
技术摘要:
本发明提供一种高精度地图的构建方法、系统、终端和存储介质,包括以下步骤:S01:获取雷达扫描点云,给点云两两配准,生成重建后的点云,以惯性测量单元去除雷达运动过程产生的点云畸变;S02:提取每一帧点云的特征点,进行相邻帧特征点关联匹配;获取采集点云间隔时 全部
背景技术:
精细地图作为一种电子地图,包括空间矢量数据和属性信息,空间矢量数据是电 子地图属性信息的载体。传统电子地图的制作方法是采用基于栅格数据抽象提取空间矢量 数据的方法或利用GPS、机器人定位跟踪装置记录采集所经区域的空间位置及视野信息,加 工生产空间矢量数据。而这种精细地图并不能满足L4乃至L5等级自动驾驶的需求。 高精度地图不仅包含空间矢量数据还包括许多语义信息,地图可能会报告交通灯 上不同颜色的含义,也可能指示道路的速度限速,以及左转车道的位置,高精度地图做重要 的特征之一是,精度,手机上的导航只能达到米级精度,高精度地图可以达到厘米级精度, 这对无人驾驶车至关重要。保持这些地图的更新是一项重大任务,调查车队需要不断地对 高精度地图进行验证和更新。此外,这些地图精度可以达到几厘米,这是水准最高的制图精 度。高精度地图专为无人驾驶车设计,包含道路定义、交叉路口、交通信号、车道规则以及用 于汽车导航的其他元素。
技术实现要素:
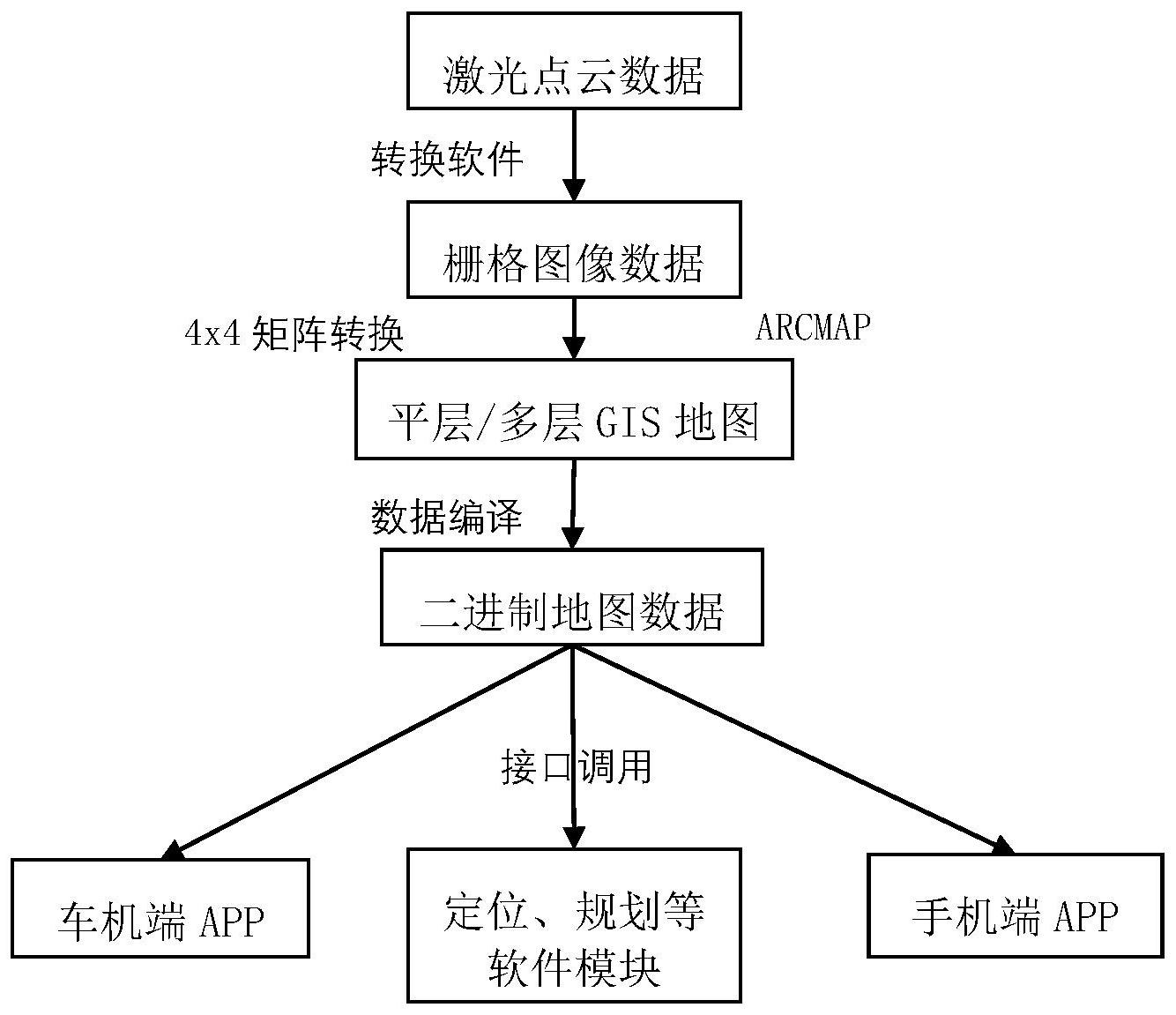
为了解决上述的以及其他潜在的技术问题,本发明提供了一种高精度地图的构建 方法、系统、终端和存储介质,特征点提取不采用现有特征,而是根据曲率大小,提取边角和 平面特征;以惯性测量单元去除点云畸变,再提取特征点,进行特征点关联匹配,将一定距 离地面一定高度的特征映射到地平面上形成高精度地图。 一种高精度地图的构建方法,包括: S01:获取雷达扫描点云,给点云两两配准,生成重建后的点云,以惯性测量单元去 除雷达运动过程产生的点云畸变; S02:提取每一帧点云的特征点,进行相邻帧特征点关联匹配;获取采集点云间隔 时间内雷达姿态的变换; S03:提取三维点云中的地面点,形成地面特征集合生成高精度地图。 进一步地,步骤S01中获取雷达扫描点云的具体方法是: S011:可以根据需求,看是否需要加入组合导航进行建图,如果没有特殊要求,最 好保证激光雷达和视频是同步的; S012:线接好后,需要打开板子电源、激光雷达电源,确认同步信号是否接收。电脑 通过网线接激光雷达盒子的网口,并手动设置电脑的IP,打开wireshark,选择对应的网卡, 筛选端口; S013:使组合导航和激光雷达同步,将激光雷达自带的GPS模块接到激光雷达盒子 上即可,此时端口的GPS的时间即为真正的GPS时间。组合导航需要进行如下设置:1.测量 4 CN 111612829 A 说 明 书 2/15 页 IMU、GNSS天线、激光雷达设备之间的3D距离;2.初始化基站,获取基站的准确位置;确认同 步之后,需要规划扫图的路径。一般较小的停车场,可以一次将数据采集完的停车场,如纳 贤800地下停车场,可以按纳贤800来规划路径;对于较大型的停车场,一次全部采集完比较 困难,可以分路段采集,但是要保证每段之间都有重复的路径,便于后期拼合; S014:视频数据录制,板子需要接入5路摄像头,一块屏幕,并连接adb,并且需进入 ubuntu系统或者ubuntu虚拟机,待adb连接成功后,进入命令行依次输入命令开始录制,如 停止录制数据,在与上步同一命令行输入以下命令$./recording .sh stop。