
技术摘要:
本发明涉及摊铺机、特别是滑模摊铺机,其具有由前底架(2)和后底架(3)支撑的机器框架(1)和用于摊铺物料的摊铺装置(6)。本发明还涉及操作摊铺机的方法。摊铺机设置有铺面监测装置(13),其配置为生成高度轮廓数据或信号,描述在横向于工作方向(X)的方向上沉积在摊铺装置(6 全部
背景技术:
摊铺机用于摊铺未粘结的和粘结的层,诸如沥青或混凝土。配备有滑模的滑模摊 铺机用于摊铺混凝土表面。 已知的滑模摊铺机允许特别经济的混凝土摊铺。待摊铺的混凝土直接沉积在滑模 摊铺机的前方,或经由传送带从侧面传送到摊铺机。滑模摊铺机可以配备有散布装置,诸如 散布犁或散布螺旋钻,以在整个摊铺宽度上均匀地散布混凝土。在散布后,利用电动或液压 振动器将混凝土均匀压实。然后,滑模在向前行进期间将混凝土表面模制成限定的宽度和 厚度。 滑模摊铺机例如在DE 10 2011 101 944A1、DE 10 2006 010 793A1和WO 2012/ 155904A2中公开。 实际上,在横跨摊铺机的工作方向上均匀分配足够量的用于摊铺的物料(诸如混 凝土)存在问题。通常,物料是使用挖掘机从摊铺机的前方侧卸载,或者由货车运输并在摊 铺机前方沿工作方向倾倒。不可避免地会形成个别的积聚形式,因此物料必须在整个工作 宽度上均匀分布。尽管滑模摊铺机的散布犁可以均匀地散布物料,但目的是以尽可能均匀 的散布来将物料横向于工作方向沉积在摊铺机前方。然而,这在实践中不是可以容易地实 现的,因为该区域特别对于挖掘机的机械操作人员并且对于货车的驾驶员而言是不可见的 或仅具有较差的可见性。此外,必须始终有足够体积的物料。
技术实现要素:
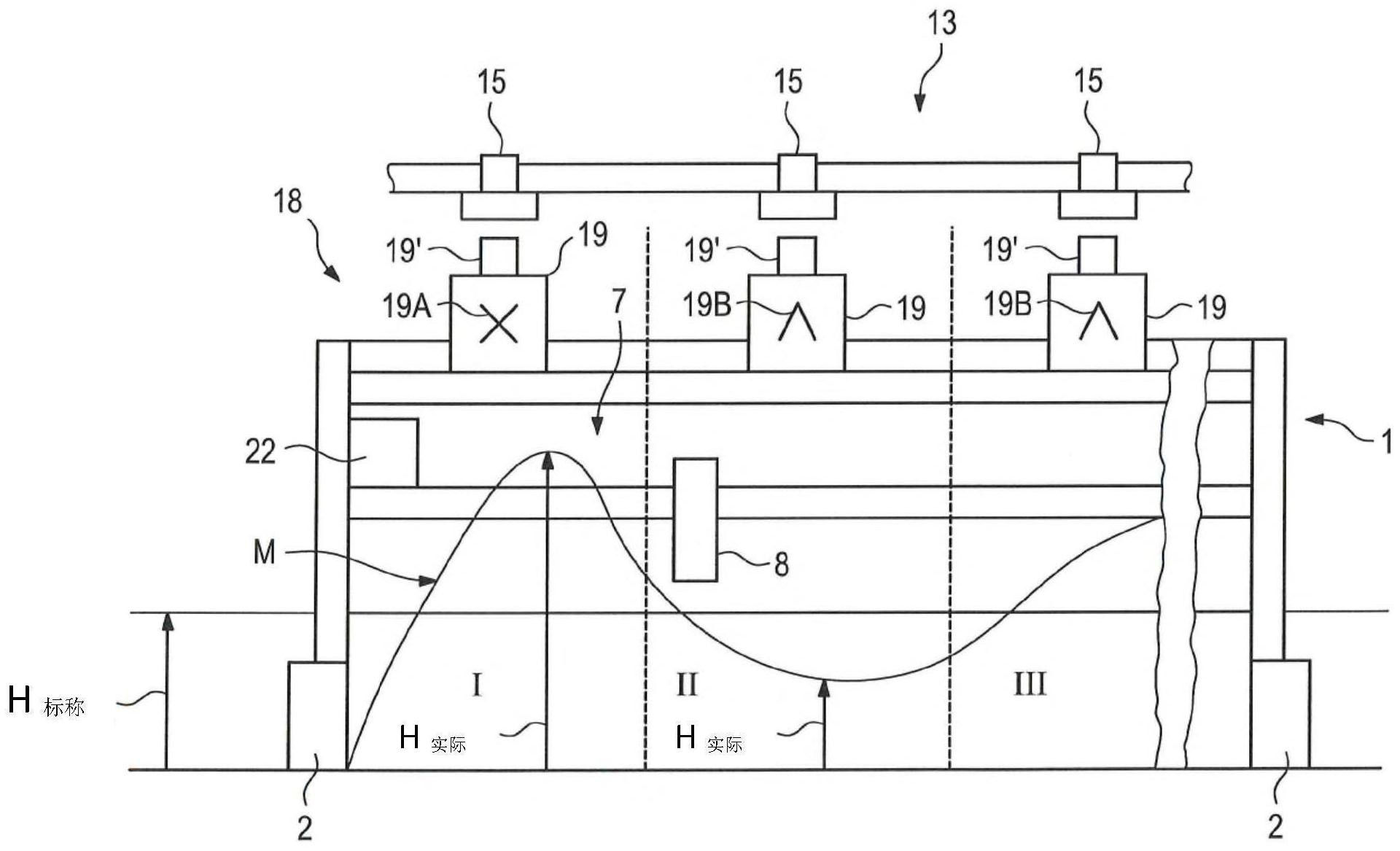
本发明的目的是创造一种摊铺机,该摊铺机简化摊铺过程,并且特别是便于待摊 铺的物料的进料。本发明的另一个目的是改善将摊铺在整个工作宽度上的物料的散布。 根据本发明,这些目的通过独立权利要求的特征来实现。从属权利要求的主题涉 及本发明的有利实施例。 根据本发明的摊铺机,特别是滑模摊铺机,具有铺面(apron)监测装置,该铺面监 测装置构造为生成高度(elevation)轮廓数据或高度轮廓信号,该高度轮廓数据或高度轮 廓信号描述在横向于工作方向的方向上沉积在摊铺装置铺面中的物料的高度轮廓。另外, 摊铺机具有接收高度轮廓数据或高度轮廓信号的数据或信号处理装置,该数据或信号处理 装置使得可以处理高度轮廓数据或高度轮廓信号。 在这种情况下,数据或信号是通过测量获得的描述高度轮廓的所有信息项。高度 轮廓数据或高度轮廓信号可以是可用于进一步评估的模拟或数字测量值。 数据或信号处理装置是允许处理通过铺面监测装置获得的数据或信号(测量值) 的装置。数据或信号处理装置可包括模拟或数字电路,并且可以是摊铺机的独立装置或中 5 CN 111608054 A 说 明 书 2/9 页 央计算和控制装置的一部分。