
技术摘要:
本发明涉及一种机器人及负载口独立控制的高低压切换型液压机械腿,属于机器人技术领域。该机械腿包括相邻接的两腿杆、控制执行器及用于驱使该两腿杆相对摆动的液压缸;控制执行器包括均为三位三通阀的高压端阀、第一低压端阀及第二低压端阀;高压端阀的双管接头中的一 全部
背景技术:
多足步行机器人作为一种能够替代人类完成危险、复杂及高强度工作的机器人, 获得较为广泛地发展与应用。对于多足步行机器人而言,其主要驱动方式有电驱动与液压 驱动。 与电驱动式机器人相比,采用液压作为驱动方式的机器人具有功率密度大、负载 高、高带宽、响应快及抗扰动能力强等优势。例如,本申请人申请且已公开的公布号为 CN109501881A的专利文献所公开了一种四足机器人,如其附图所示,其两只前腿均包括由 关节铰接的大腿杆与小腿杆,及用于驱使该两腿杆相对绕关节摆动的液压缸。此外,申请人 在公开号为CN104029745A公开了一种液压机械腿,其可广泛应用于四足或六足机器人。 当前,由于液压缸通常为使用单个电液比例阀控制液压缸的动作,导致其进出阀 口存在耦合,而限制了系统的响应、提高整体系统的能量消耗;而且在工作过程中,液压机 械腿需要在支撑相与摆动相之间切换,且在支撑态需要承担机器人自重及相关负载,导致 需向其供给高压油液,而在摆动相时,仅需供给低压油液即可,此时阀口存在大量节流损 失,使得能量利用率低;此外,为了满足全程运动需求,目前定转速泵源输出流量要求大于 所需的平均流量,但是机器人在运动过程中所需流量具有不均匀的特点,导致液压机器人 在运动过程中存在大量的溢流损失,进一步地降低了能量利用率。
技术实现要素:
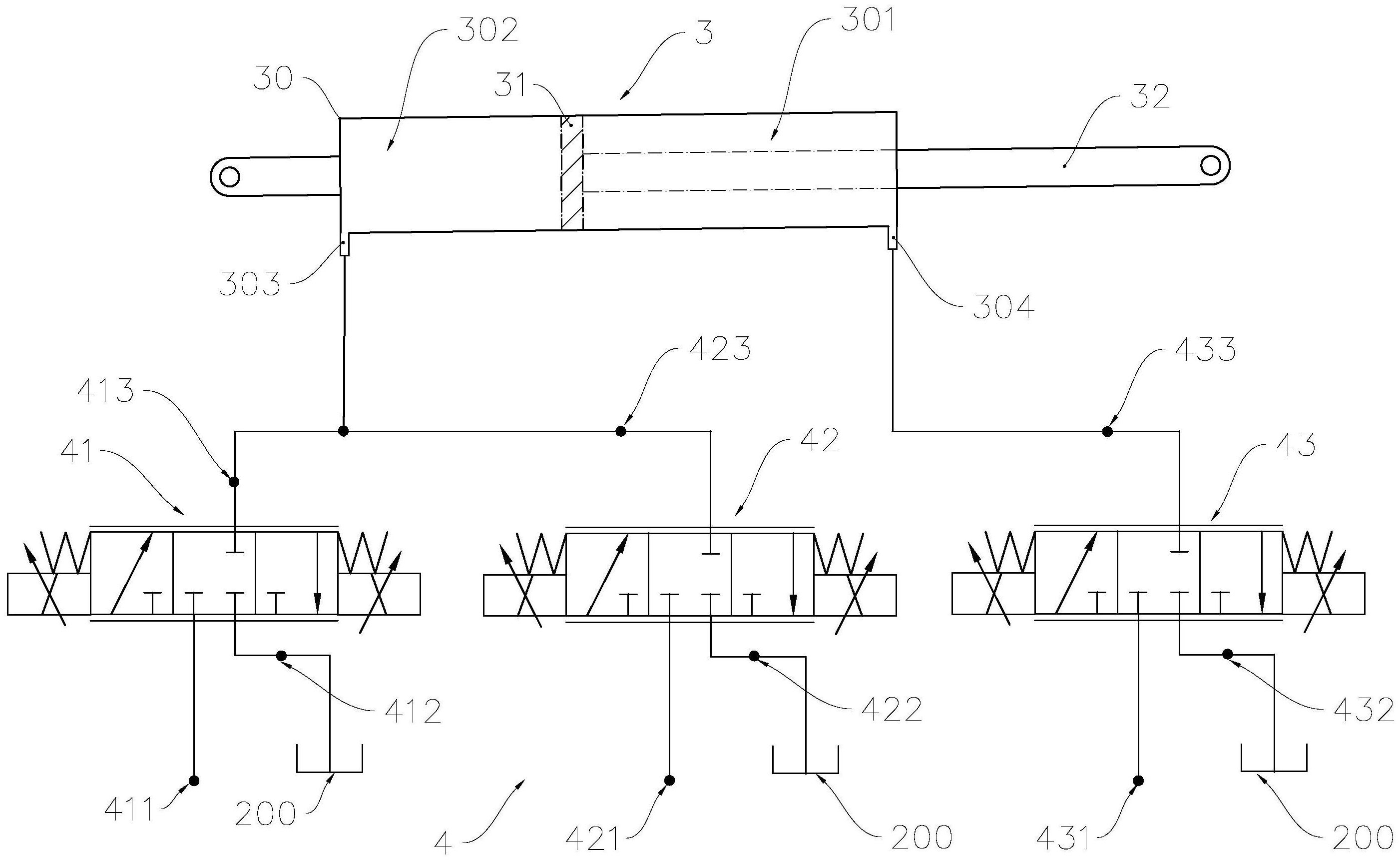
本发明的主要目的是提供一种负载口独立控制的高低压切换型液压机械腿,以解 决目前进出阀口存在耦合的问题,从而有效地提高系统的响应,并降低系统的整体能量消 耗的同时,有效地适应支撑相与摆动相之间所需压力差,以减少节流损失,从而有效地提高 其能量利用率; 本发明的另一目的是提供一种基于上述液压机械腿所构建的多足步行机器人,以 能有效地提高该机器人的能量利用率; 本发明的再一目的是提供一种负载口独立控制的高低压切换型液压机械腿,能有 效地减少运动过程中的溢流损失,而进一步提高其能量的利用率。 为了实现上述主要目的,本发明提供的负载口独立控制的高低压切换型液压机械 腿包括第一腿杆,与第一腿杆由连接关节铰接的第二腿杆,用于驱使两相邻接腿杆绕连接 关节摆动的液压缸,及控制执行器;液压缸的缸体上设有无杆油腔接口与有杆油腔接口;控 制执行器包括高压端三位三通阀、第一低压端三位三通阀及第二低压端三位三通阀;高压 端三位三通阀的双管接头中的一者用于与油箱的进口连通,另一者用于与高压液压源连 通;第一低压端三位三通阀的双管接头中的一者用于与低压液压源连通,另一者用于与所 4 CN 111608972 A 说 明 书 2/5 页 述油箱连通,其单管接头与高压端三位三通阀的单管接头通过三通管结构与无杆油腔接口 连通;第二低压端三位三通阀的双管接头的一者与低压液压源连通,另一者用于与油箱连 通,其单管接头与有杆油腔接口连通。 