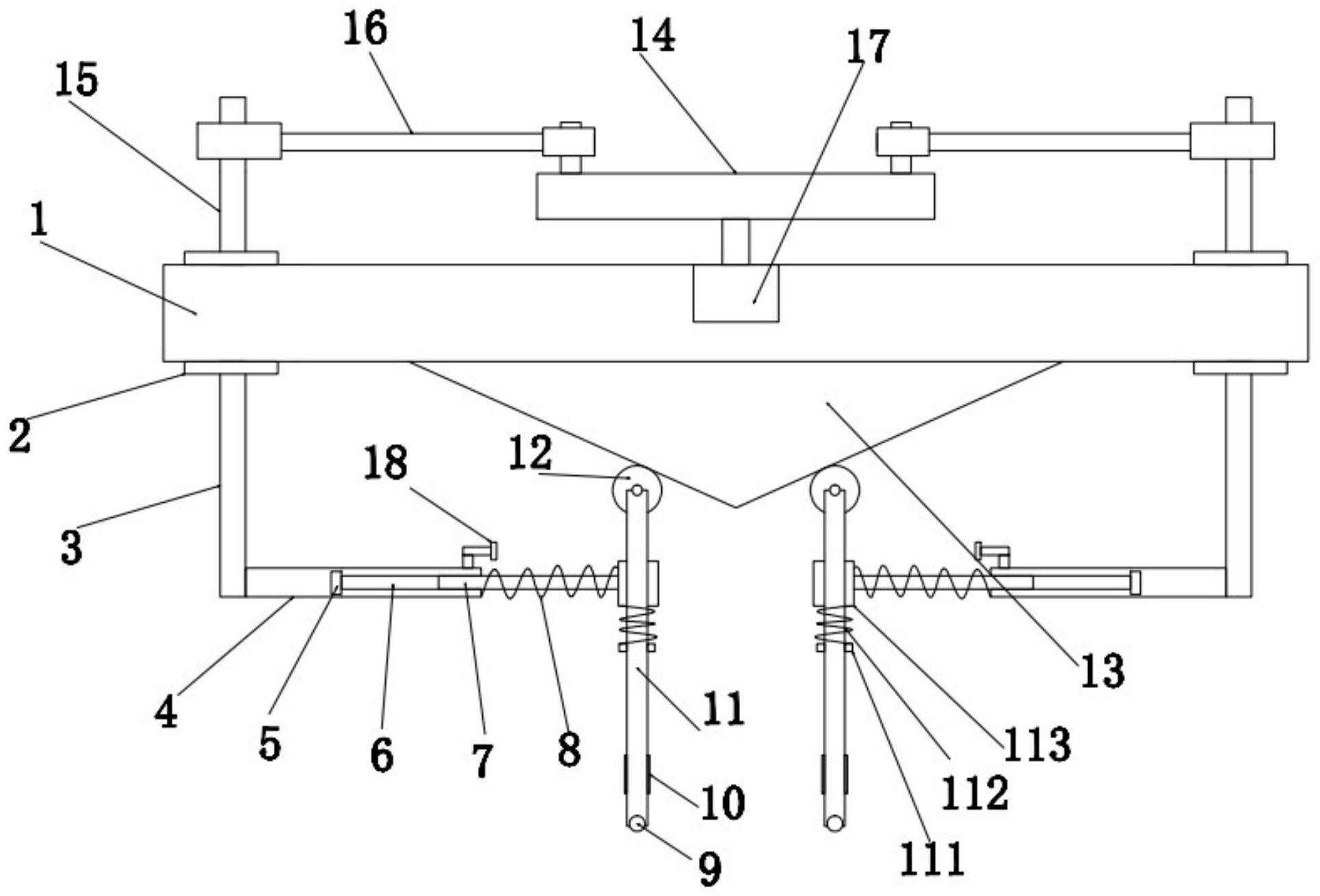
本发明的目的在于提供一种工业机器人用夹持装置及夹持方法,以解决上述背景 技术中提出的问题。 为实现上述目的,本发明提供如下技术方案: 一种工业机器人用夹持装置,包括本体,所述本体为圆形块,所述本体下端中间位置同 轴设有尖端朝下的引导椎体,所述本体上下端面阵列分布有若干个滑动槽,所述滑动槽中 滑动配合有滑动件,所述滑动件上端垂直设有上固定杆,所述上固定杆连接用于带动其沿 着滑动槽滑动的驱动组件,所述滑动件下端设有下固定杆; 所述下固定杆下端外侧设有朝向本体轴线布置的侧杆,每个侧杆内端都设有滑动孔以 及滑动配合在滑动孔中的滑动杆,所述滑动杆和滑动孔之间设有用于限制二者相对转动的 限位组件,所述滑动杆端部设有纵向滑动套,所述纵向滑动套与侧杆之间通过水平复位弹 簧连接固定,所述纵向滑动套中滑动配合有顶部与引导椎体相抵的夹持杆,所述夹持杆左 右两侧设有固定块,所述固定块与纵向滑动套之间通过纵向复位弹簧连接,在纵向复位弹 簧的作用下,夹持杆顶部与引导椎体斜面相抵,所述夹持杆下端设有转动腔以及转动配合 在其中的滚珠; 4 CN 111590612 A 说 明 书 2/5 页 所述侧杆内端设有用于紧压夹持杆上端以限定夹持杆沿着纵向滑动套上下滑动的摩 擦限位块。 作为本发明进一步的方案:所述摩擦限位块和夹持杆上都设有相对应的防滑凸 起。 作为本发明进一步的方案:所述限位组件包括设置在滑动杆外侧的限位凸起和设 置在滑动孔内壁的限位凹槽。 作为本发明进一步的方案:所述驱动组件包括设置在本体上端中间位置的驱动电 机,所述驱动电机的输出端设有与本体同轴设置的转动盘,所述转动盘上端外侧阵列分布 有若干个驱动杆,所述驱动杆上转动连接传动杆的一端,所述传动杆另一端与上固定杆转 动连接,所述传动杆两端与上固定杆以及驱动杆之间都通过固定轴承转动连接。 作为本发明进一步的方案:所述滑动件包括与滑动槽滑动配合的连接板以及设置 在连接板上端与本体上端面滑动接触的上滑动板,所述连接板下端设有与本体下端面滑动 接触的下滑动板。 