
技术摘要:
本发明披露了一种用于估计车辆反射器的高度的方法,该方法包括读取步骤,在该步骤中,同时读取来自车辆反射器的至少一个反射信号130,并且该至少一个反射信号130表示与车辆的相对速度有关的至少一项信息。进一步地,该方法包括确定步骤,在该步骤中,确定车辆速度的估 全部
背景技术:
测速相机可以确定车辆的各个反射器的相对速度及其在xy坐标中的位置。此处, 相对速度是反射器相对于测速相机的速度。然而,先前使用的雷达系统没有评估反射器的 物体高度。假设例如道路表面上方1米的一般(blanket)物体高度,并且通过计算将其与测 速相机的已知安装高度相结合。其结果是暴露出各种各样的缺陷。由于未知反射器的高度, 因此无法将所测得的相对速度正确地转换成绝对物体速度。取决于假设的物体高度是太高 还是太低,所计算出的物体速度也可能是太低或太高。因为高的物体(例如卡车)从一般物 体高度假设明显地偏离一米,所以速度测量误差超过3%的容许限。因此,估计车辆反射器 的高度对于满足速度测量的质量的要求是非常有帮助的。此外,估计高度对于车辆的分类 是非常有帮助的,因为车辆类别(例如,汽车或卡车)与高度密切相关。
技术实现要素:
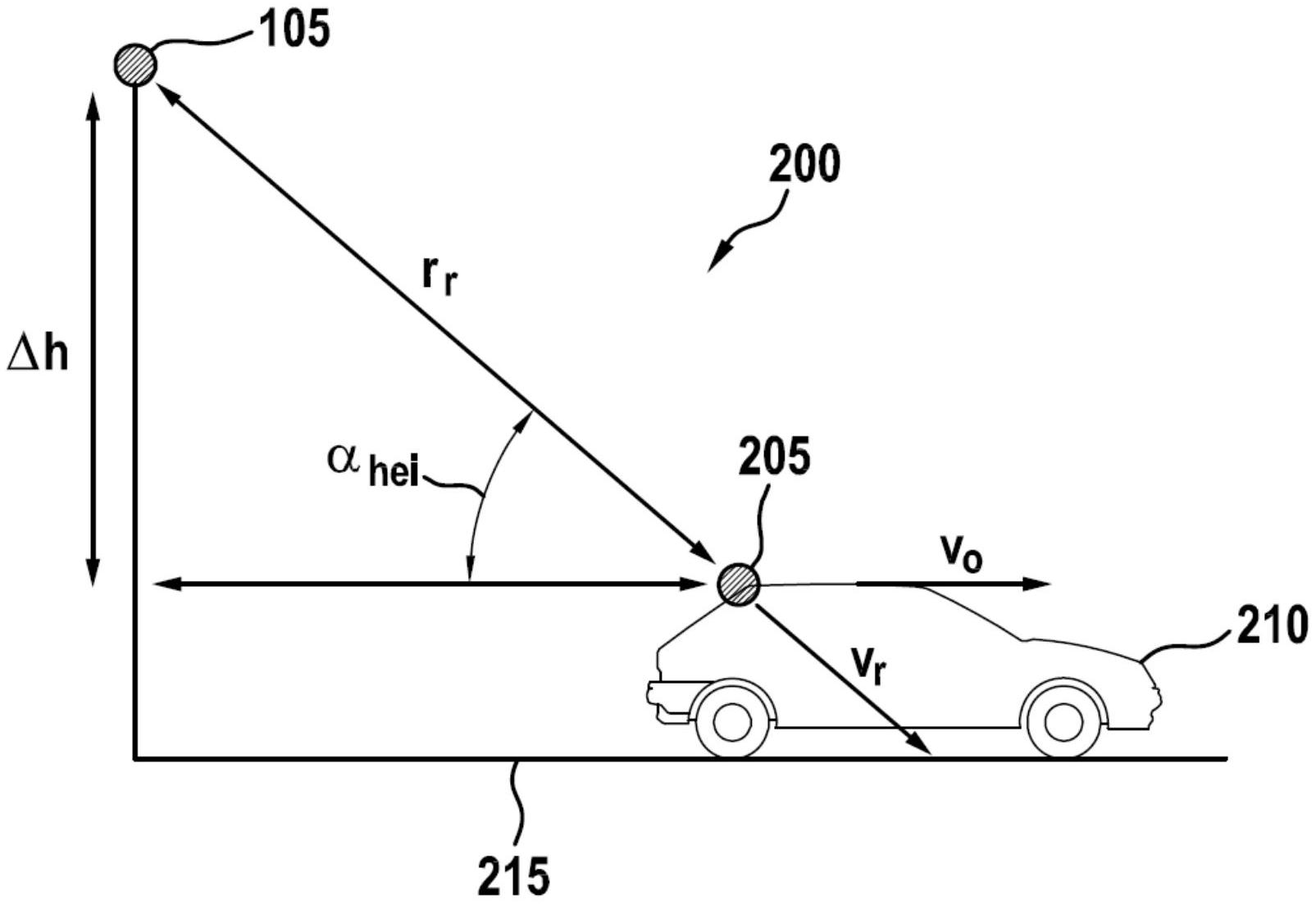
在此背景下,本发明在此提出了一种用于估计车辆反射器的高度的方法和一种用 于估计车辆反射器的高度的设备。本发明的有利实施例和进步从下面的描述中体现出来。 在考虑各种模型假设的情况下,此处提出的方法方案允许估计和/或测量车辆的 至少一个反射器和/或多个反射器的高度。有利地,该方法方案使车辆的分类得以改进并且 使车辆速度的测量更加准确。 本发明提出了一种用于估计车辆反射器的高度的方法,该方法包括以下步骤: 同时读取来自该车辆的反射器的至少一个反射信号,该至少一个反射信号表示与 该车辆的相对速度有关的至少一项信息; 确定该车辆的速度的估计值;以及 使用该车辆的相对速度和该车辆的速度的估计值来确认该反射器的高度的估计 值。 反射器可以是回复反射器或车辆车身的发射表面或发射区域,并且牢固地布置在 车辆上且优选地将入射光的波束向后投射到辐射源的方向上。具体而言,反射器可以在本 上下文中被实施成以反射信号的形式反射发射器装置的发射信号。作为示例,反射器可以 由平面镜或反射发射波束的任何其他材料制成。车辆可以是用于运送人员的车辆(例如以 高度自动化方式驾驶的车辆)、公共汽车或卡车、或小型运输卡车。速度的估计值可以是车 辆速度的近似(初始)估计值。此处,速度的估计值可以用于确认反射器的高度的估计值。该 高度的估计值可以是车辆反射器的高度的估计值,该估计值应当在用于估计车辆反射器的 高度的方法的过程中被确认或估计。 此处提出的用于估计车辆反射器的高度的方法可以包括在道路附近的、具有至少 4 CN 111742237 A 说 明 书 2/7 页 一个反射器的车辆。