
技术摘要:
本申请提供一种转向角度检测方法、装置及系统,其中转向角度检测方法包括:接收激光雷达发送的激光点回波数据集;对激光点回波数据集执行过滤操作,获得候选激光点回波数据集;利用候选激光点回波数据集执行直线拟合操作获得目标直线方程;其中,目标直线方程表示激光 全部
背景技术:
自动驾驶技术已开始应用于卡车领域。对于卡车而言包括牵引车和挂车,且牵引 车和挂车之间通过牵引车上的鞍座和挂车上的牵引销连接,鞍座可绕着牵引销旋转,牵引 车驱动并牵引挂车行驶。 在卡车行驶过程中,车辆拐弯、掉头、换道、泊车等工况下,挂车相对于牵引车有一 定的转向角度。该转向角度对于自动驾驶传感器标定及路径规划决策来说至关重要。 目前主要使用含角度传感器的特定检测装置安装在鞍座或牵引销上,以获取牵引 车和挂车之间相对的转向角度。 但是,由于挂车的转轴与牵引车鞍座之间具有较大的晃动余量,角度传感器难以 直接测量角度,并且,上述方案需要改造原有鞍座或牵引销,由于不同卡车车型其改造方式 不同,所以适应性较差。
技术实现要素:
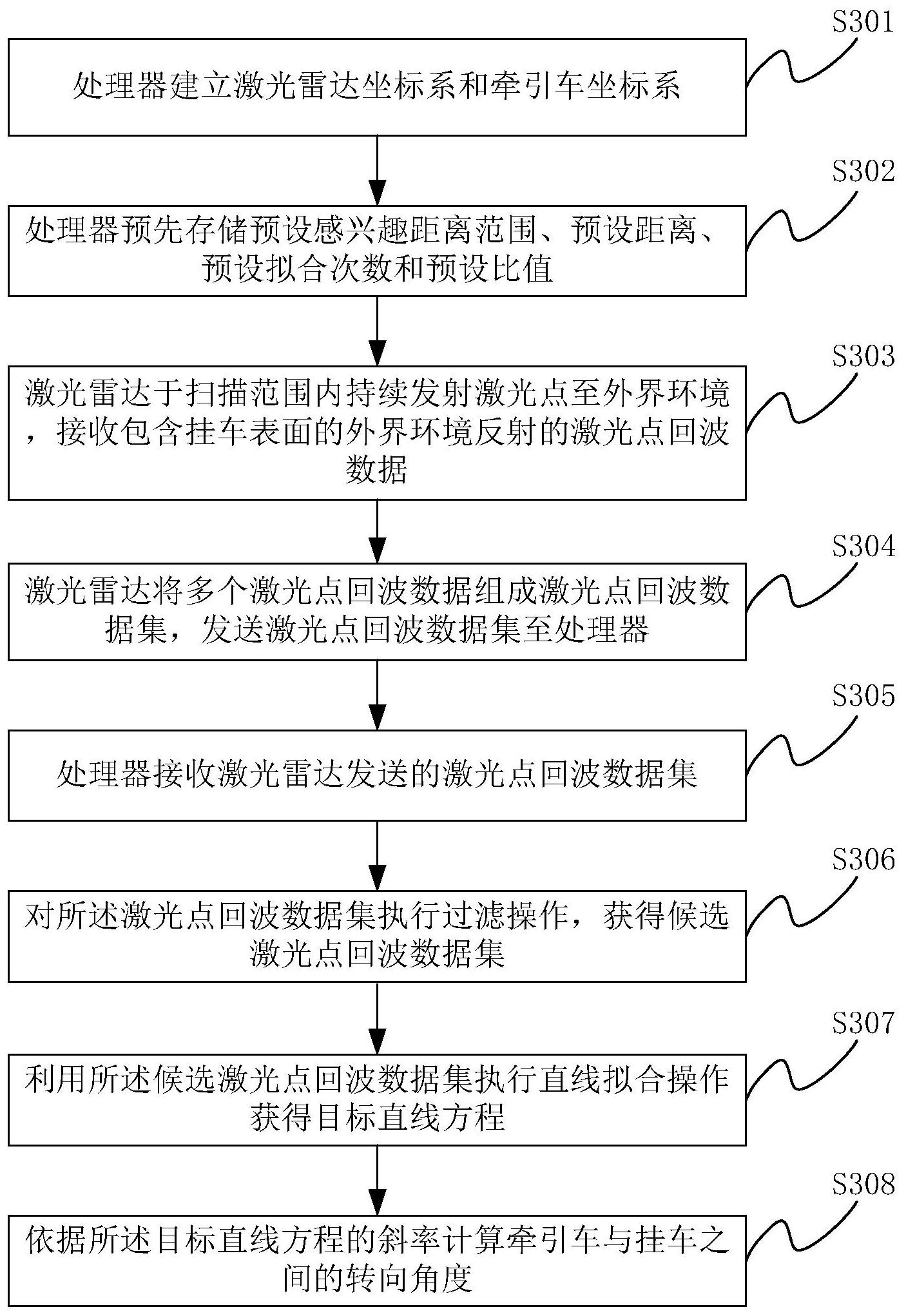
申请人在研究过程中还发现一些其它测量转向角度的方案:基于GPS系统、惯性导 航系统或航姿参考系统来确定转向角度。 对于基于GPS转向角度来确定转向角度而言:GPS系统可通过多颗卫星定位接收机 的位置,因此通过在牵引车和挂车上分别安装两套接收机,计算牵引车和挂车的行进方向, 便可以确定挂车的转角。但是,本方案中若道路两侧具有高大建筑物,则GPS信号较弱,因此 本方法难以工作,鲁棒性较差。 对于基于惯性导航系统来确定转向角度而言:惯性导航系统具有陀螺仪和加速度 计等元件,可直接测量车辆的三轴角速度与角加速度,通过积分获得角度信息。因此将惯性 导航系统安装于牵引车和挂车上,分别测量牵引车和挂车的航向角即可相减获得挂车的转 向角度。 为了提高转向角度的精度,经常采用GPS信号进行航向初始化并修正惯性导航系 统的航向与位移信息。但是由于惯性导航系统的初始化需要GPS信号,因此初始化操作仅能 在空旷场地进行,同时惯性导航系统的初始化需要一定的时间,对于不同的挂车适配性较 差。 对于基于航姿参考系统来确定转向角度而言:航姿参考系统在陀螺仪和加速度计 的基础上增加磁传感器,通过三轴磁强度、三轴角速度以及三轴角加速度数据融合来提高 航向角等角度的测量精度。 但是由于磁传感器参考于地球的重力场与磁场,高纬度区域航向信息测量误差较 大,同时该磁传感器易受磁干扰影响,安装位置需要远离底盘,支架较高,影响车辆外观。 鉴于此,本申请提供转向角度检测方法、装置及系统,可以适用于各种类型的卡 5 CN 111580066 A 说 明 书 2/10 页 车,以获得牵引车和挂车之间相对的转向角度。 