
技术摘要:
本发明公开了一种动态化人体检测调节跟随移动座椅及其控制系统,涉及智能家居设备领域。本发明中:第二支撑导杆上端侧固定连接有第三固定盘板;第三固定盘板上固定安装有主升降驱动装置;主升降驱动装置的输出端上连接有活动穿过第三固定盘板的驱动升降杆;驱动升降杆 全部
背景技术:
智能家居通过物联网技术将家中的各种设备连接到一起,提供家电控制、照明控 制、电话远程控制、室内外遥控、防盗报警、环境监测、暖通控制、红外转发以及可编程定时 控制等多种功能和手段。 在人们的智慧家居生活中,在阳台上观赏夜景、在书房中查阅书籍过程中,可能需 要随时的坐下或站立起来,或是进行一定距离的走动,这时,阳台、书房等场景内座椅、板凳 等就会较人们有较大间距距离,人们需要坐下时,还需要重新回到原来座椅的位置,或是将 座椅搬到人们想要坐立的区域内;尤其是一些图书馆、阅览室场景内,人们的走动范围较 大,在人们拿到书本时,需要坐下查看里面的内容时,座椅的距离较远,人们有时不想返回 座椅原来的位置,只能站立查看书本内容;由于每个人的身高都存在差异,固定化的座椅高 度,会使得人们的坐姿无法达到较为舒适的位置,所以在将座椅动态化跟随人体移动的同 时,根据人体身高的不同,高效稳定的进行座椅的高度调节,成为需要解决的问题。
技术实现要素:
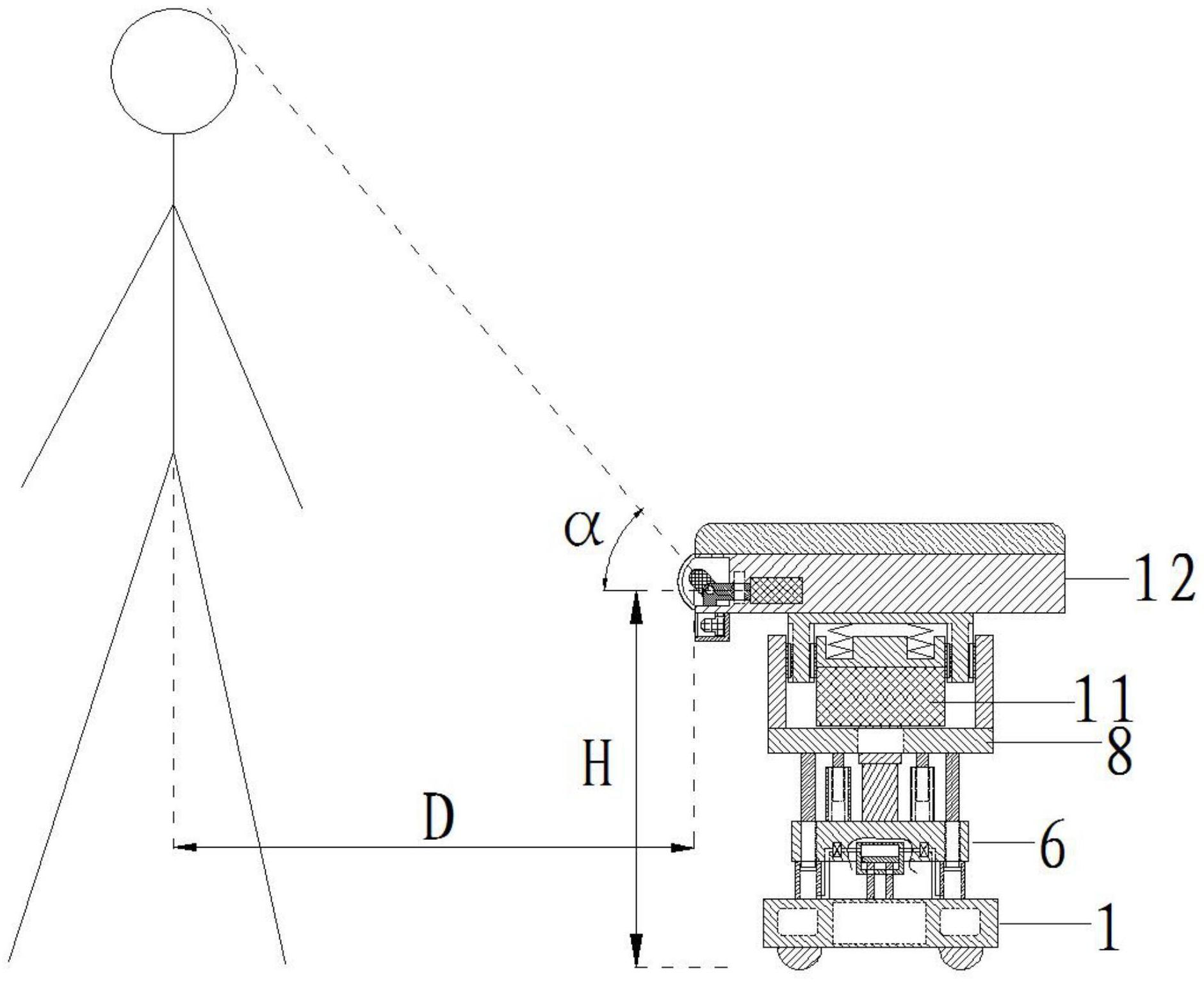
本发明的目的在于提供一种动态化人体检测调节跟随移动座椅及其控制系统,通 过水平化红外测距,驱动座椅在设定的距离内跟随人体活动,并通过动态化检测当前人体 的具体身高,通过稳定的座椅面高度调节以及调节后的座椅面稳定支撑,使得当前人体的 坐姿更加舒适。 为解决上述技术问题,本发明是通过以下技术方案实现的: 本发明为一种动态化人体检测调节跟随移动座椅,包括第一基底安装座,第一基 底安装座内设置有内置电源,第一基底安装座的底部设置有若干活动行走轮,第一基底安 装座内装设有用于驱动活动行走轮动作的行走驱动装置,第一基底安装座上侧固定连接有 若干第一固定液压管;第一固定液压管上侧固定连接有第二基体安装座;第二基体安装座 上活动装设有若干第二支撑导杆;第二支撑导杆上端侧固定连接有第三固定盘板;第三固 定盘板上固定安装有主升降驱动装置;主升降驱动装置的输出端上连接有活动穿过第三固 定盘板的驱动升降杆;驱动升降杆的下侧端与第二基体安装座固定连接;第三固定盘板上 侧固定设有位于主升降驱动装置环侧的第三边围板;主升降驱动装置上侧配合固定安装有 第四内部基盘;主升降驱动装置/第四内部基盘的上方/外围设有第四上位架板;第四上位 架板的上侧固定安装有第五上侧安装座;第五上侧安装座的上侧铺装有座椅坐垫面板。 