
技术摘要:
本发明提供一种实时检测Ad hoc网络关键节点的方法及装置,所述方法包括:获取无人机实时采集的航拍视频图像,根据预设的图像帧数参数数值,获取当前时刻ti对应的图像序列,识别和跟踪当前时刻的Ad hoc网络节点;基于当前时刻Ad hoc网络节点的位置和节点的有效通信距离 全部
背景技术:
Ad hoc网络是一种由若干带有通信收发装置的节点构成的、不依赖现有固定网设 施支撑的、能够自组织的分布式网络。Ad hoc网络具有组网灵活、易于快速部署、机动性好、 抗毁性强、支持“动中通”等特性,可以在任何时刻、任何地点不需要硬件基础网络设施的支 持,快速构建一个通信网络。Ad hoc网络广泛应用于军事通信、紧急救援通信、偏远地区通 信等需要快速部署、动态组网的通信场合。 在Ad hoc网络中,为了实现任意节点间的可靠数据传输,必需保证网络的全连通 性,即网络在高动态环境下是一个连通的整体结构,不存在分割的子网或孤立的节点。 为了保证Ad hoc网络的全连通性,需要对网络中节点的情况进行实时监控,以便 及时掌握网络节点间连通关系的动态变化,并找出影响网络连通性的关键节点。因此,需要 对 Ad hoc网络的拓扑结构进行实时检测,判断当前网络的连通状况并检测出 Ad hoc网络 的关键节点,以便维护人员随时调整节点间的位置关系,确保 Ad hoc网络的连通性。 网络拓扑信息是检测网络关键节点的基础,网络拓扑信息的获取方式直接影响着 时变网络关键节点识别的准确性和时效性。目前获取 Ad hoc网络的拓扑结构的方法主要 有基于协议的拓扑发现方法和基于目标网络信号的拓扑推断方法。基于协议的拓扑发现方 法采用代理技术、利用网络中相关的协议,通过发送探测包获得目标网络中的节点及其连 接关系。这种方法使用Ad hoc网络自身的传输通路传递网络监控信息,由于网络节点的性, 存在网络中出现存在孤立节点或分割子网的可能,造成这些节点与管理中心节点之间传输 通路的中断,从而无法得到全网连通状况的网络拓扑。由于Ad hoc网络的分布范围较大、网 络节点的性以及网络使得环境复杂,造成在复杂地理环境下较难实现在目标区域合理部署 多个侦收设备;网络中节点的,使得信号辐射源的精确定位变得非常困难,而且将信号辐射 源与具体的网络节点关联起来也很不容易,从而造成获取的网络拓扑无法及时反映实际网 络拓扑的动态变化,侦收设备无法合理部署,不能覆盖网络中所有的节点,无法检测网络中 所有节点的连通关系。
技术实现要素:
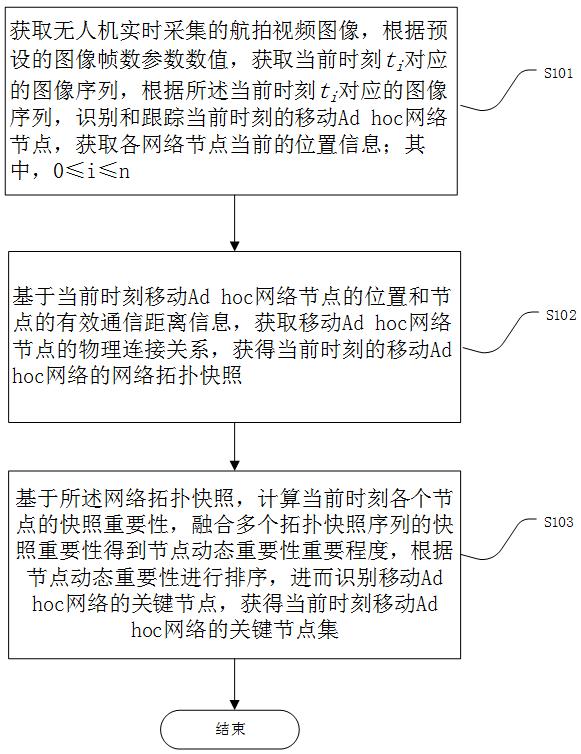
为解决上述技术问题,本发明提出了一种实时检测Ad hoc网络关键节点的方法及 装置,所述方法及装置,用以解决现有技术中难于合理部署信息采集设备、Ad hoc网络拓扑 结构更新时效性差、网络拓扑信息获取不全面的技术问题。 根据本发明的第一方面,提供一种实时检测Ad hoc网络关键节点的方法,所述方 法包括以下步骤: 步骤S101:获取无人机实时采集的航拍视频图像,根据预设的图像帧数参数数值,获取 9 CN 111601361 A 说 明 书 2/13 页 当前时刻ti对应的图像序列,根据所述当前时刻ti对应的图像序列,识别和跟踪当前时刻的 Ad hoc网络节点,获取各网络节点当前的位置信息;其中,0≤i≤n; 步骤S102:基于当前时刻Ad hoc网络节点的位置和节点的有效通信距离信息,获取Ad hoc网络节点的物理连接关系,获得当前时刻的Ad hoc网络的网络拓扑快照; 步骤S103:基于所述网络拓扑快照,计算当前时刻各个节点的快照重要性,融合多个拓 扑快照序列的快照重要性得到节点动态重要性,根据节点动态重要性进行排序,进而识别 Ad hoc网络的关键节点,获得当前时刻Ad hoc网络的关键节点集。 