作为本发明进一步的方案:所述下滑动板和上滑动板两侧都设与本体表面相抵的 滚轮。 作为本发明进一步的方案:所述夹持杆上端通过固定轴转动设有与引导椎体相抵 的引导轮。 作为本发明进一步的方案:所述夹持杆靠近滚珠的杆身表面设有防滑层,所述防 滑层下端与杆身连接处为锥形结构。 一种工业机器人用夹持装置的夹持方法:包括以下步骤: 步骤1:将装置放置在物体上方,然后通过进给机构使得装置向下运动,使得夹持杆下 端的滚珠与物体表面相抵,然后持续使得整个装置下移,此时物体会对夹持杆产生一个反 作用力,在该力的作用下,夹持杆顶部会沿着引导椎体向四周滑动,此时所有的夹持杆则会 沿着引导椎体轴线向四周辐射散开,进而扩大夹持杆的夹持范围,随着整个装置持续下降, 直到夹持杆下端会全部移到物体外侧; 步骤2:通过驱动组件带动滑动件向中间聚拢,此时,下固定杆会带动侧杆向中间聚拢, 进而通过水平复位弹簧对夹持杆产生一个推力,使得多个夹持杆产生一个将物体包裹的 力,直到侧杆上的摩擦限位块紧压夹持杆上端,从而完成对物体的夹持。 与现有技术相比,本发明的有益效果是:本发明针对现有装置的弊端进行改进,设 计了一种可以自动寻找夹持边界的夹持装置,无需对所要夹持的物体进行预先位置设置, 从而消除了预定位置部件的设置降低了成本,简化了夹持设备,实用性强。 附图说明 图1为本发明的结构示意图。 图2为本发明的结构俯视图。 图3为本发明中滑动件的结构示意图。 图4为本发明所夹持规则物体结构示意图。 图5为本发明所夹持不规则物体的结构示意图 其中:本体1、滑动件2、下固定杆3、侧杆4、压力传感器5、滑动孔6、滑动杆7、水平复位弹 5 CN 111590612 A 说 明 书 3/5 页 簧8、滚珠9、防滑层10、夹持杆11、引导轮12、引导锥体13、转动盘14、上固定杆15、传动杆16、 驱动电机17、摩擦限位块18、纵向滑动套113、纵向复位弹簧112、固定块111、滑动槽101、上 滑动板21、连接板22、下滑动板23。