进一步地,在每次测量中还可以使用多个反射器。假设车辆速度恒定, 可以收集和使用来自多个时间偏移测量中的反射器的反射。特别被利用于实现该方法的 是,由于不正确地假设反射器高度而导致的速度误差在雷达附近是显著的,并且随着距雷 达的距离的增大,该速度误差逐渐趋于零。例如,通过回归来确定渐近函数的曲线,并且因 此只要车辆速度是恒定的,就可以在雷达附近实现高度估计。 根据一个实施例,在读取步骤中,反射信号可以进一步表示与车辆距发出信号的 发射器装置的相对距离有关的和/或与高度角有关的信息,反射器相对于该发出信号的发 射器设备布置在该高度角处,在确认步骤中,使用与该车辆距该发出信号的发射器装置的 相对距离和/或该高度角有关的信息来进一步确认该反射器的高度的估计值,该反射器相 对于该发出信号的发射器设备布置在该高度角处。此处,该发出信号的发射器设备发出发 射信号,该发射信号被反射而形成反射信号。此处提出的该方案的此种实施例提供了对该 反射器的高度进行特别精确估计的优点。 进一步地,在该读取步骤中,在第二时间可以读取来自该车辆的反射器的至少一 个第二反射信号,此处,该第二反射信号同样地表示与该车辆的相对速度有关的至少一项 信息,并且在该确认步骤中,使用与来自该第二反射信号的、该车辆的相对速度有关的信息 来进一步确认该反射器的高度的估计值。此处提出的该方案的此种实施例提供的优点在 于,通过处理来自同一反射器的至少一个第二反射信号来促进进一步改进和验证对反射器 高度的估计,该第二反射信号在第一反射信号之后(或之前)以时间偏移被读取和处理。 此外,检验步骤可以用于检验高度的估计值是否位于容许范围之内,如果高度的 估计值位于容许范围之外,则重复执行确定步骤和确认步骤。例如,如果高度的估计值位于 容许范围之外,则在重复的确定步骤中,针对车辆的速度确定该速度的新估计值。此处,可 以继续估计反射器的高度(例如,递归地),直到定位在车辆上的该反射器或多个反射器的 高度值再次位于容许范围之内,因此可以对反射器的高度进行尽可能精确的估计。 此处,具体而言,在检验步骤中,可以进一步检验高度的估计值是否位于道路上或 上方的0至4米之间的容许范围之内。此处,位于该容许范围之外的高度估计值意味着车辆 高度与正常状态的偏差,并且因此有利地允许推断出对反射器高度的不正确估计。 根据一个实施例,在读取步骤中,(例如,在另一时间)可以读取来自车辆的另一反 射器的至少一个另一反射信号,该至少另一反射信号表示与该车辆的相对速度有关的信 息,并且在确认步骤中,使用与来自该另一反射信号的、该车辆的相对速度有关的信息来确 认该另一反射器的高度的另一估计值。此处提出的该方案的此种实施例提供的优点在于, 例如,通过处理来自另一反射器的至少一个另一反射信号来促进进一步改进和验证对车辆 整体高度的估计,该反射信号能够在第一和第二反射信号之后以时间偏移被读取和处理。 