为了实现上述目的,本申请提供下述技术特征: 一种转向角度检测方法,应用于转向角度检测系统中的处理器,所述转向角度检 测系统还包括设置于卡车的牵引车与挂车之间且附着于牵引车尾部的激光雷达;所述转向 角度检测方法包括: 接收激光雷达发送的激光点回波数据集;其中,在牵引车驾驶过程中所述激光雷 达于扫描范围内持续发射激光点至外界环境,并接收包含挂车表面的外界环境反射的激光 点回波数据,多个激光点回波数据组成激光点回波数据集; 对所述激光点回波数据集执行过滤操作,获得候选激光点回波数据集; 利用所述候选激光点回波数据集执行直线拟合操作获得目标直线方程;其中,所 述目标直线方程表示所述激光雷达的激光扫射面和所述挂车表面的相交线; 依据所述目标直线方程的斜率计算牵引车与挂车之间的转向角度。 可选的,所述对所述激光点回波数据集执行过滤操作,获得候选激光点回波数据 集,包括: 将所述激光点回波数据集由激光雷达坐标系转换至牵引车坐标系; 在所述牵引车坐标系下,计算所述激光点回波数据集中各个激光点回波数据与所 述激光雷达的坐标点之间的各个直线距离; 在所述激光点回波数据集中,排除直线距离超出预设感兴趣距离范围的激光点回 波数据,剩余的激光点回波数据组成所述候选激光点回波数据集。 可选的,所述将所述激光点回波数据集由激光雷达坐标系转换至牵引车坐标系, 包括: 利用下述公式将所述激光点回波数据集中各个激光点回波数据,由激光雷达坐标 系转换至牵引车坐标系; 其中, 为一激光点回波数据于牵引车坐标系下的坐标, 为一激光点回波数 据于激光雷达坐标系下的坐标,R为激光雷达坐标系与牵引车坐标系之间的旋转矩阵, 激光雷达坐标系原点相对于牵引车坐标系在X轴、Y轴和Z轴方向上的偏移量。 可选的,利用所述候选激光点回波数据集执行直线拟合操作获得目标直线方程, 包括: 在所述候选激光点回波数据集中,随机选取两个激光点回波数据; 利用该两个激光点回波数据和直线方程公式,计算得到候选直线方程; 判断所述候选直线方程是否达到拟合结束条件; 若所述候选直线方程满足拟合结束条件,则确定所述候选直线方程为所述目标直 6 CN 111580066 A 说 明 书 3/10 页 线方程; 否则判断是否达到预设拟合次数; 若未达到预设拟合次数,则执行步骤在所述候选激光点回波数据集中随机选取两 个激光点回波数据; 若达到预设拟合次数,则确定无法拟合得到目标直线方程。 可选的,所述判断所述候选直线方程是否达到拟合结束条件包括: 计算所述候选激光点回波数据集中各个激光点回波数据与所述候选直线方程的 直线距离; 统计直线距离小于预设距离的激光点回波数据的第一数量; 计算所述第一数量与第二数量的比值,其中所述第二数量为所述候选激光点回波 数据集中激光点回波数据的数量; 判断所述比值是否大于预设比值; 若所述比值大于预设比值,则确定达到拟合结束条件; 若所述比值不大于预设比值,则确定未达到拟合结束条件。 可选的,所述依据所述目标直线方程的斜率计算牵引车与挂车之间的转向角度, 包括: 利用公式 计算目标直线方程与牵引车前进方向之间的夹角 利用公式 计算牵引车与挂车之间转向角度θ。 可选的,对所述激光点回波数据集执行过滤操作之后,还包括: 将所述激光点回波数据集中过滤操作过滤的激光点回波数据,组成障碍物激光点 回波数据集; 利用所述障碍物激光点回波数据集,确定障碍物信息。 