第五上侧安装座的边围侧开设有上座端侧腔体;上座端侧腔体内设置有第一红外 测距机构;第五上侧安装座内设置有与第一红外测距机构配合连接的旋转调节组件;第五 上侧安装座内设置有与旋转调节组件驱动配合连接的第一驱动装置;第五上侧安装座内设 5 CN 111588222 A 说 明 书 2/6 页 置与与旋转调节组件驱动配合连接的角度传感机构;第五上侧安装座下侧面板的边沿位置 上固定设有第二红外固定壳体;第二红外固定壳体内设有第二红外测距机构。 第四上位架板的下部设有与主升降驱动装置/第四内部基盘、第三边围板相配合 的圆环板;第四上位架板下部的圆环板外侧和内侧都开设有若干第四限位导槽;主升降驱 动装置/第四内部基盘的外围侧、第三边围板的内围侧都设有与第四上位架板上的第四限 位导槽相配合的第四滑动导板。 第一固定液压管内固定开设有第一液压内腔;第二支撑导杆的下端活动安装在第 一固定液压管的第一液压内腔内;第二支撑导杆的下端设置有与第一固定液压管内的第一 液压内腔相配合的第二内端活塞;第二基体安装座的下部固定安装有主液压机构;主液压 机构内开设有主液压内腔;第一基底安装座上侧固定连接有若干第七固定杆;第七固定杆 穿过主液压机构的外部壳体;第七固定杆的上端安装有与主液压机构内主液压内腔相配合 的主液压内部活塞;主液压机构/主液压内腔与第一固定液压管/第一液压内腔之间连通有 液压连管;液压连管的部分管体位于第二基体安装座内;第二基体安装座内设置有与液压 连管配合安装的液压电磁阀;第二基体安装座上侧固定设有若干辅助导向套管;辅助导向 套管内开设有辅助套管凹槽;其中一个辅助导向套管的辅助套管凹槽的槽壁面上嵌设有光 电监测机构;第三固定盘板的下侧固定连接有与辅助导向套管上的辅助套管凹槽相配合的 辅助升降连杆。 作为本发明的一种优选技术方案,第五上侧安装座的上座端侧腔体开口侧设置有 若干第一外围防撞格栅柱;第一红外测距机构的探测方位/线上无第一外围防撞格栅柱;第 二红外固定壳体的开口侧设置有若干第二外围防撞格栅柱;第二红外测距机构的探测方 位/线上无第二外围防撞格栅柱。 作为本发明的一种优选技术方案,第四内部基盘上开设有若干第四基盘凹槽;第 四内部基盘的第四基盘凹槽内装设有用于弹性支撑第四上位架板的缓冲弹性体;主升降驱 动装置/第四内部基盘外围侧、第三边围板内围侧的第四滑动导板上都设置有若干与第四 限位导槽接触配合的第四内侧滚体。 作为本发明的一种优选技术方案,第二基体安装座上开设有与第二支撑导杆相配 合的第二基体导槽;第三固定盘板上开设有与驱动升降杆相配合的驱动升降通槽。 作为本发明的一种优选技术方案,第一固定液压管与第二基体安装座相连接的位 置处设有相应的O型密封圈;主液压机构与第七固定杆配合连接的通槽位置处设有相应的O 型密封圈;若干辅助导向套管位于驱动升降杆与若干第二支撑导杆之间。 