
技术摘要:
本公开涉及一种二维激光雷达系统,所述系统包括:发射模块,发射激光光束;第一反射镜,接收所述激光光束,并形成反射的第一光束;第二反射镜,接收所述第一光束,并形成反射至目标对象的第二光束,以及接收从所述目标对象返回的第一返回光,并形成反射的第二返回光; 全部
背景技术:
目前,激光雷达广泛应用在军事、汽车、机器人和航海等领域。例如,激光雷达能够 应用于AGV(Automated Guided Vehicle,自动导引运输车)防撞和导航、服务机器人导航、 无人驾驶和汽车辅助驾驶中,激光雷达已成为众多智能设备的核心部件,它的重要性不言 而喻。 但是,目前大多数激光雷达的结构较为复杂,且多采用收发分置的结构方式,致使 发射视场和接收视场存在不重叠的部分,当目标物体处于不重叠的部分时,例如当目标物 体较为接近激光雷达时,激光雷达无法探测到该目标物体的存在,出现近距离盲区的问题, 降低了激光雷达的接收效率。
技术实现要素:
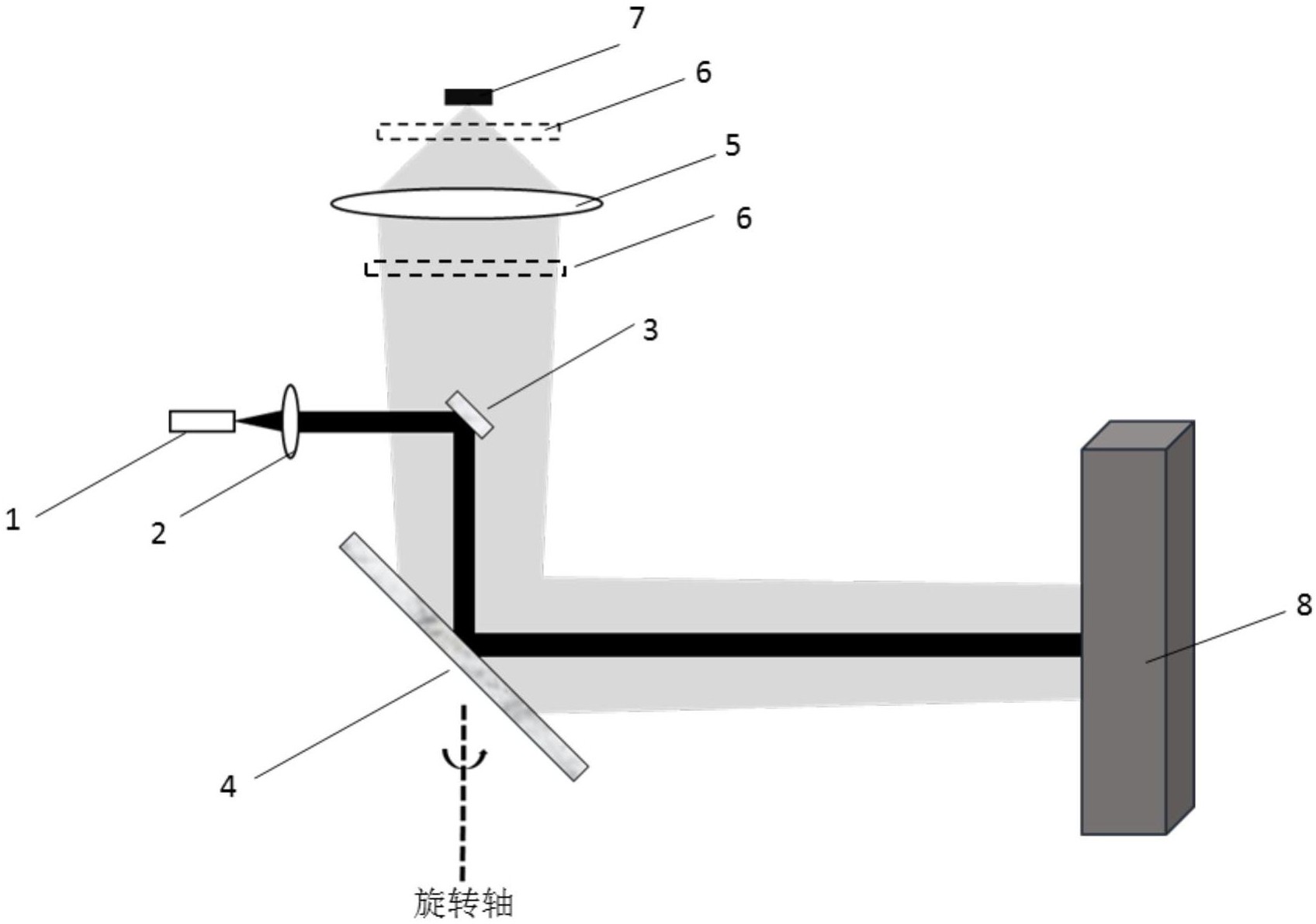
有鉴于此,本公开提出了一种二维激光雷达系统,以解决近距离盲区、结构繁琐、 接收效率较低等问题。 根据本公开的一方面,提供了一种二维激光雷达系统,所述系统包括: 发射模块,发射激光光束; 第一反射镜,接收所述激光光束,并形成反射的第一光束; 第二反射镜,接收所述第一光束,并形成反射至目标对象的第二光束,以及接收从 所述目标对象返回的第一返回光,并形成反射的第二返回光; 接收模块,接收所述第二返回光,并将所述第二返回光进行汇聚形成第三返回光; 光电探测器件,接收所述第三返回光,并将所述第三返回光转换为电信号。 在一些可能的实施方式中,所述第一反射镜、第二反射镜的反射面镀有增反膜,所 述增反膜用于增加对第一光波段的反射率,其中,所述第一光波段包括所述激光光束的波 长。 