进一步地,所述步骤S101:获取无人机实时采集的航拍视频图像,根据预设的图像 帧数参数数值,获取当前时刻ti对应的图像序列,根据所述当前时刻ti对应的图像序列,识 别和跟踪当前时刻的Ad hoc网络节点,获取各网络节点当前的位置信息,包括: 步骤S10101:获取无人机实时采集的航拍视频图像,根据图像格式和分辨率定义图像 坐标系; 步骤S10102:根据预设的图像帧数参数数值k,获取当前时刻长度为k的图像序列;按照 时间顺序对k个图像帧进行排序;令j=1;历史节点轨迹集置X为空;检测结果集Y置为空; 步骤S10103:从图像序列中获取第j个图像帧为当前图像帧; 步骤S10104:根据节点检测策略从当前图像帧获取网络节点的检测结果集Y,所述检测 结果集的每个检测结果包括:网络节点的纹理特征和位置信息; 所述节点检测策略包括:提取网络节点训练样本集中样本的LBP特征向量,通过支持向 量机SVM算法进行特征分类,得到网络节点检测器;采用局部二值模式LBP算子提取图像的 纹理特征;用滑动窗口的方式遍历当前图像帧,进行网络节点的检测搜索,获得检测结果 集,所述检测结果集为各网络节点状态的观测值,状态的观测值包括网络节点的外观纹理 特征和在图像中的位置信息; 步骤S10105:若检测结果集为空,则将j赋值为j 1,进入步骤S10103; 步骤S10106:若历史节点轨迹集为空,则将检测结果集中的所有检测结果确定为新生 节点,分别为其分配跟踪ID号,每个检测结果作为一条新轨迹加入历史节点轨迹集,将j赋 值为j 1,进入步骤S10103;否则,对历史节点轨迹集中的每一条轨迹,基于节点匀速运动模 型用Kalman滤波器预测该条轨迹对应节点在当前帧中的位置,并用预测值更新该条轨迹的 位置信息; 步骤S10107:计算历史节点轨迹集中各条轨迹与当前检测结果集各检测结果的状态相 似度,生成关联代价矩阵Cn*m,并基于关联代价矩阵运用匈牙利算法获取最优数据关联; 所述计算历史节点轨迹集中各条轨迹与当前检测结果集中各检测结果的状态相似度, 包括: X={xp|p=1,2,… ,n}为当前时刻存在n个节点的历史节点轨迹集, Y={yq|q=1,2,… ,m} 为获得m个节点检测结果的检测结果集;历史节点轨迹集X中第p个节点的轨迹表示为xp= {θp,φ p} ,其中θp、φ p分别表示节点p的外观特征和位置信息;检测结果集Y中第q个检测结 果表示为yq={aq,bq},其中aq、bq分别表示检测结果q的外观特征和在图像中的位置; 计算外观相似度ρA(xp,yq):获取历史节点轨迹集中节点p的外观特征θp与检测结果集 中检测结果q的外观特征aq,用欧氏距离D(θp,aq)计算特征向量θp、aq之间的相似程度;ρA (xp,yq)=1/(1 D(θp,aq)) ; 10 CN 111601361 A 说 明 书 3/13 页 计算位置相似度ρM(xp,yq):获取历史节点轨迹集中节点p的预测位置φ p与检测结果集 中检测结果q的观测位置bq,用欧氏距离D(φ p,bq)计算φ p、bq之间的近邻程度;ρM(xp,yq)=1/ (1 D(φ p,bq)); 计算状态相似度ρ(xp,yq):状态相似度为外观相似度ρA(xp,yq)与位置相似度ρM(xp,yq) 的乘积,ρ(xp,yq)= ρA(xp,yq) ×ρM(xp,yq); 生成一个大小为n×m关联代价矩阵Cn*m,其矩阵元素cpq表示轨迹xp与检测结果yq的关 联代价, cpq=-log(ρ(xp,yq)); 步骤S10108:按如下策略更新历史节点轨迹集, 1)对于历史节点轨迹集中的任一轨迹xp,若轨迹xp与某一个检测结果yq相关联,若关联 代价cpq小于预设阈值-log(Ɛ ),则用与之关联的检测结果yq的观测值bq更新历史节点轨迹 集中的轨迹xp的预测值φ p;否则按照轨迹xp未获得关联检测结果处理; 2) 对于历史节点轨迹集中的任一轨迹xp,若轨迹xp在当前帧中未获得与之关联的检 测结果,则轨迹xp的未获关联计数器加1;如果连续fc帧没有获得关联的检测结果,则在历史 节点轨迹集中删除该节点及其轨迹;其中,fc为预设阈值; 步骤S10109:对未获得关联轨迹的检测结果,则确定其为新生节点,为其分配跟踪ID 号,将检测结果yq ={aq,bq}作为新轨迹加入历史节点轨迹集; 步骤S10110:判断j是否等于k;若是,方法结束;若否,根据历史节点轨迹集输出当前时 刻网络节点的位置,将j赋值为j 1,进入步骤S10103。 进一步地,所述步骤S102:基于当前时刻Ad hoc网络节点的位置和节点的有效通 信距离信息,获取Ad hoc网络节点的物理连接关系,获得当前时刻的Ad hoc网络的网络拓 扑快照,包括: 步骤S1021:基于节点间物理链路存在性判定准则确定Ad hoc网络节点间的物理连接 关系,所述节点间物理链路存在性判定准则包括: 网络类型为同质网络,所有节点都具有相同的最大通信距离;节点采用全向天线,每个 节点的传输范围为以该节点为中心、以最大通信距离为半径的圆;当两个节点的欧氏距离 小于或等于最大通信距离时,则这两个节点互为邻居,它们之间存在一条物理链路; 步骤S1022:使用圆盘图描述Ad hoc网络节点间的连接关系; 步骤S1023:优化单位圆盘图,包括: 按照平面性原则,即拓扑图中若没有两条边在顶点以外发生边交叉,则删除非顶点交 叉的边;按照稀疏性原则,在保证拓扑图连通性的前提下,删除拓扑图中多余的边; 步骤S1024:用单位Delaunay三角剖分图表示单位圆盘图的优化结果,单位Delaunay三 角剖分图中的点表示网络节点,连接点的边即表示网络节点间的物理链路;生成当前时刻 节点间物理连接关系的拓扑快照; 所述步骤S1024,包括: 步骤S10241:确定Delaunay三角形的约束条件;所述约束条件包括:1)任意两个 Delaunay三角形之间除端点外无交点,即Delaunay三角形之间是互不相交的;2)任意一个 Delaunay三角形不包含其它Delaunay三角形,即Delaunay三角形之间是互不包含的;3)如 果一个Delaunay三角形不包含区域边界的边,则该Delaunay三角形的三条边的长度都小于 或等于节点的有效通信距离; 11 CN 111601361 A 说 明 书 4/13 页 步骤S10242:根据节点当前的位置和节点的有效通信距离信息,基于Delaunay三角形 的约束条件,使用基于欧氏最小生成树的三角剖分算法,构造单位Delaunay三角剖分图; 步骤S10243:根据最小角最大化准则,局部优化单位Delaunay三角剖分图,避免在拓扑 快照中出现不合理边; 步骤S10244:删除单位Delaunay三角剖分图边缘超出节点有效通信距离的边,获得描 述当前时刻节点间物理连接关系的拓扑快照。 