
技术摘要:
本发明公开了一种车路协同环境下基于多路径方案的交叉口车辆诱导方法和系统,其在交叉口进口道处安置智能路侧子系统,可以用于实时监测进入该交叉口范围的车辆和信号灯状态;智能车辆子系统获取车辆行驶状态数据和车辆多路径诱导方案,智能交通管理系统根据交叉口相关 全部
背景技术:
车辆诱导系统是智能交通系统的重要组成部分。车辆诱导系统一方面可以辅助驾 驶员开展行驶路径决策,提高出行效率;另一方面,通过合理地引导驾驶员行驶路线,可以 改变路网的运行状态,实现交通流在路网中的合理分配,缓解城市交通拥堵。传统的导航系 统主要通过静态最短路径算法计算最短路径。但由于没有考虑实时变化的路况(如拥堵、交 通事故等),故而得到的最短路径可能并非实际时间最短的路径。 随着车路协同技术的应用,路径诱导系统可获取更为丰富的车辆行驶数据和实时 的路况信息。在此基础上,出现了考虑驾驶员偏好或路况不确定变化的多路径诱导方法。多 路径诱导方案由多条简单路径方案构成,其中的每条简单路径随驾驶员个体特征或路网运 行状态的变化都可能成为最优路径方案。采用多路径诱导方案,在部分交叉口处由于多方 案的叠加,将出现多个转向同时可用的情况。如果能充分利用交叉口的信号相位变化,驾驶 员将能够根据实际情况,灵活地改变行进路线,实现对信号灯延误及排队拥堵的规避。然 而,在实际应用中,大部分驾驶员难以快速准确地判断前方交叉口处延误最小的转向,影响 了多路径诱导方案的实施效果。
技术实现要素:
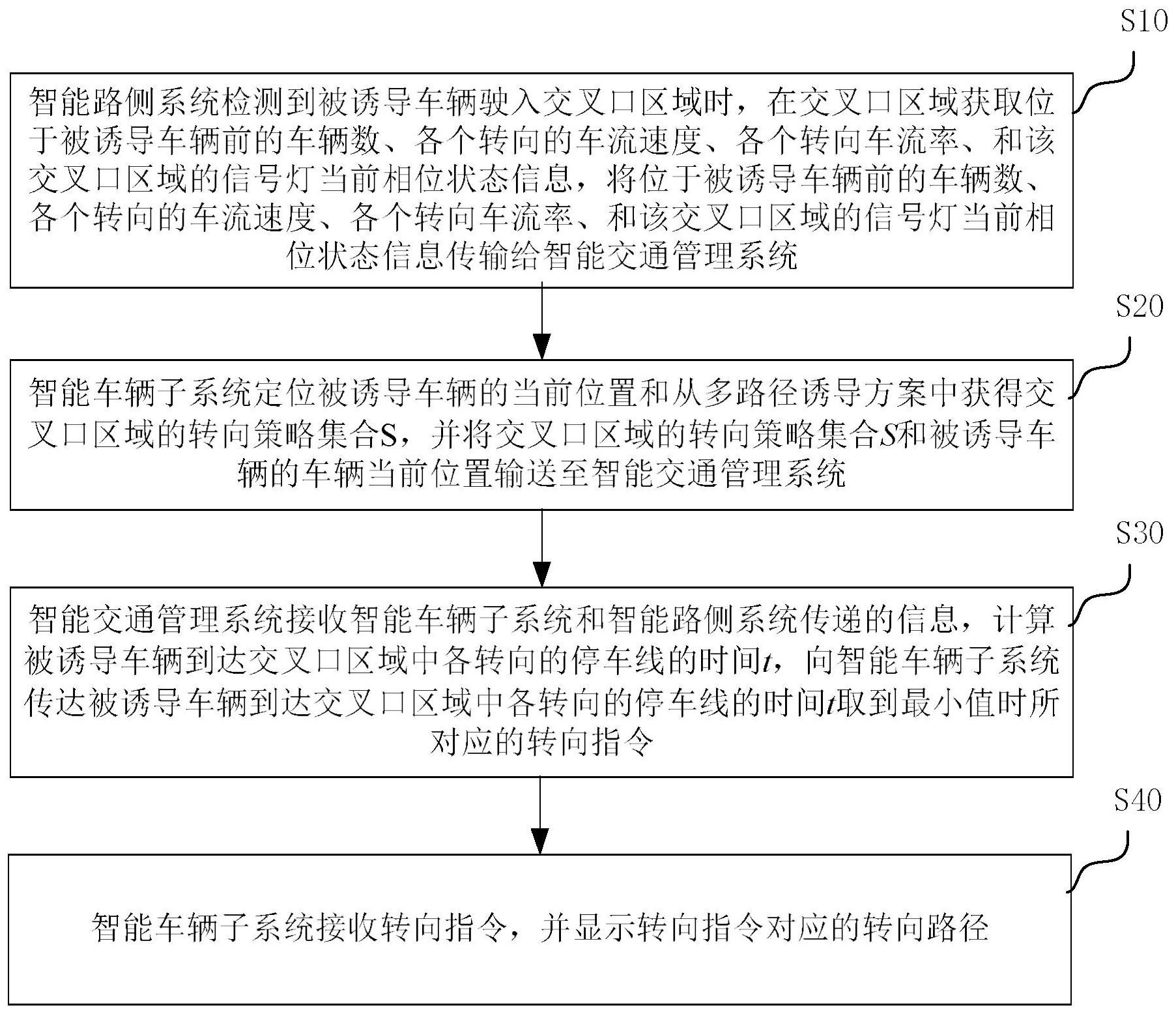
针对以上问题,本发明提出一种车路协同环境下基于多路径方案的交叉口车辆诱 导方法和系统。 为实现本发明的目的,提供一种车路协同环境下基于多路径方案的交叉口车辆诱 导方法,包括如下步骤: S10,智能路侧系统检测到被诱导车辆驶入交叉口区域时,在交叉口区域获取位于 被诱导车辆前的车辆数Q1、各个转向的车流速度v1、各个转向车流率q、和该交叉口区域的信 号灯当前相位状态信息,将位于被诱导车辆前的车辆数Q1、各个转向的车流速度v1、各个转 向车流率q、和该交叉口区域的信号灯当前相位状态信息传输给智能交通管理系统; S20,智能车辆子系统定位被诱导车辆的当前位置和从多路径诱导方案中获得交 叉口区域的转向策略集合S,并将交叉口区域的转向策略集合S和被诱导车辆的车辆当前位 置输送至智能交通管理系统; S30,智能交通管理系统接收智能车辆子系统和智能路侧系统传递的信息,计算被 诱导车辆到达交叉口区域中各转向的停车线的时间t,向智能车辆子系统传达被诱导车辆 到达交叉口区域中各转向的停车线的时间t取到最小值时所对应的转向指令; S40,智能车辆子系统接收转向指令,并显示转向指令对应的转向路径。 具体地,所述交叉口区域包括距被诱导车辆前方的停车线设定距离的区域。 4 CN 111583677 A 说 明 书 2/8 页 具体地,被诱导车辆到达交叉口区域中各转向的停车线的时间t的计算过程包括: 当转向为绿灯时,获取该转向剩余的绿灯时间t1和车辆从当前位置到达该转向停 车线的距离l,计算该转向剩余绿灯时间可通过车辆数Q2;若Q2≥Q1,被诱导车辆到该转向停 车线的时间t=l/v1;若Q2