例如,数据或信号处理装置可以具有通用处理器、用于连续编 辑数字信号的数字信号处理器(DSP)、微处理器、专用集成电路(ASIC)、由逻辑构件(FPGA) 构成的集成电路或其他集成电路(IC)、或硬件部件。可以在硬件部件上运行数据处理程序 (软件)。各种部件的组合也是可能的。 高度轮廓描述物料在横向于工作方向的方向上的散布。在这种情况下,高度分布 不仅可以理解为通过在横向于工作方向运行的摊铺装置的铺面中物料的一个或多个积聚 物的垂直截面,即,物料积聚物的横向扩张(宽度),而且高度轮廓数据或高度轮廓信号也可 以描述物料在工作方向上的散布。因此,高度轮廓数据或高度轮廓信号可以描述沿横向线 或条的积聚物的图像,或者积聚物的全部体积或部分体积。 可以关于摊铺机上的参考点、特别是相对于混凝土槽的顶部边缘来确定高度轮 廓。为了确定相对于参考点的高度轮廓,可以将铺面监测装置或其监测高度轮廓的传感器 系统在限定的位置附接到机器框架。可替代地,可以相对于基底来确定高度轮廓。为此目 的,可能需要获知摊铺机的机器配置和相对于基底的取向,特别是升降柱的位置或来自调 平系统的信息。这些数据通常在机器控制器中可获得。确定相对于基底的高度轮廓具有的 优点在于,可以确定实际沉积在摊铺机前方的混凝土体积。 铺面监测装置提供数据,在摊铺机进料时,所述数据允许物料在跨过摊铺机的工 作宽度上更均匀地散布和/或允许控制散布装置,以在摊铺机进料后改善物料的散布。 本发明的一个实施例设置成使得数据或信号处理装置配置成从高度轮廓数据或 高度轮廓信号来确定体积数据,该体积数据描述沉积在摊铺装置前方的物料体积。然后可 以在数据或信号处理装置中对该体积数据进行进一步的数据或信号处理。如果已知沉积物 料的体积,则可以计算该体积将持续多长时间。如果体积不足,则可以降低摊铺机的进料速 度或停止摊铺机。如果已知要被摊铺的物料体积,则也可以确定物料需求。 一个特别优选的实施例设置成使得数据或信号处理装置配置为从高度轮廓数据 或高度轮廓信号以及从描述给定标称高度的数据来确定其中物料的高度等于或大于标称 高度的高度轮廓部分和/或确定其中物料的高度小于标称高度的高度轮廓部分。以这种方 式,可以确定摊铺装置前方的各个积聚物的高度。因此,描述标称高度的数据提供这样的认 识:在哪个区域中仍必须沉积物料,和/或必须将物料运输到哪些区域中。 在最简单的情况下,描述指定标称高度的数据只能为标称高度定义单个值。为了 判定物料积聚的高度是否足够,还可以规定多个高度值,例如以形成平均值,其指示在确定 区域中物料积聚的高度。 描述标称高度的数据可以是可以指定的值,也可以是自动确定的值,例如标称高 度。摊铺机可以具有输入装置,可以使用该输入装置手动输入标称高度。标称高度尤其取决 于待摊铺物料的摊铺高度、摊铺宽度、摊铺速度和物料特性。数据或信号处理装置可配置为 基于使用输入装置输入的待摊铺物料的摊铺高度和/或摊铺宽度和/或摊铺速度和/或物料 特性来自动地确定描述指定的标称高度的数据。 