
技术摘要:
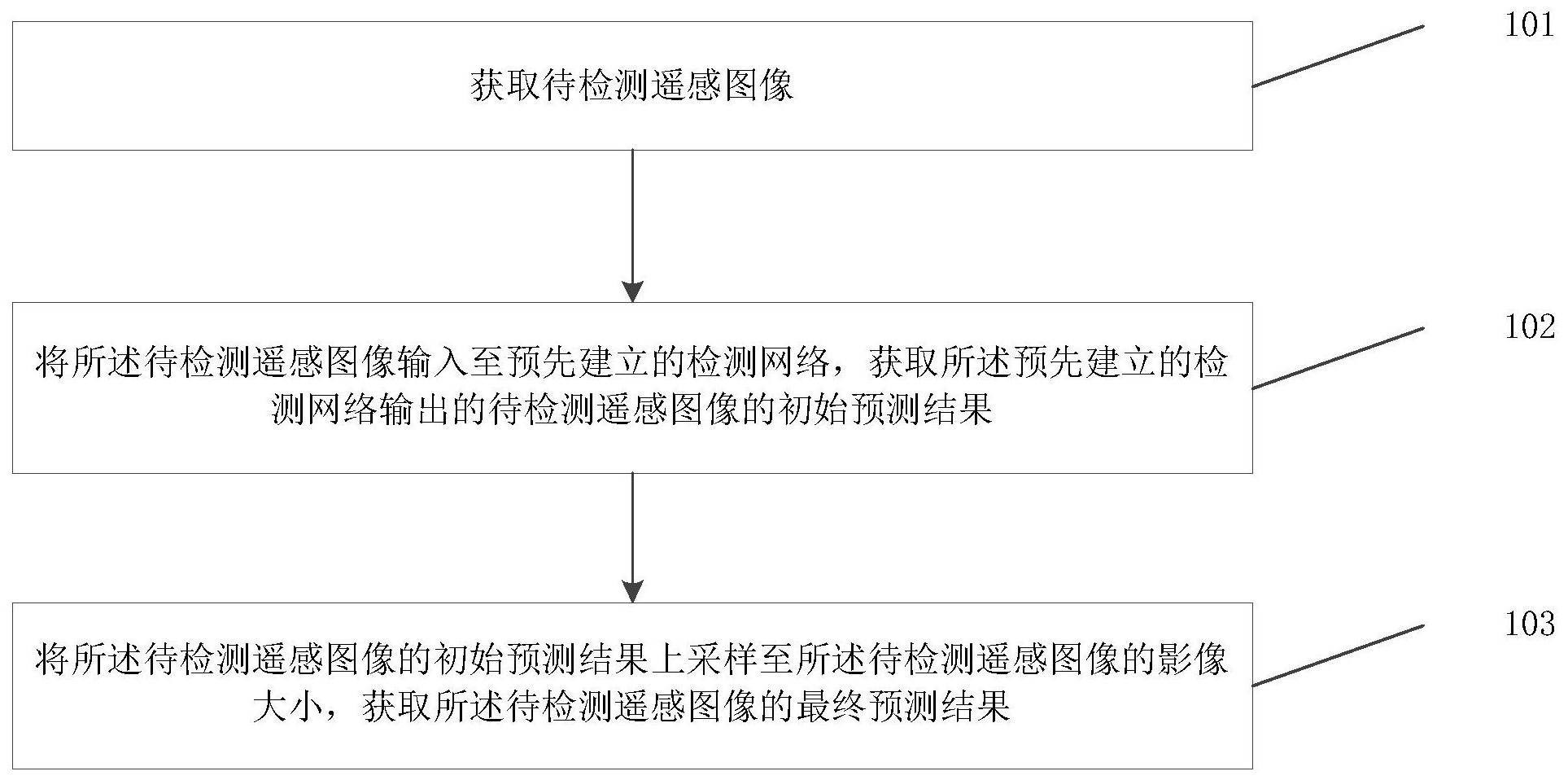
本发明涉及一种遥感图像检测方法及系统,所述方法包括:获取待检测遥感图像;将所述待检测遥感图像输入至预先建立的检测网络,获取所述预先建立的检测网络输出的待检测遥感图像的初始预测结果;将所述待检测遥感图像的初始预测结果上采样至所述待检测遥感图像的影像大 全部
背景技术:
近年来,深度学习的跨越式发展推动了计算机视觉领域的巨大进步,使得很多计 算机视觉的任务的性能达到了一个前所未有的高度。尽管深度网络模型在许多任务上都取 得了不俗表现,但这仅仅是在科研层面上进行的实验与尝试,如果考虑到实际应用将其移 植到嵌入式或者移动设备上,它将会受到多方面约束:1)模型参数量巨大;2)模型计算量 大;3)电能消耗大。 对于硬件资源有限的嵌入式或者移动设备来说,深度神经网络直接应用在时间与 空间上都受到巨大约束。因此,如何在保证模型效果的前提下对模型进行压缩已经成为了 一个热点问题,这使得深度网络模型压缩快速地发展起来。
技术实现要素:
针对现有技术的不足,本发明的目的是提供一种面向高分辨率遥感图像,能够实 现模型参数量小、泛化能力好、检测召回率高、对多尺度物体检测准确等优点的遥感图像检 测方法。 本发明的目的是采用下述技术方案实现的: 本发明提供了一种遥感图像检测方法,其改进之处在于,所述方法包括: 获取待检测遥感图像; 将所述待检测遥感图像输入至预先建立的检测网络,获取所述预先建立的检测网 络输出的待检测遥感图像的初始预测结果; 将所述待检测遥感图像的初始预测结果上采样至所述待检测遥感图像的影像大 小,获取所述待检测遥感图像的最终预测结果。 优选的,所述预先建立的检测网络的建立过程包括: 步骤1.对遥感图像数据中的遥感图像进行人工语义标注,并将所述遥感图像数据 划分为训练数据、验证数据和测试数据; 步骤2.对所述训练数据进行数据增强; 步骤3.将所述训练数据、验证数据和测试数据切片为512x512; 步骤4.利用所述训练数据、验证数据和测试数据对预先建立的教师网络进行训 练; 步骤5.基于训练完成的教师网络,采用知识蒸馏算法对预先建立的学生网络进行 训练,并将训练完成的学生网络作为所述预先建立的检测网络。 进一步的,所述预先建立的教师网络包括:ResNet152网络、多尺度特征融合模块、 候选区域生成模块、候选区域提取模块和分类回归模块; 所述ResNet152网络,用于提取训练数据的特征{C2,C3,C4,C5},其中,C2,C3,C4,C5分 4 CN 111582101 A 说 明 书 2/9 页 别为所述ResNet152网络中各最大池化层的输出特征; 