
技术摘要:
本发明提供了远程操作载具和用于储存仓的储存系统。本发明关于适合于自下伏储存系统拾取储存仓(2)的远程操作载具(1)。载具包含位于或至少部分地在载具的滚动手段(10,11)之内的驱动手段(5,19),在第一方向(X)或第二方向(Y)中的任一方向上向载具提供滚动机组特定的驱动 全部
背景技术:
已知用于自储存系统拾取储存仓的远程操作载具。相关现有技术储存系统的详细 说明呈现于WO 98/49075中,且适合于此储存系统的现有技术载具的细节详细揭示于挪威 专利NO 317366中。此现有技术储存系统包含三维储存栅格,此三维储存栅格包含在彼此之 上堆栈直至某一高度的储存仓。储存栅格通常经建构为藉由顶轨互连的铝栏(aluminium column),多个远程操作载具,或机器人经布置至此等铝栏上以横向地移动。每一载具装备 有用于拾取、承载,及置放储存在储存栅格中的仓的提升机构,以及用于供应电力至并入马 达的载具的充电式电池。载具典型地经由无线链路与控制系统通讯且当需要时(典型地,在 夜里)于充电站处再充电。 现有技术储存系统的实例图示于图1中。储存系统3包括多个载具或机器人1,此多 个载具或机器人1经配置以在专用支撑轨13上以X轴方向及Y轴方向(见笛卡尔坐标系统 100)移动,且以自仓储存栅格15之内的储存栏中接收储存箱2。现有技术储存系统3亦可包 括专用仓提升装置50,此仓提升装置经布置以在储存系统3的顶部位准处自载具1接收储存 箱2,且以垂直方向向下输送储存箱2至输送站,或埠60。 然而,对于此已知系统,各载具正在覆盖对应于两个储存栏的下伏储存系统的横 截面,从而限制同时操作载具的最大数目。 因此,本发明的目的为提供一种载具及储存系统,此载具及储存系统允许在成功 装卸储存仓期间同时操作载具的数目的显著增加。
技术实现要素:
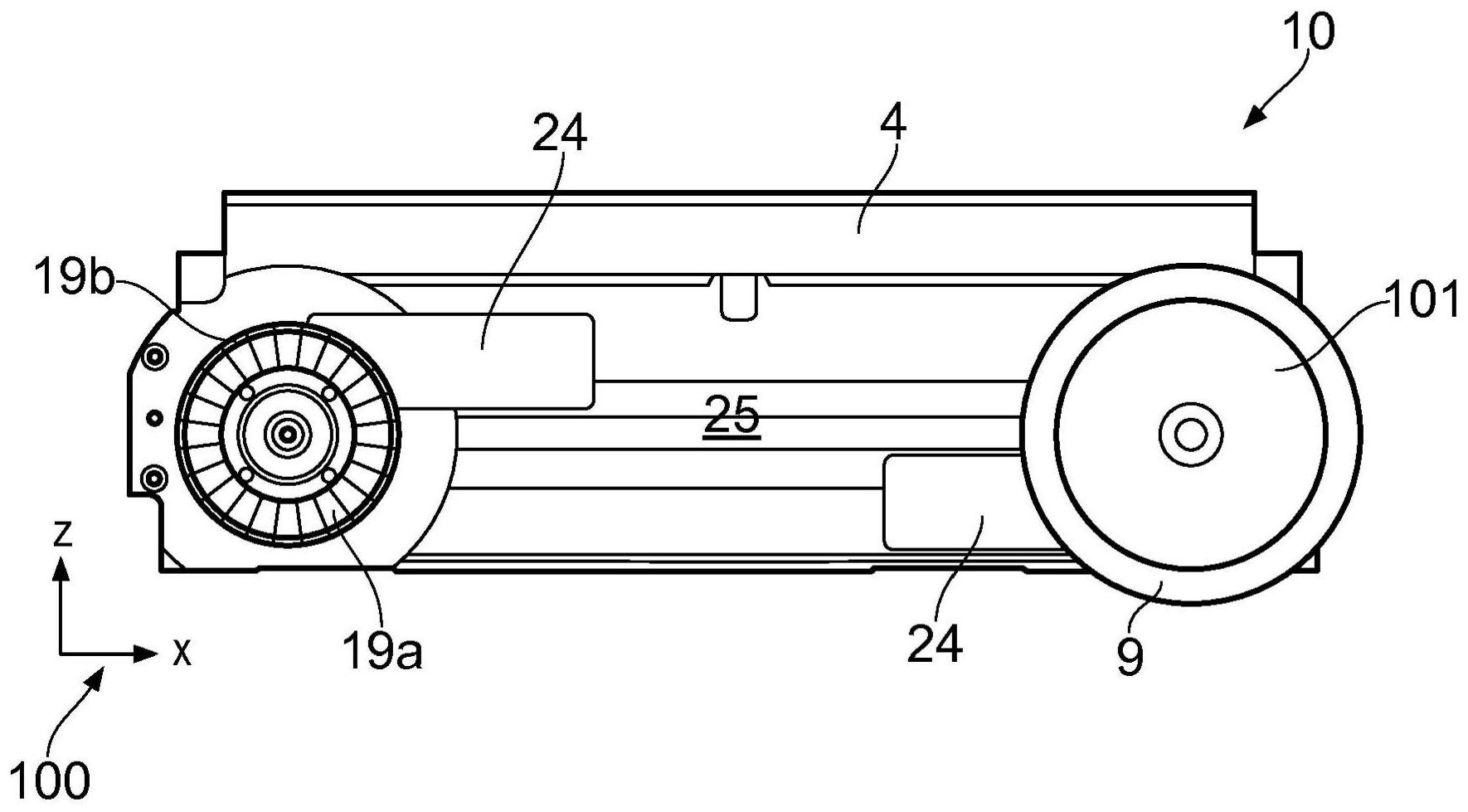
特定言之,本发明关于适合于自下伏储存系统拾取储存仓的远程操作载具,此远 程操作载具包含:载具提升装置,适合于自下伏储存系统提升储存仓;第一载具滚动手段, 包含第一滚动机组及布置于载具主体的相对面对侧壁处的第二滚动机组,允许载具在使用 期间于下伏储存系统上沿第一方向(X)的运动;及第二载具滚动手段,包含第一滚动机组及 布置于载具主体的相对面对侧壁处的第二滚动机组,允许载具在使用期间于下伏储存系统 上沿第二方向(Y)的运动,此第二方向(Y)垂直于第一方向(X),且其中此等滚动机组中的每 一者包含至少两个滚轮。第一滚动机组及第二滚动机组亦可包括皮带、链轨或任何其他机 构或机构的组合,上述各者实现在下伏储存系统上的载具向前及/或向后的运动。 