
技术摘要:
本发明公开了一种无刷直流电机的控制方法,无刷直流电机的控制方法依次通过变频强拖和定频运转两个阶段就能完成无霍尔传感器的无刷直流电机的启动过程,无刷直流电机只需调节其单个参数中的换相频率对无刷直流电机转子的初始位置进行有效定位,如此即可实现无刷直流电 全部
背景技术:
无刷直流电机静止时的转子位置是随机的,要顺利启动电机必须先确定转子位 置,对于无霍尔传感器的无刷直流电机因为没有感知转子位置的传感器,故确定转子初始 位置困难。相关技术中,大多数无霍尔传感器的无刷直流电机启动的方法为: 1、利用电感饱和效应来估算转子初始位置,即向定子电枢绕组注入一系列脉冲电 压矢量,寻找使电流响应幅度最大的电压矢量并逐步细分逼近至转子位置,但该方法需用 到检测电流响应的高精度传感器且算法比较复杂,增加了系统成本和复杂性; 2、在定子电枢绕组中施加幅值和频率都逐渐增大的旋转电压矢量,并通过二次定 位算法来定位转子位置,但该方法引入幅值和频率的矢量调节,需要精确的数学模型作理 论支撑,如果数学模型不够精确会影响到电机启动时发生转速或扭矩的震荡。显然上述方 法都需要复杂的算法支持,必要时还需要经过多次软件仿真验证,加大了开发难度。 因此对于无霍尔传感器的无刷直流电机来说,如何准确的确定转子的位置就显得 尤为重要。
技术实现要素:
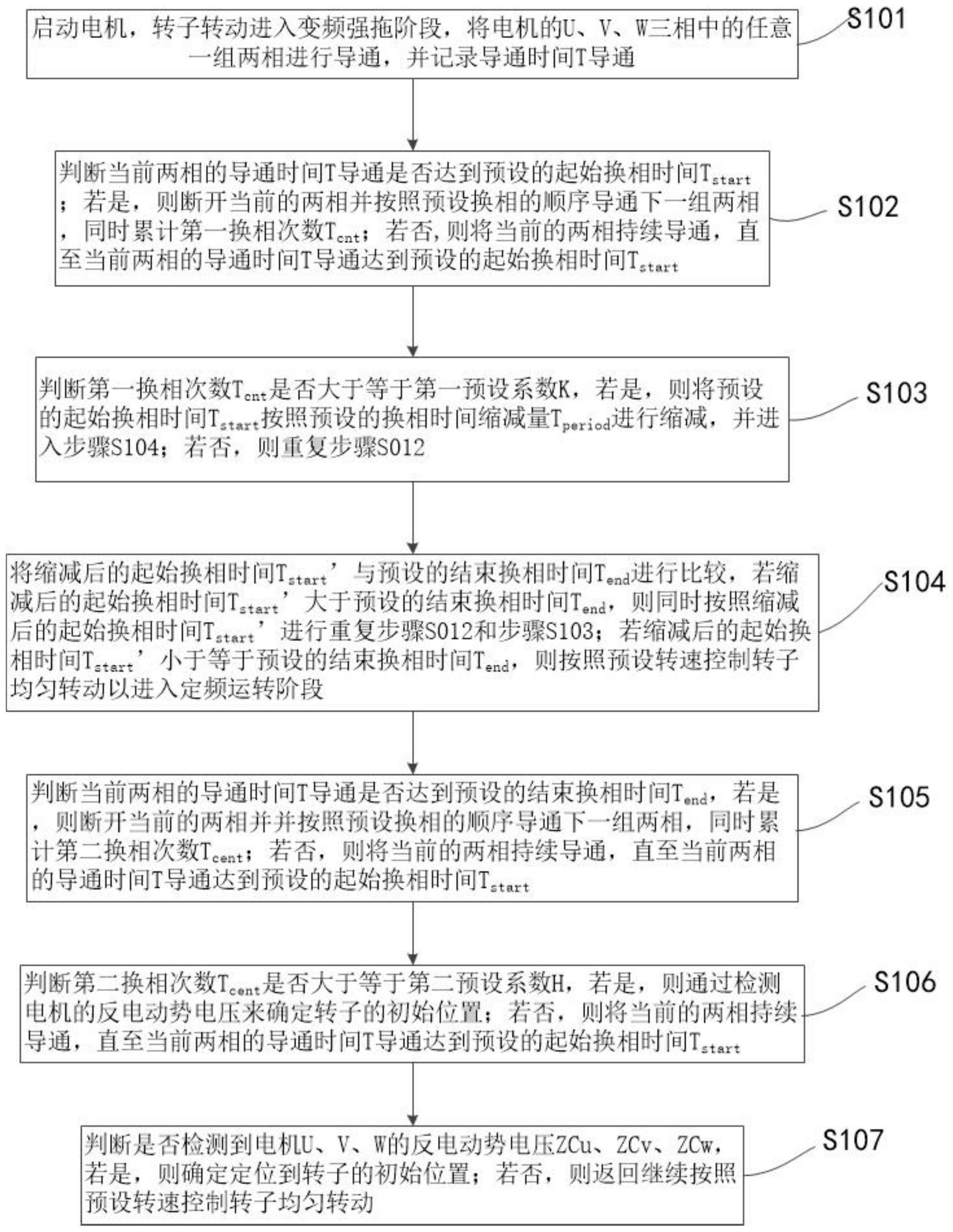
本发明旨在至少在一定程度上解决现有相关技术中存在的问题之一,为此,本发 明提出一种无刷直流电机的控制方法,其方法简单可行,通过反电动势来确定转子的位置, 从而进一步提高了转子位置检测的精准性。 上述第一个目的是通过如下技术方案来实现的: 一种无刷直流电机的控制方法,所述无刷直流电机的控制方法包括如下步骤: 步骤S101:启动电机,转子转动进入变频强拖阶段,将所述电机的U、V、W三相中的 任意一组两相进行导通,并记录导通时间T导通; 步骤S102:判断当前两相的所述导通时间T导通是否达到预设的起始换相时间Tstart; 若是,则断开当前的两相并按照预设换相的顺序导通下一组两相,同时累计第一换相次数 Tcnt;若否,则将当前的两相持续导通,直至当前两相的所述导通时间T导通达到预设的起始换 相时间Tstart; 步骤S103:判断所述第一换相次数Tcnt是否大于等于第一预设系数K,若是,则将所 述预设的起始换相时间Tstart按照预设的换相时间缩减量Tperiod进行缩减,并进入步骤S104; 若否,则重复步骤S012; 步骤S104:将缩减后的所述起始换相时间Tstart’与预设的结束换相时间Tend进行比 较,若缩减后的所述起始换相时间Tstart’大于所述预设的结束换相时间Tend,则同时按照缩 减后的所述起始换相时间Tstart’进行重复步骤S012和步骤S103;若缩减后的所述起始换相 时间Tstart’小于等于所述预设的结束换相时间Tend,则按照预设转速控制转子均匀转动以进 4 CN 111585482 A 说 明 书 2/6 页 入定频运转阶段。 