所述多尺度特征融合模块,用于对{C2,C3,C4 ,C5}进行特征融合,并输出尺寸分别 为训练数据1/4、1/8、1/16、1/32的特征图{P2,P3,P4,P5}; 所述候选区域生成模块,用于分别生成P2,P3,P4,P5中每个像素点对应的锚框; 所述候选区域提取模块,用于提取各锚框中的RoI; 所述分类回归模块,用于将所述各锚框中的RoI连接起来获得特征Fea,并基于特 征Fea获取得分向量Score和位置向量Loc。 进一步的,所述预先建立的学生网络包括:特诊提取模块、多尺度特征融合模块、 候选区域生成模块、候选区域提取模块和分类回归模块; 所述特诊提取模块,用于提取训练数据的特征{C2,C3,C4,C5},其中,C2,C3,C4,C5分 别为所述特诊提取模块中各最大池化层的输出特征; 所述多尺度特征融合模块,用于对{C2,C3,C4 ,C5}进行特征融合,并输出尺寸分别 为训练数据1/4、1/8、1/16、1/32的特征图{P2,P3,P4,P5}; 所述候选区域生成模块,用于分别生成P2,P3,P4,P5中每个像素点对应的锚框; 所述候选区域提取模块,用于提取各锚框中的RoI; 所述分类回归模块,用于将所述各锚框中的RoI连接起来获得特征Fea,并基于特 征Fea获取得分向量Score和位置向量Loc。 进一步的,所述特诊提取模块为改进的ShuffleNet网络,其中,ShuffleNet网络的 改进过程包括: 利用预先建立的替换单元替换Shufflenet网络中的瓶颈单元,并去掉Shufflenet 网络中输出端侧的全连接层以及全局池化模块; 所述预先建立的替换单元包括依次连接的通道分割层、可分离卷积层、跳跃连接 层和通道混洗层; 所述通道分割层,用于将输入特征图分为第一分支和第二分支; 所述可分离卷积层,用于将所述第一分支依次经过1*1卷积降维、3*3可分离卷积 和1*1卷积升维; 所述跳跃连接层,用于将所述第二分支与所述可分离卷积层输出的特征图进行合 并拼接; 所述通道混洗层,用于对所述跳跃连接层输出的特征图进行转置操作。 进一步的,所述多尺度特征融合模块,包括:1*1卷积层、第一3*3卷积层、第二3*3 卷积层、第三3*3卷积层、第四3*3卷积层、第一合并连接层、第二合并连接层和第三合并连 接层; 所述1*1卷积层的输出端分别与所述第一3*3卷积层、第二3*3卷积层、第三3*3卷 积层和第四3*3卷积层的输入端连接;第三3*3卷积层和第四3*3卷积层的输出端连接第三 合并连接层的输入端,第二3*3卷积层和第三3*3卷积层的输出端连接第二合并连接层的输 入端,第一3*3卷积层和第三3*3卷积层的输出端连接第一合并连接层的输入端; 其中,所述第一合并连接层的输出端输出P2、第二合并连接层的输出端输出P3、第 三合并连接层的输出端输出P4、第四3*3卷积层的输出端输出P5。 