进一步地,所述步骤S103:基于所述网络拓扑快照,计算当前时刻各个节点的快照 重要性,融合多个拓扑快照序列的快照重要性得到节点动态重要性,根据节点动态重要性 进行排序,进而识别Ad hoc网络的关键节点,获得当前时刻Ad hoc网络的关键节点集,包 括: 步骤S1031:基于ti时刻网络拓扑快照,获取其中一个未计算动态重要性的节点vj; 步骤S1032:计算节点vj在ti时刻的快照重要性Ci(vj) , 节点vj的快照重要性Ci(vj)为依照ti时刻拓扑快照Gi得到的节点vj的重要性度量,节点 重要性度量指标是节点度数、介数、中心度中的一个或多个; ti时刻包含N个节点的拓扑快照Gi用邻接矩阵A=(aij)N*N表示;其中aii=0,若节点vi、vj 之间存在边,则aij=aji=1,否则aij=aji=0; 节点vj的度数记为: ,Ci(vj)为节点vj度数的归一化值, 步骤S1033:计算节点vj在ti时刻的动态重要性Ii(vj) , 节点vj在ti时刻的动态重要性Ii(vj)是在 [ti-Δω,ti]时间段内其所有的快照重要性度 量的融合, 其中,α为一常数,用于表示衰减常数,0<α<0.5;M表示当前滑动窗口中元组的个数1≤M ≤Δω,Δω表示滑动窗口大小,将每一时刻的拓扑快照作为一个单位数据,拓扑快照按时 间戳的先后顺序进入滑动窗口,每当有一个新的拓扑快照到达,若M=Δω,窗口则向前滑动 一个单位,使得窗口内的数据得到更新,若M<Δω,则窗口内元组个数M加1;基于窗口内更 新后的数据计算节点vj在ti时刻的动态重要性Ii(vj) ;C i-M 1 (vj)、C i-M 2 (vj)分别表示节 点vj在ti-M 1、ti-M 2时刻的快照重要性; 步骤S1034:将节点vj标记为已处理,判断当前时刻ti的拓扑快照中,是否所有节点都 被标记为已处理,若是,进入步骤S1035;若否,进入步骤S1031; 步骤S1035:对全部节点的动态重要性按从大到小进行排序,根据预设的关键节点数量 12 CN 111601361 A 说 明 书 5/13 页 num,选择排前num个节点作为关键节点,关键节点构成的集合为关键节点集。 根据本发明第二方面,提供一种实时检测Ad hoc网络关键节点的装置,所述装置 包括: 网络节点识别跟踪模块:获取无人机实时采集的航拍视频图像,根据预设的图像帧数 参数数值,获取当前时刻ti对应的图像序列,根据所述当前时刻ti对应的图像帧序列,识别 和跟踪当前时刻的Ad hoc网络节点,获取各网络节点当前的位置信息;其中,0≤i≤n; 网络拓扑快照生成模块:基于当前时刻Ad hoc网络节点的位置和节点的有效通信距离 信息,获取Ad hoc网络节点的物理连接关系,获得当前时刻的Ad hoc网络的网络拓扑快照; 网络关键节点识别模块:基于所述网络拓扑快照,计算当前时刻各个节点的快照重要 性,融合多个拓扑快照序列的快照重要性得到节点动态重要性,根据节点动态重要性进行 排序,进而识别Ad hoc网络的关键节点,获得当前时刻Ad hoc网络的关键节点集。 