载具进一步包含:第一驱动手段,位于或至少部分地在第一载具滚动手段之内且 4 CN 111573097 A 说 明 书 2/5 页 适合于在第一方向(X)上提供滚动机组特定驱动力至载具;第二驱动手段,位于或至少部分 地在第二载具滚动手段之内且适合于在第二方向(Y)上提供滚动机组特定驱动力至载具; 及马达控制电子设备,布置于各滚动机组的滚轮中两者之间的体积之内,其中马达控制电 子设备经配置以供应电力至第一载具滚动手段及第二载具滚动手段。在使用期间,第一载 具滚动手段及第二载具滚动手段中的至少一者与下伏储存系统接触。 在一有利实施例中,驱动手段中的至少一者包含使用永久磁铁的电动马达,诸如 无刷电动直流(direct current;DC)马达。 在另一个有利实施例中,第一驱动手段及第二驱动手段中的至少一者包含转子磁 铁,此转子磁铁布置于此第一驱动手段及第二驱动手段的各个载具滚动手段的外周边的内 表面处。 在另一有利实施例中,第一驱动手段及第二驱动手段中的至少一者包含定子,此 定子至少部分地、优选完全地布置在与载具滚动手段相同的旋转平面内且至少部分地、优 选完全地布置在载具主体内。旋转平面在此实施例中表示平面自载具滚动手段的旋转轴垂 直延伸。 在另一个有利实施例中,载具包含适合于测量(至少间接地测量)载具滚动手段的 至少一者的电动势(electromotive force;emf)的手段,此手段与定子及转子之一者信号 通讯,从而允许在操作期间的载具的滚动机组特定速度对准。例如,可安装反电动势测量电 路以与载具滚动手段信号通讯。可替代地或结合地使用霍尔传感器。 在另一有利实施例中,载具包含(至少间接地)连接至第一载具滚动手段及第二载 具滚动手段中的至少一者的旋转编码器,从而允许在操作期间的角位置反馈。此旋转编码 器适合于将载具滚动手段的角运动转换为模拟或数字代码。旋转编码器(或轴状解码器)可 具有绝对旋转编码器型及/或绝对多匝编码器型。此绝对旋转编码器可为机械编码器、光学 编码器、磁性编码器及电容式编码器中的至少一者。此外,绝对多匝编码器可为电池供电多 匝编码器、齿轮多匝编码器,及自供电多匝编码器中的至少一者。 在另一有利实施例中,旋转编码器为旋转编码器盘,此旋转编码器盘布置在第一 载具滚动手段及第二载具滚动手段中的至少一者的外周边之内,优选的在外周边与转子磁 铁之间。 在另一有利实施例中,载具进一步包含适用于测量第一载具滚动手段及第二载具 滚动手段中的至少一者的加速度的手段,此手段与定子信号通讯。此手段优选地包含一或 多个压电传感器,例如来自PCBTM Piezotronics的加速计。一或多个感应传感器可用作压电 传感器的替代,或结合压电传感器一起使用。 在另一有利实施例中,各滚动机组包含至少两个滚轮,且载具进一步包含马达控 制电子设备,此马达控制电子设备布置在各滚动机组的滚轮中两者之间的体积之内。此马 达控制电子设备在此实施例中经配置以供应电力至第一载具滚动手段及第二载具滚动手 段,且亦可优选地传输通讯信号。 