进一步地,在检验步骤中,可以重新检验高度的估计值或高度的另一估计值是否 位于容许范围之内,如果高度的估计值和/或高度的另一估计值位于容许范围之外,则重复 执行确定步骤和确认步骤。如果高度的估计值或高度的另一估计值位于容许范围之外,则 重复确定步骤,并且针对车辆的速度确定该速度的新估计值。这可以实现对反射器高度的 非常精确的估计。 最后,在确认步骤中,可以使用发射器装置的已知高度来计算车辆反射器的高度。 有利地,此种实施例通过所确认的车辆反射器高度来促进改进车辆分类以及更准确地测量 5 CN 111742237 A 说 明 书 3/7 页 车辆速度。 此外,提出了一种用于估计车辆反射器的高度的设备,所述设备被实施成在相应 的装置中驱动和/或执行用于估计车辆反射器的高度的方法的步骤。也允许通过本发明的 呈设备形式的该实施例变型快速且有效地实现本发明的目的。 在当前情况下,设备可以理解为是指处理传感器信号并基于其输出控制信号和/ 或数据信号的电气装置。设备可以具有接口,该接口可以实施为硬件和/或软件。在硬件类 型实施例的情况下,接口可以是所谓的系统ASIC的一部分,该系统ASIC的设备功能例如是 非常不同的。然而,接口还可以是专用集成电路或至少部分地由分立部件组成。在软件类型 实施例的情况下,接口例如可以是存在于另外还有其他软件模块的微控制器上的软件模 块。 具有程序代码的计算机程序产品也是有利的,该程序代码可以存储在机器可读介 质(诸如半导体存储器、硬盘驱动器或光学存储器)上,并且当在计算机或设备上执行该程 序产品时,该程序代码用于执行根据上述实施例中的任何一个实施例的方法。 附图说明 本发明的示例性实施例在附图中仅示意性地展示,并且将在下面更详细地描述。 图1示出了根据一个示例性实施例的设备的示意图,该设备用于基于设备来估计 车辆反射器的高度; 图2示出了根据一个示例性实施例的系统结构的示意性侧视图,该系统结构用于 基于设备来估计车辆反射器的高度; 图3示出了根据一个示例性实施例的系统结构的示意性俯视图,该系统结构用于 基于设备来估计车辆反射器的高度; 图4示出了根据一个示例性实施例的坐标系,该坐标系用于说明特定时间间隔内 多个收集到的反射; 图5示出了根据一个示例性实施例的坐标系,该坐标系用于说明特定时间间隔内 多个经投影的反射; 图6示出了根据一个示例性实施例的车辆反射器对于速度估计值的高度分布的频 率直方图; 图7示出了根据一个示例性实施例的车辆反射器对于速度替代估计值的高度分布 的四个频率直方图; 图8示出了根据一个示例性实施例的多个反射的三维表示的3D表面图的视图;以 及 图9示出了根据一个示例性实施例的方法的示例性实施例的流程图,该方法用于 估计车辆反射器的高度。