启动录制时可 能出现的问题以及解决方法:显示器连接错误:检查屏幕电源线和HDMI线连接;摄像头连接 超时:检查摄像头连接顺序以及稳固程度;./recording.sh启动和停止失败:重启板子。 S015:雷达数据录制,车速要求控制在10km/h左右,打开veloview,选择激光雷达 小图标,弹出驱动选择界面,根据所用激光雷达选择对应的驱动,点击ok,可以显示实时点 云;点击的record开始录制,成功连接激光雷达后,此按钮呈现红色,并为可用状态,点击后 选择保存路径即可,停止录制,再次点击此按钮即可。 S016:组合导航录制:1)设备安装:a.将组合导航设备水平安装于汽车后备箱的支 架上,并予以固定。b.连接组合导航与GNSS天线,测量并记录两者之间的杆臂。(2)电源连 接:将组合导航设备电源与插排相连接(3)开始录制:a.选择室外开阔区域,开启设备电源, 准备录制。b.观察GNSS信号指示灯,正常后可开启数据录制按钮,开始录制IMU和GNSS原始 数据。(4)结束录制:测试完成后,关闭数据录制按钮,结束录制。(5)数据导出:将设备USB线 缆与PC相连接,导出IMU和GNSS原始数据。(6)数据处理:使用组合导航设备专业后处理软件 (GINS)进行组合导航后处理(7)结果分析和导出:使用GINS软件进行结果分析,若满足要 求,则可按需导出组合导航后处理结果。 进一步地,步骤S01中重建点云的具体方法是: 点云重建的过程其实可以归结为两两点云配准的过程(po i n t c l o u d registration),优选地,采用最近点迭代(Iterative Closest Point,ICP)。 进一步地,所述步骤S01中最近点迭代(Iterative Closest Point,ICP)的具体步 骤是: S017:数据获取; S018:特征点估计,通常是对点云进行降采样,或者采用其他计算方式 S019:特征值计算,采用的特征值通常有NARF、FPFH、SIFT等等,计算特征值的目的 主要是匹配 S020:关联点匹配,需要用到近邻搜索的方式匹配后可以根据匹配的点计算出两 帧点云的刚体变换,采用的方法比如奇异值分解(SVD)。 进一步地,所述为了避免最近点迭代(Iterative Closest Point,ICP)的缺点,一 般会采用一些别的算法计算出初值,然后再用ICP进行精配准,这些算法包括贪婪初始配准 (greedy Initial Alignment)、随机采样(sample consensus)等等。 进一步地,所述步骤S01中,以惯性测量单元去除雷达运动过程产生的点云畸变的 具体步骤是: S021:我们可以获得点云初始时刻的IMU状态_imuStart,以及经过实际扫描时间 relSweepTime后,当前时刻的IMU状态_imuCur。: 5 CN 111612829 A 说 明 书 3/15 页 S022:计算:经过扫描时间后,当前点产生的漂移:_imuPositionShift=_ imuCur.position-_imuStart.position-_imuStart.velocity*relSweepTime; S022:上式假定在扫描时间relSweepTime内,车是匀速运动的(因为IMU频率很 高)。 优选地,有lidar采用的扫描方式是旋转式的,车也是运动的,下一时刻扫描进行 的同时,车如果向前运动,那么激光雷达的原点位置也向前移动了,当前时刻返回的坐标点 位置,实际上相对于原来的位置是靠后了,整体点云就有被拉伸的可能。因为IMU的频率较 高,我们就可以通过IMU的速度,计算出当前点的漂移量,从而校正点云畸变。不过,因为现 在采集车的车速比较慢,没有去除点云畸变这一步算法也可以正常运行。 进一步地,所述步骤S02中提取每一帧点云的特征点的具体步骤是:根据曲率大 小,提取边角和平面特征。优选地,设点i是点云 的一点,是位于同一扫描线的点集,那 么局部表面的平滑度可以由以下函数定义: 如果一个点的c值,大于设定的最大值,则为边特征点;小于设定的最小值,则为面 特征点。为了更好的描述环境,我们将一次扫描线分成四个区域,每个区域保留两个边点和 四个面点。 进一步地,所述步骤S02中进行相邻帧特征点关联匹配的具体步骤是: 对于当前帧边特征点,在下一帧寻找当前点的最近邻点j,再寻找次近邻点l。对于 当前帧的面特征点,先在下一帧寻找当前点的最近邻点j,再寻找两个次近邻点l和m。它们 之间的关系如图4所示。设Pk为tk时刻的点云, 为其在tk 1时刻的投影,Pk 1为tk 1时刻的点 云。 和Pk 1用于估计lidar的运动。εk 1和 分别为边特征点集合和面特征点集合。我们 可以在其中找到 的关联点。每次迭代时,我们需要将特征点集投影到上一时刻,得到 和 对于一个边点 如果(j,l)是关联的边线, 那么点到线的距离可以 表示为: X均为三维坐标。同理可得,点 对于由 构成的关联面,有点到平 面的距离: 进一步地,所述步骤S02中获取采集点云间隔时间内雷达运动的具体步骤是: S023:设 为[tk 1,tk]之间的姿态变换, 是6-DOF的刚体变换; 6 CN 111612829 A 说 明 书 4/15 页 tx,ty,tz是三轴的平移,θx,θy,θz是三轴旋转角,给定一点i∈Pk 1,ti为 这个点的时间, 为[tk 1,ti]之间的变换, 可以通过插值计算: S024:为了估计雷达的运动,我们需要知道εk 1和 或者 和 之间的关 系,我们可以定义: 为三轴的平移,R为旋转矩阵,可以由罗 德里格斯公式定义: 上式中,θ为旋转程度: ω是与旋转方向相关的单位向量: 是ω的斜对称矩阵。 S025:结合上述的距离计算公式并结合上述公式,我们可以得到边特征点和与其 相关的边线之间的关系: 同理,对于面特征点与其关联面之间也有如下关系: 采用L-M算法计算lidar运动,结合两个距离公式,可以得到非线性方程: S026:对上述公式求取关于 的雅克比矩阵,定义为 通过迭代,最小 化d得到高精度地图,迭代公式如下: λ是由L-M算法定义的系数。 进一步地,所述步骤S02中还包括雷达的里程计数据获取步骤,其具体步骤是: 算法流程如下表所示: 7 CN 111612829 A 说 明 书 5/15 页 8 CN 111612829 A 说 明 书 6/15 页 进一步地,所述假设在地面上铺一张布,布料由于重力作用而下坠。