进一步地,所述网络节点识别跟踪模块,包括: 获取图像子模块:获取无人机实时采集的航拍视频图像,根据图像格式和分辨率定义 图像坐标系; 获取轨迹子模块:根据预设的图像帧数参数数值k,获取当前时刻长度为k的图像序列; 按照时间顺序对k个图像帧进行排序;令j=1;历史节点轨迹集置X为空;检测结果集Y置为 空; 图像帧获取子模块:从图像序列中获取第j个图像帧为当前图像帧; 检测结果集生成子模块:根据节点检测策略从当前图像帧获取网络节点的检测结果集 Y,所述检测结果集的每个检测结果包括:网络节点的纹理特征和位置信息; 所述节点检测策略包括:提取网络节点训练样本集中样本的LBP特征向量,通过支持向 量机SVM算法进行特征分类,得到网络节点检测器;采用局部二值模式LBP算子提取图像的 纹理特征;用滑动窗口的方式遍历当前图像帧,进行网络节点的检测搜索,获得检测结果 集,所述检测结果集为各网络节点状态的观测值,状态的观测值包括网络节点的外观纹理 特征和在图像中的位置信息; 第一判断子模块:若检测结果集为空,则将j赋值为j 1; 预测子模块:若历史节点轨迹集为空,则将检测结果集中的所有检测结果确定为新生 节点,分别为其分配跟踪ID号,每个检测结果作为一条新轨迹加入历史节点轨迹集,将j赋 值为j 1;否则,对历史节点轨迹集中的每一条轨迹,基于节点匀速运动模型用Kalman滤波 器预测该条轨迹对应节点在当前帧中的位置,并用预测值更新该条轨迹的位置信息; 状态相似度计算子模块:计算历史节点轨迹集中各条轨迹与当前检测结果集各检测结 果的状态相似度,生成关联代价矩阵Cn*m,并基于关联代价矩阵运用匈牙利算法获取最优数 据关联; 所述计算历史节点轨迹集中各条轨迹与当前检测结果集中各检测结果的状态相似度, 包括: X={xp|p=1,2,… ,n}为当前时刻存在n个节点的历史节点轨迹集, Y={yq|q=1,2,… ,m} 为获得m个节点检测结果的检测结果集;历史节点轨迹集X中第p个节点的轨迹表示为xp= {θp,φ p} ,其中θp、φ p分别表示节点p的外观特征和位置信息;检测结果集Y中第q个检测结 果表示为yq={aq,bq},其中aq、bq分别表示检测结果q的外观特征和在图像中的位置; 13 CN 111601361 A 说 明 书 6/13 页 计算外观相似度ρA(xp,yq):获取历史节点轨迹集中节点p的外观特征θp与检测结果集 中检测结果q的外观特征aq,用欧氏距离D(θp,aq)计算特征向量θp、aq之间的相似程度;ρA (xp,yq)=1/(1 D(θp,aq)) ; 计算位置相似度ρM(xp,yq):获取历史节点轨迹集中节点p的预测位置φ p与检测结果集 中检测结果q的观测位置bq,用欧氏距离D(φ p,bq)计算φ p、bq之间的近邻程度;ρM(xp,yq)=1/ (1 D(φ p,bq)); 计算状态相似度ρ(xp,yq):状态相似度为外观相似度ρA(xp,yq)与位置相似度ρM(xp,yq) 的乘积,ρ(xp,yq)= ρA(xp,yq) ×ρM(xp,yq); 生成一个大小为n×m关联代价矩阵Cn*m,其矩阵元素cpq表示轨迹xp与检测结果yq的关 联代价, cpq=-log(ρ(xp,yq)) 历史节点轨迹更新子模块,按如下策略更新历史节点轨迹集, 1)对于历史节点轨迹集中的任一轨迹xp,若轨迹xp与某一个检测结果yq相关联,若关联 代价cpq小于预设阈值-log(Ɛ ),则用与之关联的检测结果yq的观测值bq更新历史节点轨迹 集中的轨迹xp的预测值φ p;否则按照轨迹xp未获得关联检测结果处理; 2) 对于历史节点轨迹集中的任一轨迹xp,若轨迹xp在当前帧中未获得与之关联的检 测结果,则轨迹xp的未获关联计数器加1;如果连续fc帧没有获得关联的检测结果,则在历史 节点轨迹集中删除该节点及其轨迹;其中,fc为预设阈值; 历史节点轨迹集再次更新子模块,对未获得关联轨迹的检测结果,则确定其为新生节 点,为其分配跟踪ID号,将检测结果yq ={aq,bq}作为新轨迹加入历史节点轨迹集; 第二判断子模块:判断j是否等于k。 进一步地,所述网络拓扑快照生成模块,包括: 连接关系确定子模块:基于节点间物理链路存在性判定准则确定Ad hoc网络节点间的 物理连接关系,所述节点间物理链路存在性判定准则包括: 网络类型为同质网络,所有节点都具有相同的最大通信距离;节点采用全向天线,每个 节点的传输范围为以该节点为中心、以最大通信距离为半径的圆;当两个节点的欧氏距离 小于或等于最大通信距离时,则这两个节点互为邻居,它们之间存在一条物理链路; 描述子模块:使用圆盘图描述Ad hoc网络节点间的连接关系; 优化子模块:优化单位圆盘图,包括: 按照平面性原则,即拓扑图中若没有两条边在顶点以外发生边交叉,则删除非顶点交 叉的边;按照稀疏性原则,在保证拓扑图连通性的前提下,删除拓扑图中多余的边; 拓扑快照生成子模块:用单位Delaunay三角剖分图表示单位圆盘图的优化结果,单位 Delaunay三角剖分图中的点表示网络节点,连接点的边即表示网络节点间的物理链路;生 成当前时刻节点间物理连接关系的拓扑快照; 所述拓扑快照生成子模块,包括: 第一确定子模块:确定Delaunay三角形的约束条件;所述约束条件包括:1)任意两个 Delaunay三角形之间除端点外无交点,即Delaunay三角形之间是互不相交的;2)任意一个 Delaunay三角形不包含其它Delaunay三角形,即Delaunay三角形之间是互不包含的;3)如 果一个Delaunay三角形不包含区域边界的边,则该Delaunay三角形的三条边的长度都小于 或等于节点的有效通信距离; 14 CN 111601361 A 说 明 书 7/13 页 第一构造子模块:根据节点当前的位置和节点的有效通信距离信息,基于Delaunay三 角形的约束条件,使用基于欧氏最小生成树的三角剖分算法,构造单位Delaunay三角剖分 图; 第一删除子模块:根据最小角最大化准则,局部优化单位Delaunay三角剖分图,避免在 拓扑快照中出现不合理边; 第二删除子模块:删除单位Delaunay三角剖分图边缘超出节点有效通信距离的边,获 得描述当前时刻节点间物理连接关系的拓扑快照。 进一步地,所述网络关键节点识别模块,包括: 获取节点子模块:基于ti时刻网络拓扑快照,获取其中一个未计算动态重要性的节点 vj; 节点快照重要性计算模块:计算节点vj在ti时刻的快照重要性Ci(vj) , 节点vj的快照重要性Ci(vj)为依照ti时刻拓扑快照Gi得到的节点vj的重要性度量,节点 重要性度量指标是节点度数、介数、中心度中的一个或多个; ti时刻包含N个节点的拓扑快照Gi用邻接矩阵A=(aij)N*N表示;其中aii=0,若节点vi、vj 之间存在边,则aij=aji=1,否则aij=aji=0; 节点vj的度数记为: ,Ci(vj)为节点vj度数的归一化值, 节点动态重要性计算模块:计算节点vj在ti时刻的动态重要性Ii(vj) , 