基于上述方案中对控制执行器结构的改进,具体为采用三个三位三通阀替代现有 单个电液比例阀,且三个三位三通阀中一个构成高压端控制阀,另两个构成低压端控制阀; 从而在工作过程中,从而可对负载口进行独立控制,从而可有效地解决目前进出阀口存在 耦合的问题,以提高系统的响应,并降低系统的整体能量消耗;此外,基于该控制执行器,能 有效地利用高低压液压源为该机械腿在运动过程中的支撑相与摆动相提供适宜的压力,即 采用高低压两级供油方式,而能有效地降低阀口节流损失。 具体的方案为高压端三位三通阀、第一低压端三位三通阀及第二低压端三位三通 阀均为比例阀。 为了实现上述另一目的,本发明提供的机器人包括躯体、液压机械腿及液压源;液 压机械腿包括第一腿杆,与第一腿杆由连接关节铰接的第二腿杆,用于驱使相邻两腿杆绕 连接关节摆动的液压缸,及控制执行器;液压缸的缸体上设有杆油腔接口与无杆油腔接口; 控制执行器包括高压端三位三通阀、第一低压端三位三通阀及第二低压端三位三通阀;液 压源具有低液压输出口与高液压输出口;高压端三位三通阀的双管接头中的一者与油箱的 进口连通,另一者与高液压输出口连通;第一低压端三位三通阀的双管接头中的一者与低 液压输出口连通,另一者与油箱连通,其单管接头与高压端三位三通阀的单管接头通过三 通管结构与无杆油腔接口连通;第二低压端三位三通阀的双管接头的一者与低液压输出口 连通,另一者与油箱连通,其单管接头与有杆油腔接口连通。 基于上述方案中对其液压机械腿上的控制执行器的结构进行改进,具体为采用三 个三位三通阀替代现有单个电液比例阀,且三个三位三通阀中一个构成高压端控制阀,另 两个构成低压端控制阀;从而在工作过程中,从而可对负载口进行独立控制,从而可有效地 解决目前进出阀口存在耦合的问题,以提高系统的响应,并降低系统的整体能量消耗;此 外,基于该控制执行器,能有效地利用高低压液压源为该机械腿在运动过程中的支撑相与 摆动相提供适宜的压力,即采用高低压两级供油方式,而能有效地降低阀口节流损失。 具体的方案为高压端三位三通阀、第一低压端三位三通阀及第二低压端三位三通 阀均为比例阀。 优选的方案为液压源包括高压油泵、用于驱动高压油泵的高压油泵驱动电机、低 压油泵及用于驱动低压油泵的低压油泵驱动电机;高液压输出口与高压油泵的泵出口连 通,低液压输出口与低压油泵的泵出口连通。 进一步的方案为高液压输出口与高压油泵的泵出口之间的管路上连接有高压溢 流阀,低液压输出口与低压油泵的泵出口之间的管路上连接有低压溢流阀。从而可简单、低 成本地实现出高低压两级供油方式。 进一步的方案为在低液压输出口与高液压输出口上均连接有用于对该输出口的 输出液压进行监测的压力监测器。更精确地对泵的输出压力进行控制。 为了实现上述再一目的,本发明提供的优选方案为高压油泵驱动电机与低压油泵 驱动电机均为转速可调电机;在泵驱动电机上均布设有用于对其转速进行监测的转速监测 器。基于该结构设置,可实现液压泵恒压变转速控制,而能低液压系统的溢流损失,即可进 5 CN 111608972 A 说 明 书 3/5 页 一步地提高该系统的能量利用率。 附图说明 图1为本发明实施例中液压机械腿的机械结构示意图; 图2为本发明实施例中液压机械腿的油路结构示意图; 图3为本发明实施例中液压源的管路结构示意图。