进一步的,所述像素点对应的锚框为9个,每个锚框的尺寸和长宽比分别为128* 5 CN 111582101 A 说 明 书 3/9 页 128和1:1、128*128和1:2、128*128和2:1、256*256和1:1、256*256和1:2、256*256和2:1、 512*512和1:1、512*512和1:2以及512*512和2:1。 进一步的,所述分类回归模块具体用于: 将所述各锚框中的RoI连接起来获得特征Fea; 将特征Fea输入至以训练数据中物体的类别为准的分类层,获取分类层输出的得 分向量Score; 将特征Fea输入至以训练数据中物体的位置为准的回归层,获取回归层输出的位 置向量Loc。 所述步骤2包括:对所述训练数据依次按照概率0.5进行水平和垂直方向的随机翻 转,角度-20度到20度,步距1度的图像随机旋转操作,90度、180度、270度的固定角度随机旋 转操作,以及图像尺寸0.25到4倍随机缩放操作。 基于同一发明构思,本发明还提供了一种遥感图像检测系统,其改进之处在于,所 述系统包括: 获取模块,用于获取待检测遥感图像; 检测模块,用于将所述待检测遥感图像输入至预先建立的检测网络,获取所述预 先建立的检测网络输出的待检测遥感图像的初始预测结果; 采样模块,用于将所述待检测遥感图像的初始预测结果上采样至所述待检测遥感 图像的影像大小,获取所述待检测遥感图像的最终预测结果。 与最接近的现有技术相比,本发明具有的有益效果: 本发明提供了一种遥感图像检测方法及系统,所述方法包括:获取待检测遥感图 像;将所述待检测遥感图像输入至预先建立的检测网络,获取所述预先建立的检测网络输 出的待检测遥感图像的初始预测结果;将所述待检测遥感图像的初始预测结果上采样至所 述待检测遥感图像的影像大小,获取所述待检测遥感图像的最终预测结果;本发明提供的 技术方案面向高分辨率遥感图像,实现了模型参数量小、泛化能力好、检测召回率高、对多 尺度物体检测准确等优点; 进一步的,本发明提供发技术方案中,通过手工建立的检测网络使得检测网络有 较好的泛化能力,实现了轻量级网络架构的设计,并且在边缘计算设备上实现面向高分辨 率遥感图像的目标检测网络。 附图说明 图1是本发明一种遥感图像检测方法的流程图; 图2是本发明实施例中基于知识蒸馏训练的原理示意图; 图3是本发明实施例中预先建立的替换单元的结构示意图; 图4是本发明实施例中多尺度特征融合模块的结构示意图; 图5是本发明一种遥感图像检测系统的结构示意图。











