
技术摘要:
本发明公开一种基于定常射流的水下滑翔机开环主动流动控制装置,涉及主动流动控制领域,包括设置于水下滑翔机机翼下方后端的微型喷水泵组,所述微型喷水泵组连通有储水仓,所述储水仓底部连通有微型潜水泵,所述微型潜水泵和所述微型喷水泵组分别与控制单元连接;所述 全部
背景技术:
水下滑翔机(UnderwaterGlider,UG)是一种利用净浮力和姿态角调节获得推进力 的新型水下航行器。相比于传统水下航行器,水下滑翔机具有航程远、持续工作能力强和经 济性好等优点。水下滑翔机作为一种水下无人智能移动平台,在探索海洋资源、海洋科学考 察和军事等领域有着广阔的应用前景和巨大的潜在价值。水下滑翔机按照外形可分为传统 回转体式和翼身融合式两类。由于回转体壳体外形不能像水翼一样提供非常高的升力,所 以传统回转体式滑翔机在加装高展弦比水翼下的最大升阻比也只能达到5左右。而翼身融 合式水下滑翔机由于具有更大的水翼面积能显著提高升阻比。 水下滑翔机滑翔比是决定其航程和经济性的关键因素之一,而滑翔比主要取决于 水下滑翔机的升阻比。因而,升阻比对滑翔机航程和经济性至关重要。目前,翼身融合水下 滑翔机通过外形优化设计升阻比可达15~20,然而不管外形怎么优化,在航行过程中由于 流动分离现象的存在,导致阻力系数增加和升力系数减小,限制其升阻比的进一步提升。而 且,仅依靠外形优化来提升水下滑翔机的升阻比会使得滑翔机内部空间狭窄,削弱其探测 能力或者工作时间。
技术实现要素:
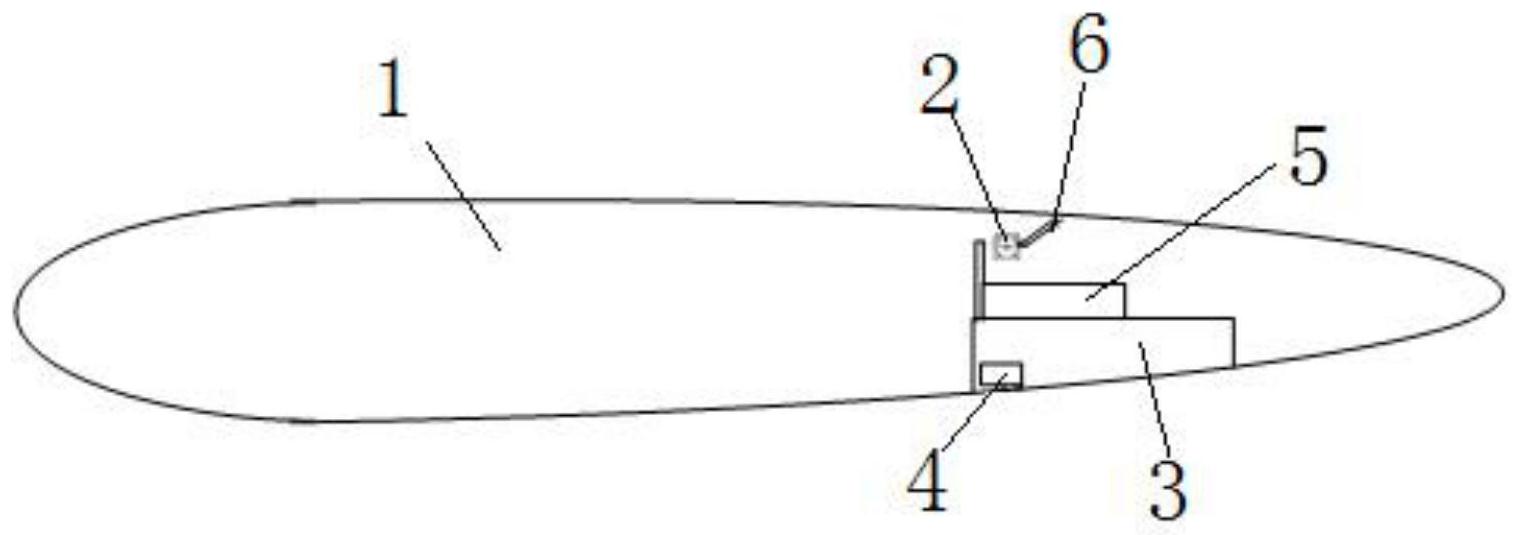
本发明的目的是提供一种基于定常射流的水下滑翔机开环主动流动控制装置,以 解决上述现有技术存在的问题,通过微型喷水泵组实现定常射流形式的局部扰动,进而完 成主动流动控制。 为实现上述目的,本发明提供了如下方案: 本发明提供一种基于定常射流的水下滑翔机开环主动流动控制装置,包括设置于 水下滑翔机机翼内部后端的微型喷水泵组,所述微型喷水泵组连通有储水仓,所述储水仓 底部连通有微型潜水泵,所述微型潜水泵和所述微型喷水泵组分别与控制单元连接;所述 微型喷水泵组连接有固定喷口,所述固定喷口端部与定常射流开口连通,所述定常射流开 口开设于所述水下滑翔机机翼上表面的后端。 可选的,所述定常射流开口处速度为: Ujet=Ublowingdjet Ublowing表示为固定喷口处速度值,djet为射流出射方向的单位矢量,并定义djet与 水下滑翔机机翼的翼型当地表面切向的夹角θjet为射流偏角。 可选的,所述定常射流开口处的射流速度Ublowing相对于水下来流速度U∞的射流速 度比为: 3 CN 111572704 A 说 明 书 2/3 页 所述微型喷水泵组的固定喷口处速度比为Rjet=1.429。 可选的,所述水下滑翔机机翼切面的长度为c,所述固定喷口位置为xjet=70%× c;所述固定喷口相对于切面长度方向的角度为θjet=30°。 本发明相对于现有技术取得了以下技术效果: 本发明通过定常射流技术对翼身融合水下滑翔机进行主动流动控制。在物体流场 中通过定常射流施加扰动并与流动的内在模式相耦合来实现对流动的控制。通过局部扰 动,获得局部或全局的有效流动改变,进而实现增升减阻、改善流场、抑制噪声等目的。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1为本发明水下滑翔机机翼局部切面示意图; 图2为为图1中角度和尺寸标注示意图; 图3为本发明水下滑翔机机翼俯视结构示意图; 其中,1为水下滑翔机机翼、2为微型喷水泵组、3为储水仓、4为微型潜水泵、5为控 制单元、6为固定喷口、7为定常射流开口。