如果布料足够 软,那么会完全的贴合地面。算法过程为:a)翻转点云;b)覆盖布料。在布料模型中,布料是 9 CN 111612829 A 说 明 书 7/15 页 由互相连接的节点构成的栅格模型,被称为弹簧模型。节点之间的可以定义成“虚拟弹簧”, 遵循胡克定律(F=-kx) 根据牛顿第二定律,位移和力之间的关系: X是t时刻位移;Fext(X,t)是重力和障碍物所造成的碰撞产生的力;Fint(X,t)弹力 在点云中有如下规则: 节点的移动限制在垂直方向 节点到达正确位置后,地面,被设为不可移动 力的作用被分成两步,以提高效率 点的移动可分为四个阶段,如图8所示:a)初始化;b)在重力作用下下降;c)内部检 测,是否到达临界点;d)可移动点继续移动。 进一步地,所述步骤S03中形成地面特征集合生成高精度地图的具体方式是: S031:设置栅格化的分辨率为0.03cmX0.03cm; S032:计算点云边界,以及栅格图像的大小; S033:统计每个网格内点的数量、累高度反射率; S034:计算每个网格内平均高度以及反射率; S035:对整幅图像的平均反射率进行归一化,并且乘以255,作为图像的灰度值。 优选地,所述栅格化后的图像如图5所示。 一种高精度地图的构建系统,包括: 点云重建单元,所述点云重建单元用于两两点云的配准, 惯性测量单元,所述惯性测量单元用于去除雷达在运动过程中产生的点云畸变; 特征提取模块,所述特征提取模块提取每一帧点云的特征点; 关联匹配模块,所述关联匹配模块用于将提取出的特征点进行相邻帧特征点关联 匹配;获取采集点云间隔时间内雷达姿态的变换; 地图生成模块,所述地图生成模块用于以特征点以及特征点关联区域的特质生成 高精度地图。 进一步地,还包括地面特征集生成模块,所述地面特征集生成模块自特征提取模 块提取特征中获取在特征点位置处于地面上的特征点,并形成地面特征集,地面特征集用 于地面轮廓和障碍物的表征。 一种终端设备,如可以执行上述高精度地图的构建方法的智能手机或可以执行上 述高精度地图的构建方法程序的车载终端控制设备。 一种服务器,所述服务器包括用于实现上述高精度地图的构建方法和/或高精度 地图的构建系统。 一种计算机存储介质,所述计算机存储介质用于存储上述高精度地图的构建方法 所对应的软件程序和/或高精度地图的数据管理系统。 如上所述,本发明的具有以下有益效果: 特征点提取不采用现有特征,而是根据曲率大小,提取边角和平面特征;以惯性测 量单元去除点云畸变,再提取特征点,进行特征点关联匹配,将一定距离地面一定高度的特 10 CN 111612829 A 说 明 书 8/15 页 征映射到地平面上形成高精度地图。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1显示为本发明的流程示意图。 图2显示为最近点迭代的流程示意图。 图3显示为本发明地图构建的流程示意图。 图4显示为边特征点和面特征点关联示意图。 图5显示为本发明地图构建方法的实施结果示意图。 图6显示为本发明ARCMAP地图生成的图示。 图7显示为本发明处理完成的矢量地图的图示。 图8显示为布料模拟滤波示意图的示意图。