在一些实施方式中,所述起始换相时间Tstart的设定方法为:Tstart=60000/Smin/2/ (360/θ),Tend的设定方法为:Tend=60000/(Smax*P)/(360/θ),其中,所述Smin为电机最小转 速,θ为电角度,Smax为电机最大转速,P为PWM占空比。 在一些实施方式中,所述P值取值范围为5%-20%。 在一些实施方式中,所述缩减后的起始换相时间通过如下计算公式进行计算得 到: Tstart’=Tstart-Tperiod×Tcnt,其中所述Tstart’为缩减后的起始换相时间,所述Tstart 为预设的起始换相时间,所述Tperiod为预设的换相时间缩减量,Tcnt为第一换相次数。 在一些实施方式中,按照预设转速控制转子均匀转动以进入定频运转阶段后的步 骤包括: 判断当前两相的所述导通时间T导通是否达到所述预设的结束换相时间Tend,若 是,则断开当前的两相并并按照所述预设换相的顺序导通下一组两相,同时累计第二换相 次数Tcent;若否,则将当前的两相持续导通,直至当前两相的所述导通时间T导通达到所述预 设的起始换相时间Tstart; 判断第二换相次数Tcent是否大于等于第二预设系数H,若是,则通过检测所述电机 的反电动势电压来确定转子的初始位置;若否,则将当前的两相持续导通,直至当前两相的 所述导通时间T导通达到所述预设的起始换相时间Tstart。 在一些实施方式中,判断是否检测到所述电机U、V、W的反电动势电压ZCu、ZCv、 ZCw,若是,则确定定位到转子的初始位置;若否,则返回继续按照预设转速控制转子均匀转 动。 在一些实施方式中,还包括切闭环阶段,在该阶段中,根据检测到的所述转子位置 动态调整PWM占空比和换相频率以将所述电机的转速提升至预设目标转速。 在一些实施方式中,还包括步骤速度环控制阶段,在该阶段中,根据设定的目标转 速和检测到的所述转子位置实现闭环控制,通过动态调整PWM占空比和换相频率以实现所 述电机按照所述预设目标转速匀速转动。 在一些实施方式中,所述预设换相的顺序依次为UW、UV、WV、WU、VU、VW。 与现有技术相比,本发明的至少包括以下有益效果: 1 .本发明无刷直流电机的控制方法,其方法简单可行,通过反电动势来确定转子 的位置,从而进一步提高了转子位置检测的精准性。 2.其可有效降低无刷直流电机的系统成本,以及还简化了其启动控制的复杂性。 附图说明 图1是本发明实施例中无刷直流电机的控制方法的流程示意图; 图2是本发明实施例中无刷直流电机启动阶段的示意图; 图3是本发明实施例中无刷直流电机的结构示意图; 图4是本发明实施例中不同PWM占空比与转速之间的示意图; 图5是本发明实施例中变频强拖阶段反电动势的第一波形图; 图6是本发明实施例中变频强拖阶段反电动势的第二波形图; 5 CN 111585482 A 说 明 书 3/6 页 图7是本发明实施例中定频运转阶段中反电动势的波形图。