节点vj在ti时刻的动态重要性Ii(vj)是在 [ti-Δω,ti]时间段内其所有的快照重要性度 量的融合, 其中,α为一常数,用于表示衰减常数,0<α<0.5;M表示当前滑动窗口中元组的个数1≤M ≤Δω,Δω表示滑动窗口大小,将每一时刻的拓扑快照作为一个单位数据,拓扑快照按时 间戳的先后顺序进入滑动窗口,每当有一个新的拓扑快照到达,若M=Δω,窗口则向前滑动 一个单位,使得窗口内的数据得到更新,若M<Δω,则窗口内元组个数M加1;基于窗口内更 新后的数据计算节点vj在ti时刻的动态重要性Ii(vj) ;C i-M 1 (vj)、C i-M 2 (vj)分别表示节 点vj在ti-M 1、ti-M 2时刻的快照重要性; 标记子模块:将节点vj标记为已处理,判断当前时刻ti的拓扑快照中,是否所有节点都 被标记为已处理; 排序子模块:对全部节点的动态重要性按从大到小进行排序,根据预设的关键节点数 量num,选择排前num个节点作为关键节点,关键节点构成的集合为关键节点集。 根据本发明第三方面,提供一种实时检测Ad hoc网络关键节点系统,包括: 15 CN 111601361 A 说 明 书 8/13 页 处理器,用于执行多条指令; 存储器,用于存储多条指令; 其中,所述多条指令,用于由所述存储器存储,并由所述处理器加载并执行如前所述的 实时检测Ad hoc网络关键节点的方法。 根据本发明第四方面,提供一种计算机可读存储介质,所述存储介质中存储有多 条指令;所述多条指令,用于由处理器加载并执行如前所述的实时检测Ad hoc网络关键节 点的方法。 根据本发明的上述方案,具有以下技术效果:(1)使用航拍无人机作为信息采集设 备,受地理环境因素的影响小,指定航拍区域后,航拍无人机可以自动规划航拍路径,只需 要一个位于目标区域内或附近的地面接收处理站。(2)可以及时更新Ad hoc网络的拓扑信 息,只需无人机航拍的视频图像和Ad hoc网络节点的外观物理特征这些很少的信息,即可 实现目标节点的定位和跟踪,并及时确定当前网络节点间连通关系的拓扑快照。由于无人 机航拍的视频图像通过宽带数据链路可以近实时地传回地面接收处理站,可以实现及时更 新Ad hoc网络的拓扑信息、及时获取Ad hoc网络拓扑的动态变化。(3)全面获取Ad hoc网络 的拓扑信息。由于无人机空中航拍的视野开阔,可以在较短时间内覆盖整个目标区域,得到 指定区域的全景视图,识别出Ad hoc网络的所有节点的当前位置,快速确定Ad hoc网络的 所有节点间连通关系的拓扑快照。(4)适用性广泛。本方案适用于所有采用Ad hoc组网技术 的网络,不需要在每个Ad hoc网络的节点安装定制的代理程序及节点定位装置,也不需要 掌握目标网络的通信体制。 上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段, 并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。 附图说明 构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明提供如下附 图进行说明。在附图中: 图1为本发明一个实施方式的实时检测Ad hoc网络关键节点的方法流程图; 图2为本发明一个实施方式的实时检测Ad hoc网络关键节点的装置结构框图。