在一些可能的实施方式中,所述系统还包括: 滤光片,其放置在所述接收模块与所述第二反射镜之间,和/或放置在所述接收模 块与所述光电探测器件之间。 在一些可能的实施方式中,所述系统包括: 处理模块,其被配置为根据所述发射模块发射所述激光光束的时刻和所述光探测 部件接收所述第三返回光的时刻,确定所述目标对象的距离。 在一些可能的实施方式中,所述发射模块还包括: 激光准直部件,将所述发射模块发射的激光光束变成准直的激光光束。 在一些可能的实施方式中,所述系统还包括: 驱动模块,驱动所述第二反射镜旋转; 3 CN 111610507 A 说 明 书 2/6 页 其中,所述第二反射镜在驱动模块的驱动下能够绕旋转轴旋转,所述旋转轴垂直 于所述发射模块发射激光光束的方向,所述第二反射镜的旋转角度范围为0~360度。 在一些可能的实施方式中, 所述第一反射镜的反射面朝向所述发射模块,所述第一反射镜的反射面与所述发 射模块发射激光光束的方向的夹角为45度。 在一些可能的实施方式中, 所述第二反射镜的反射面与所述第一反射镜的反射面互相面对且平行。 本发明实施例的二维激光雷达系统,结构简单,无需使用复杂的光学器件,也无需 采用透镜打孔、反射镜打孔等复杂工艺,能够有效节约成本。本公开实施例通过采用收发合 置的结构形式来提高系统接收返回光的接收效率,从而减小光电探测器件的光敏面面积, 降低背景光的引入,提高响应速率,并且能够有效解决激光雷达近距离盲区的问题。 根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得 清楚。 附图说明 包含在说明书中并且构成说明书的一部分的附图与说明书一起示出了本公开的 示例性实施例、特征和方面,并且用于解释本公开的原理。 图1示出根据本公开一实施例的二维激光雷达系统的示意图。 图2示出根据本公开一实施例的二维激光雷达系统的结构框图。 图3示出根据本发明一实施例的激光雷达系统的局部示意图。