摊铺机优选地具有显示和/或信号装置,该显示和/或信号装置与数据或信号处理 装置协作,并且配置为显示或输出高度轮廓的符号和/或信号。例如,显示和/或信号装置可 用于显示沉积物料的体积。当体积超过或低于规定值、特别是摊铺所需的体积时,显示和/ 或信号装置还可以发出(警报)信号,诸如视觉或声音警报信号。 6 CN 111608054 A 说 明 书 3/9 页 显示和/或信号装置可以具有一个或多个显示和/或信号构件,诸如屏幕,光学、声 学或触觉信号发生器。显示和/或信号构件可以设置在摊铺机的机器框架上和/或设置在便 携式单元上,特别是设置在平板电脑上,或设置在一组摊铺机中的另一个摊铺机上。机器框 架上的显示和/或信号构件优选应在货车驾驶员的视野内清晰可见,即,显示和/或信号构 件的表面应在横向于工作方向的平面内,并指向工作方向。 特别优选的实施例设置成使得显示和/或信号装置配置为对于物料的高度小于标 称高度的部分显示或输出第一符号和/或信号,而对于物料的高度大于标称高度的部分显 示或输出第二符号和/或信号。该实施例为挖掘机的机器操作员或货车驾驶员提供为了可 能的最均匀进料所需的信息。 本发明的另一方面不是进料过程的可视化,而是借助于铺面监测装置对散布过程 的控制。沿横向于工作方向的物料散布通过散布装置进行,该散布装置在工作方向上布置 在摊铺装置的前方。 为了控制散布操作,摊铺机具有与数据或信号处理装置协作的控制装置,该控制 装置配置为将摊铺装置控制为将物料从其中物料的高度大于标称高度的部分运输到其中 物料的高度小于标称高度的部分,使得物料在摊铺机的整个工作宽度上尽可能均匀地散 布。所述控制可以基于算法,该算法使得特别快速和有效地散布物料成为可能。物料的散布 可以用已知的散布装置进行。 在一个优选的实施例中,物料的自动散布是通过散布装置进行的,该散布装置具 有可横向于工作方向运动的散布构件,也称为散布犁。散布构件可以从较低位置提升到较 高位置,并且可以从较高位置降低到较低位置,从而可以穿过物料的积聚物或者可以将物 料推到任一侧。散布装置形成为生成描述散布构件位置的位置数据并且可以由控制装置进 行评估。 数据或信号处理装置配置为确定其中物料的高度大于期望高度的部分是在其中 物料的高度为小于期望高度的部分的左侧还是右侧。散布构件的控制取决于其中物料的高 度大于标称高度的部分是在其中物料的高度小于标称高度的部分的左侧还是右侧,以及取 决于散布构件是在其中物料的高度大于标称高度的部分的左侧还是右侧。基于通过铺面监 测装置获得的高度轮廓数据或高度轮廓信号以及控制装置的位置数据,降低或升高散布构 件并向左或向右运动,以检测多余的物料并将其运输到物料短缺的区域。 然而,物料的散布也可以用已知的散布螺旋钻进行。如果散布装置具有多个散布 螺旋钻(spreading auger),例如左右散布螺旋钻,则可以根据物料的散布来控制一个或另 一个散布螺旋钻,以便在整个工作宽度上均匀地散布物料。 