
技术摘要:
本发明公开了一种单帧结构光场三维成像方法和系统,其中,方法包括:投影装置投射条纹图案至被测物体上;光场成像装置记录经被测物体表面反射的结构光场;获取所述结构光场的局部强度差;对所述结构光场进行希尔伯特变换,获取希尔伯特变换后的结构光场的局部强度差; 全部
背景技术:
随着电子信息技术的发展,图像采集和显示技术逐渐成为人类视觉信息获取过程 中的重要载体,图像采集和显示技术极大的拓展了人类的视野。 现实的物理世界是三维的,现有的二维图像采集及显示技术无法记录和重现出场 景的三维深度感。三维成像突破了二维采集及显示技术的缺陷,真实的记录和重现出三维 场景,使得通过采集和显示技术传递的信息更加真实直观,因此具有重要意义。 光场成像可以记录光线的四维空间-角度信息,其中,角度信息能够提供深度线 索,由此可以进行场景深度估计,实现单帧深度传感。然而,这种深度估计属于被动光场深 度估计,其依赖于所记录的图像结构,易受探测噪声和遮挡、重复纹理和环境光照变化等测 量环境的影响。 相较之下,结构照明能够提供对强度不敏感的相位编码信息。相位信息受场景深 度的调制,通过相位信息可以解调出场景的深度信息。傅里叶变换法是一种经典的单帧相 位计算方法,然而该方法对噪声和不连续深度较为敏感。
技术实现要素:
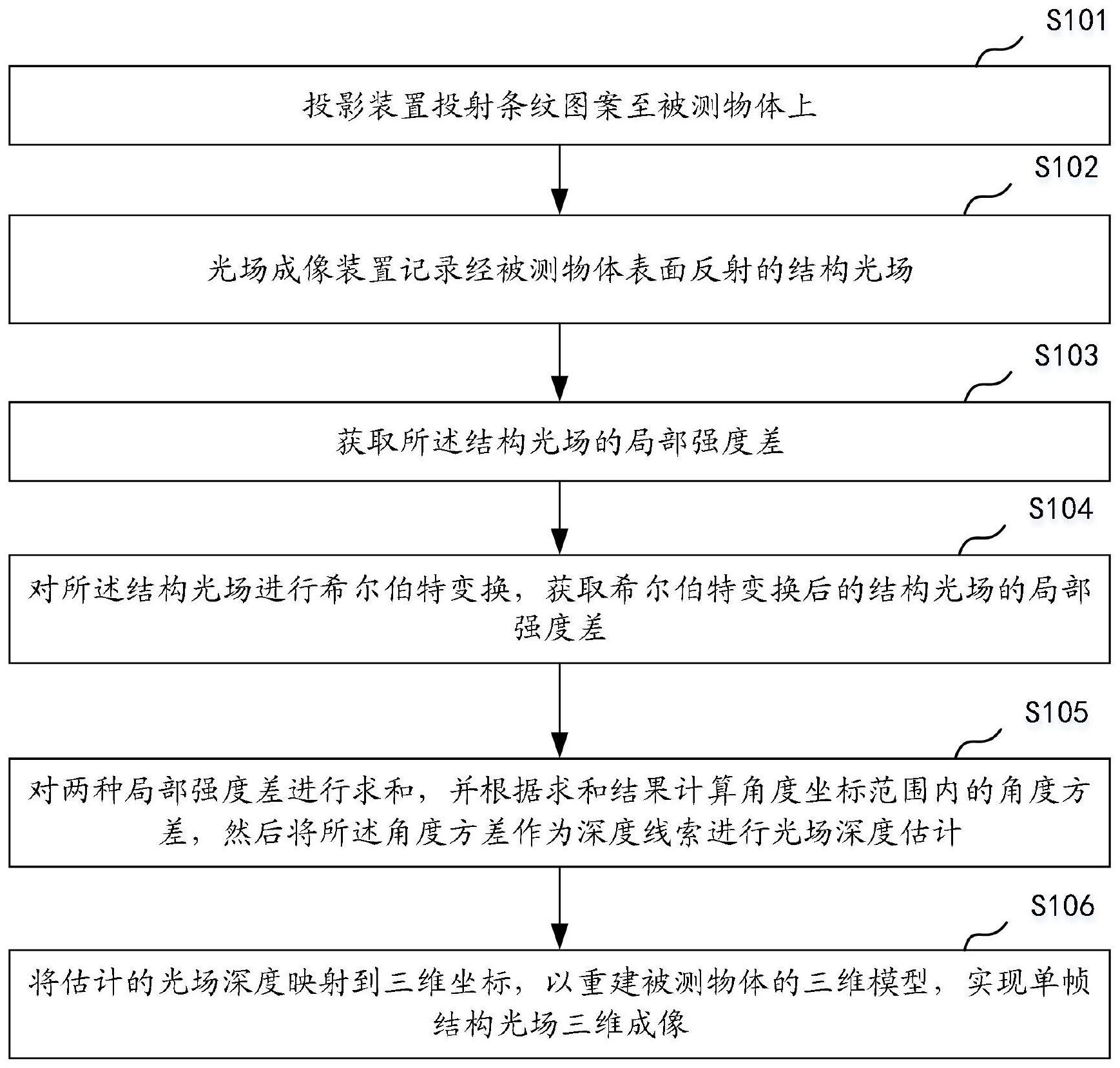
本发明的目的是提供一种单帧结构光场三维成像方法和系统,旨在提高三维成像 的效率和鲁棒性。 本发明实施例提供一种单帧结构光场三维成像方法,其包括: 投影装置投射条纹图案至被测物体上; 光场成像装置记录经被测物体表面反射的结构光场; 获取所述结构光场的局部强度差; 对所述结构光场进行希尔伯特变换,获取希尔伯特变换后的结构光场的局部强度 差; 对两种局部强度差进行求和,并根据求和结果计算角度坐标范围内的角度方差, 然后将所述角度方差作为深度线索进行光场深度估计; 将估计的光场深度映射到三维坐标,以重建被测物体的三维模型,实现单帧结构 光场三维成像。 进一步,所述的结构光场包含被测物体反射的光线的位置信息和方向信息,所述 的结构光场表示为L(s,u),其中s=(s,t)T表示空间坐标,u=(u,v)T表示角度坐标。 进一步,所述获取所述结构光场的局部强度差,包括: 对于指定的空间坐标si,获取角度坐标范围内相对中心角度坐标对称的坐标对的 强度:l1和l2,以及中心角度坐标的强度l0; 4 CN 111583323 A 说 明 书 2/7 页 按下式计算所述结构光场的局部强度差:Δ1=(l1 l 2 22-2l0) 和Δ2=(l1-l2) 。 进一步,所述对所述结构光场进行希尔伯特变换,获取希尔伯特变换后的结构光 场的局部强度差,包括: 将所述结构光场L(s,u)进行希尔伯特变换后得到变换后的结构光场LH(s,u); 对于指定的空间坐标si,获取角度坐标范围内相对中心角度坐标对称的坐标对的 强度: 和 以及中心角度坐标的强度 按下式计算希尔伯特变换后结构光场的局部强度差: 和 进一步,所述对两种局部强度差进行求和,并根据求和结果计算角度坐标范围内 的角度方差,然后将所述角度方差作为深度线索进行光场深度估计,包括: 按下式对两种局部强度差进行求和: 计算角度坐标范围内的角度方差; 将所述角度方差作为深度线索进行光场深度估计。 进一步,所述将估计的光场深度映射到三维坐标,以重建被测物体的三维模型,实 现单帧结构光场三维成像,包括: 将估计的光场深度映射到三维坐标; 通过计算的三维点云重建被测物体的三维模型,实现单帧结构光场三维成像。 