一种动态化人体检测调节跟随移动座椅的控制系统,其特征在于: 控制系统包括对人体高度进行传感检测部分:第二红外测距机构进行横向/水平 的距离传感检测,对座椅与人体之间的距离进行检测;第一驱动装置通过旋转调节组件对 第一红外测距机构的倾斜角度进行调节,在第一红外测距机构的动态调节过程中,第一红 外测距机构对当前人体头部最高位置进行传感检测;角度传感机构对第一红外测距机构所 进行的角度调节进行监测。 控制系统包括对座椅进行升降控制:主升降驱动装置动作时,驱动升降杆将第二 支撑导杆/第三固定盘板以上的部分进行升降,其中一个辅助导向套管内的光电监测机构 对辅助升降连杆的升降位置进行传感监测,对座椅升降状态/位置进行对应传感监测;主升 6 CN 111588222 A 说 明 书 3/6 页 降驱动装置动作时/座椅调节过程中,液压连管上的液压电磁阀动作开阀,随着第二支撑导 杆的上下升降,液压流体在第一液压内腔、主液压内腔之间流通;在主升降驱动装置无动 作/座椅调整好后,液压连管上的液压电磁阀失电关阀,液压连管阻隔液压流动/液压变化, 对调整好后的座椅进行支撑。 控制系统包括第二红外测距机构对座椅与人体之间的间距进行实时传感检测以 及实时人/座间距调节。 作为本发明的一种优选技术方案,设第二红外测距机构检测到座椅与人体之间的 间距参数为R;设系统内设定的座椅与人体之间最大间距为Rmax;当R≤Rmax时,座椅底部的 行走驱动装置不驱动活动行走轮靠近人体;当R>Rmax时,座椅底部的行走驱动装置驱动活 动行走轮靠近人体,满足R≤Rmax时,行走驱动装置停止动作。 作为本发明的一种优选技术方案,设座椅面板/第一红外测距机构的初始高度为 H;设人体与座椅/第二红外测距机构之间的水平间距为D;设第一红外测距机构对人体头部 进行探测定位的仰角角度为α;则人体身高参数为Hren=H D·tanα。 根据获取到的人体参数Hren,系统内设定相应的人体高度与座椅高度参数对照信 息,对座椅面板高度进行调节,采用主升降驱动装置驱动座椅面板升高/降低T参数距离。 本发明具有以下有益效果: 1、本发明采用第一红外测距机构和第二红外测距机构对人体高度参数进行传感 检测,分析当前人体高度,并通过主升降驱动装置反向推动座椅坐垫面板进行升降,匹配当 前人体身高,使得当前人体的坐姿更加舒适; 2、本发明通过设置第一驱动装置、旋转调节组件,对第一红外测距机构进行旋转 调节,并通过角度传感机构对第一红外测距机构的角度状态进行实时监测,有效的对当前 人体的头部位置仰角进行采集,配合采集到水平间距参数,较为高效精准的完成人体身高 参数的计算; 