在另一有利实施例中,第一载具滚动手段包含在第一方向上具有此第一载具滚动 手段的旋转方向的四个X轴滚轮,且第二载具滚动手段包含在第二方向上具有此第二载具 滚动手段的旋转方向的四个Y轴滚轮,其中X轴滚轮中的每一者及Y轴滚轮中的每一者经分 别驱动地连接至第一驱动手段及第二驱动手段。滚轮中的每一者优选地包含:多个转子磁 5 CN 111573097 A 说 明 书 3/5 页 铁(例如,以转子磁铁圆盘的形式),布置在滚轮外周边的内表面之内;及多个定子(例如,以 定子圆盘的形式),至少部分地(例如完全地)布置在载具主体之内,优选地在具有滚轮旋转 轴的位置的相同或近乎相同高度。在此文件中的高度代表在使用期间相距下伏储存系统的 最高点的距离。此等定子包括绕组及轭两者,且定子磁场绕组正在遵循滚轮的外周边。 在另一有利实施例中,驱动手段的至少一部分,且优选所有经布置于滚轮外周边 之内。 例如,当应用四个皮带以在X轴方向及Y轴方向上驱动本发明的载具时,总共四个 马达可与四个皮带中的每一皮带以可操作啮合方式安装,从而达成所要滚动机组特定驱动 力。同样地,当应用四个皮带以在X轴方向及Y轴方向上驱动载具时,总共八个马达可与八个 滚轮中的每一滚轮以可操作啮合安装,从而达成所要滚动机组特定驱动力。 本发明亦关于适合于储存仓的储存系统。储存系统包含仓储存结构,此仓储存结 构包含多个储存栏,其中每一储存栏经布置以根据上述实施例中的任一实施例容纳储存仓 的垂直堆栈及远程操作载具。 在以下描述中,引入特定细节以提供所主张载具及储存系统的实施例的透彻理 解。然而,本领域的普通技术人员将认识到,此等实施例可在无特定细节中之一或多者的情 况下实践,或与其他元件、系统等等一起实践。在其他情况下,未图示或未详细描述众所熟 知的结构或操作,以避免模糊所揭示实施例的态样。 附图说明 图1为包含栅格及多个远程操作载具/机器人的现有技术储存系统的透视图; 图2为根据本发明的一个实施例的自远程操作载具上方所见的透视图; 图3为自下方所见的图2中的载具的透视图; 图4为沿着载具的一个主要定向所见的图2及图3中的载具的剖视图; 图5为根据本发明的一个实施例的自上方所见的储存系统的透视图,其中本发明 的载具经图示为直接地布置在五个相邻储存栏上方; 图6A及图6B为图5中的储存系统的横剖面图,此图图示沿着载具的两个主要方向 的在相邻栏上方的本发明的载具; 图7为根据本发明的一个实施例的构成载具的一部分的滚动机组的透视图; 图8A及图8B为根据本发明的一个实施例的构成载具的一部分的滚轮的透视图;及 图9A、图9B及图9C图示滚轮中的一者已移除的图7中的滚动机组,其中图9A及图9B 为沿载具的每一主要定向所见的滚动机组的横剖面图,且图9C为其中滚轮已移除的滚动机 组的一部分的透视侧视图。