所述铺面监测装置优选地具有距离测量系统,该距离测量系统配置为测量在与所 述机器框架相关的至少一个参考点与所述物料的表面之间的距离。 在一个实施例中,铺面监测装置的距离测量系统具有多个横向于工作方向分布的 距离传感器,特别是激光传感器,超声波传感器,电感式或电容式距离传感器,其分别分配 给高度轮廓的特定部分。作为结果,摊铺机的整个工作宽度被分成多个部分,每个部分由一 个或多个距离传感器监测。 距离传感器形成为测量在与机器框架相关的参考点与位于与距离传感器相关联 的部分中的物料的表面之间的距离。每个距离传感器可用于进行点测量或相对于积聚物料 7 CN 111608054 A 说 明 书 4/9 页 表面的特定区域的测量。然而,距离测量系统也可以只具有一个距离传感器。 代替一个或多个传统的距离传感器或除了一个或多个传统的距离传感器之外,还 可以利用具有一个或多个摄像系统的距离测量系统来进行测量,其中摄像系统设计为计算 捕获图像中单个像素的范围。这种现有技术的摄像系统利用传输时间方法来测量距离。铺 面被光脉冲照亮,并针对像素测量光返回摄像机所需的时间。然后根据传输时间来计算范 围。因此,在该实施例中的高度轮廓数据或高度轮廓信号描述物料积聚的三维图像,并允许 对其进行测量,从而可以确定其体积和/或散布。这些摄像系统称为TOF摄像机(飞行时间, time of flight)。距离测量系统可以具有记录散布装置铺面的至少一部分的一个或多个 TOF摄像机。 原则上,可以使用用于确定范围或距离的任何期望的技术,例如3D或立体摄像。 带有距离测量系统的铺面监测装置可以形成结构单元。例如,距离传感器或摄像 系统可以安装在沿工作方向布置在散布装置前方的框架上。一个实施例设置成使得铺面监 测装置包括多个模块单元,每个模块单元具有一个或多个横跨工作方向分布的距离传感器 或一个或多个横跨工作方向分布的摄像系统。通过这种铺面监测装置的模块化构造,可以 适应摊铺机的不同工作宽度,其中所使用的模块的数量由摊铺机的工作宽度确定。 此外,可以通过铺面监测装置进行摊铺过程例如摊铺混凝土的体积的文档记录。 这一点是重要的,因为沉积在摊铺机前方的混凝土的体积与已经摊铺的混凝土的体积不 同,因为在摊铺过程中混凝土被压实。因此,例如,可以假定压实程度和/或可以预测未来施 工阶段所需的混凝土要求。 附图说明 下面参考附图更详细地解释根据本发明的实施例。 其中: 图1是滑模摊铺机的高度简化的示意性侧视图; 图2是从图1的箭头II方向的滑模摊铺机的示意图; 图3是摄像系统、数据或信号处理装置、显示装置以及散布装置的输入装置和控制 装置的框图; 图4是用于说明散布装置的驱动装置的控制的流程图; 图5A和图5B是用于说明图4的各个方法步骤的物料积聚的示意图; 图6是由多个模块单元构成的铺面监测装置;以及 图7是以高度简化示意图示出的联合摊铺机。 附图标记说明 H实际实际高度 H标称标称高度。