3、本发明通过设置辅助导向套管,在辅助导向套管内开设辅助套管凹槽,并在辅 助套管凹槽内设置用于传感辅助升降连杆位置的光电监测机构,对座椅实时的升降状态/ 参数进行传感监测;辅助升降连杆与辅助导向套管之间的配合也一定程度对第二支撑导杆 的升降进行辅助支撑; 4、本发明通过设置主液压机构,并设置若干第一固定液压管,第二支撑导杆的升 降联动主液压机构与第一固定液压管之间的液压状态变化,并在座椅高度调整好后采用液 压电磁阀对液压状态进行锁定,高效的完成液压化座椅支撑操作; 5、本发明中在第四上位架板与第四内部基盘之间设置缓冲弹性体,并在第四上位 架板与第三边围板、第四内部基盘等机构之间设置相互配合导槽、滚子结构,使得人们在坐 下时,座椅上部能够一定程度的稳定化缓冲支撑人体的坐冲击。 当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的 附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领 域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附 7 CN 111588222 A 说 明 书 4/6 页 图。 图1为本发明中动态化人体检测调节跟随移动座椅与人体间(参数)的结构示意 图; 图2为本发明中动态化人体检测调节跟随移动座椅的结构示意图; 图3为图2中A处局部放大的结构示意图; 图4为图2中B处局部放大的结构示意图; 图5为图2中C处局部放大的结构示意图; 图6为本发明中动态化人体检测调节跟随移动座椅的系统逻辑示意图; 附图中,各标号所代表的部件列表如下: 1-第一基底安装座;2-内置电源;3-行走驱动装置;4-活动行走轮;5-第一固定液 压管;6-第二基体安装座;7-第二支撑导杆;8-第三固定盘板;9-第三边围板;10-第四上位 架板;11-主升降驱动装置;12-第五上侧安装座;13-座椅坐垫面板;14-上座端侧腔体;15- 第一红外测距机构;16-旋转调节组件;17-第一外围防撞格栅柱;18-第二红外固定壳体; 19-第二红外测距机构;20-第二外围防撞格栅柱;21-第一驱动装置;22-角度传感机构;23- 第四内部基盘;24-第四基盘凹槽;25-缓冲弹性体;26-第四限位导槽;27-第四滑动导板; 28-第二基体导槽;29-第一液压内腔;30-第二内端活塞;31-主液压机构;32-主液压内腔; 33-第七固定杆;34-主液压内部活塞;35-液压连管;36-液压电磁阀;37-驱动升降杆;38-驱 动升降通槽;39-辅助导向套管;40-辅助套管凹槽;41-光电监测机构;42-辅助升降连杆; 43-第四内侧滚体。