一种转向角度检测系统,包括: 设置于卡车的牵引车与挂车之间且附着于牵引车尾部的激光雷达,用于在牵引车 驾驶过程中于扫描范围内持续发射激光点至外界环境,并接收包含挂车表面的外界环境反 射的激光点回波数据,多个激光点回波数据组成激光点回波数据集,发送所述激光点回波 数据集至处理器; 与所述激光雷达相连的处理器,用于接收激光雷达发送的激光点回波数据集;对 所述激光点回波数据集执行过滤操作,获得候选激光点回波数据集;利用所述候选激光点 回波数据集执行直线拟合操作获得目标直线方程;其中,所述目标直线方程表示所述激光 雷达的激光扫射面和所述挂车表面的相交线;依据所述目标直线方程的斜率计算牵引车与 挂车之间的转向角度。 可选的,所述牵引车尾板上设置有固定支架,所述激光雷达通过该固定支架设置 于所述牵引车尾板上; 所述转向角度检测系统还包括设置于卡车的牵引车与挂车之间且附着于挂车表 面反射平板,反射平板与所述激光雷达的激光扫射面具有相交线。 一种转向角度检测装置,应用于转向角度检测系统中的处理器,所述转向角度检 测系统还包括设置于卡车的牵引车与挂车之间且附着于牵引车尾部的激光雷达;所述转向 角度检测装置包括: 7 CN 111580066 A 说 明 书 4/10 页 接收单元,用于接收激光雷达发送的激光点回波数据集;其中,在牵引车驾驶过程 中所述激光雷达于扫描范围内持续发射激光点至外界环境,并接收包含挂车表面的外界环 境反射的激光点回波数据,多个激光点回波数据组成激光点回波数据集; 过滤单元,用于对所述激光点回波数据集执行过滤操作,获得候选激光点回波数 据集; 拟合单元,用于利用所述候选激光点回波数据集执行直线拟合操作获得目标直线 方程;其中,目标直线方程表示所述激光雷达的激光扫射面和所述挂车表面的相交线; 角度计算单元,用于依据所述目标直线方程的斜率计算牵引车与挂车之间的转向 角度。 通过以上技术手段,可以实现以下有益效果: 本申请中采用激光雷达获取的激光点回波数据集,来计算并确定牵引车与挂车之 间的转向角度,由于激光雷达的精度较高且达测量不受环境光照的影响,所以提高转角角 度检测方案的稳定性和鲁棒性。 激光雷达设置于卡车的牵引车与挂车之间且附着于牵引车尾部也即安装于挂车 底盘下方,由于激光雷达上方的挂车对激光雷达起到遮挡作用,所以降低雨雪天气对于激 光雷达性能的影响,提高挂车转角测量的可靠性。 激光雷达安装在牵引车上,直接利用挂车反射的激光点回波数据便可以计算得到 转向角度,无需在挂车上搭载传感器,提高牵引车对于不同挂车的适配性。 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他的附图。 图1为本申请实施例公开的一种转向角度检测系统的俯视图; 图2为本申请实施例公开的一种转向角度检测系统的正视图; 图3为本申请实施例公开的一种转向角度检测方法的流程图; 图4为本申请实施例公开的一种转向角度检测系统的坐标图; 图5为本申请实施例公开的一种转向角度检测系统的示意图; 图6为本申请实施例公开的一种转向角度检测装置的结构示意图。