本发明实施例还提供一种单帧结构光场三维成像系统,其包括投影装置、光场成 像装置、计算装置,所述计算装置包括:第一局部强度差获取单元、第二局部强度差获取单 元、光场深度估计单元和三维成像单元; 所述投影装置,用于投射条纹图案至被测物体上; 所述光场成像装置,用于记录经被测物体表面反射的结构光场; 所述第一局部强度差获取单元,用于获取所述结构光场的局部强度差; 所述第二局部强度差获取单元,用于对所述结构光场进行希尔伯特变换,获取希 尔伯特变换后的结构光场的局部强度差; 所述光场深度估计单元,用于对两种局部强度差进行求和,并根据求和结果计算 角度坐标范围内的角度方差,然后将所述角度方差作为深度线索进行光场深度估计; 所述三维成像单元,用于将估计的光场深度映射到三维坐标,以重建被测物体的 三维模型,实现单帧结构光场三维成像。 进一步,所述的结构光场包含被测物体反射的光线的位置信息和方向信息,所述 的结构光场表示为L(s,u),其中s=(s,t)T表示空间坐标,u=(u,v)T表示角度坐标;所述第 一局部强度差获取单元,包括: 第一坐标获取单元,用于对于指定的空间坐标si,获取角度坐标范围内相对中心 角度坐标对称的坐标对的强度:l1和l2,以及中心角度坐标的强度l0; 第一局部强度差计算单元,用于按下式计算所述结构光场的局部强度差:Δ1=(l1 l2-2l0)2和Δ2=(l1-l2)2。 进一步,所述第二局部强度差获取单元,包括: 5 CN 111583323 A 说 明 书 3/7 页 希尔伯特变换单元,用于将所述结构光场L(s,u)进行希尔伯特变换后得到变换后 的结构光场LH(s,u); 第二坐标获取单元,用于对于指定的空间坐标si,获取角度坐标范围内相对中心 角度坐标对称的坐标对的强度: 和 以及中心角度坐标的强度 第二局部强度差计算单元,用于按下式计算希尔伯特变换后结构光场的局部强度 差: 和 进一步,所述光场深度估计单元包括: 求和单元,用于按下式对两种局部强度差进行求和: 角度方差计算单元,用于计算角度坐标范围内的角度方差; 估计单元,用于将所述角度方差作为深度线索进行光场深度估计。 本发明实施例提供了一种单帧结构光场三维成像方法和系统,该方法包括:投影 装置投射条纹图案至被测物体上;光场成像装置记录经被测物体表面反射的结构光场;获 取所述结构光场的局部强度差;对所述结构光场进行希尔伯特变换,获取希尔伯特变换后 的结构光场的局部强度差;对两种局部强度差进行求和,并根据求和结果计算角度坐标范 围内的角度方差,然后将所述角度方差作为深度线索进行光场深度估计;将估计的光场深 度映射到三维坐标,以重建被测物体的三维模型,实现单帧结构光场三维成像,该方法通过 对结构照明下记录的结构光场的强度信息进行变换和处理,获取结构光场的局部强度差的 角度方差,由此作为深度线索在结构光场中估计场景深度,最终通过深度图场景进行三维 重建,本发明实施例无需提取结构光场的相位编码信息,即可实现高效、鲁棒的单帧结构光 场三维成像。 附图说明 为了更清楚地说明本发明实施例技术方案,下面将对实施例描述中所需要使用的 附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普 通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。 图1为本发明实施例提供的单帧结构光场三维成像方法的流程图; 图2为本发明实施例中被测物体的结构光场示意图; 图3a为本发明实施例中被测物体的估计深度图; 图3b为本发明实施例中被测物体的重建的三维模型。











